2. Устройство по п. , отличающееся тем, что кинематическая связь пластин с дополнительными двуплечими рычагами выполнена из штоков с продольными пазами и пальцев, расположенных в продольных пазах с возможностью перемещения.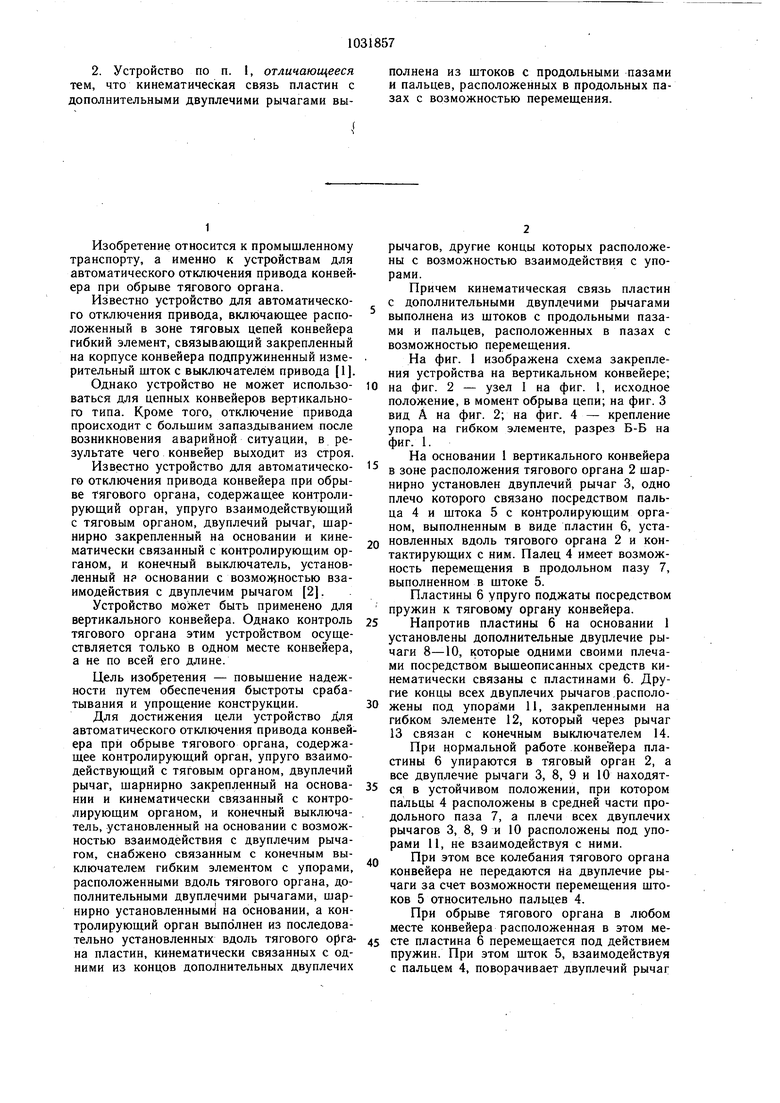

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для улавливания тягового органа конвейера при его обрыве | 1982 |
|
SU1043081A1 |
| Натяжное устройство тяговых органов конвейеров | 1989 |
|
SU1712272A1 |
| Привод шаговых перемещений | 1990 |
|
SU1778048A1 |
| ПОДЪЕМНИК | 1996 |
|
RU2094355C1 |
| Поточная линия сборки кабины лифта | 1975 |
|
SU515617A2 |
| Устройство для гибки обечаек из листовых заготовок | 1977 |
|
SU710725A1 |
| НАКОПИТЕЛЬНЫЙ КОНВЕЙЕР ШТУЧНЫХ ГРУЗОВ | 1991 |
|
RU2018472C1 |
| Ловитель кареток на наклонных участках подвесного конвейера | 1983 |
|
SU1129149A1 |
| Подъемник | 1985 |
|
SU1357335A1 |
| Цепной конвейер | 1982 |
|
SU1016238A1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ОТКЛЮЧЕНИЯ ПРИВОДА КОНВЕЙЕРА ПРИ ОБРЫВЕ ТЯГОВОГО ОРГАНА, содержащее контролирующий орган,- упруго взаимодействующий с тяговым. органом, двуплечий рычаг, шарнирно закрепленный на основании и кинематически связанный с контролирующим органом и конечный выключатель, установленный на основании с возможностью взаимодействия с двуплечим рычагом, отличающееся тем, что, с целью повыщения надежности путем обеспечения быстроты срабатывания, оно снабжено связанным с конечным выключателем гибким элементом с упорами, расположенным вдоль тягового органа, и дополнительными двуплечими рычагами, щарнирно установленными на основании, а контролирующий орган выполнен из последовательно установленных вдоль тягового органа пластин, кинематически связанных с одним из концов дополнительных двуплечих рычагов, свободные концы которых расположены с возможностью взаимодействия с упорами.
1
Изобретение относится к промышленному транспорту, а именно к устройствам для автоматического отключения привода конвейера при обрыве тягового органа.
Известно устройство для автоматического отключения привода, включающее расположенный в зоне тяговых цепей конвейера гибкий элемент, связывающий закрепленный на корпусе конвейера подпружиненный измерительный шток с выключателем привода 1.
Однако устройство не может использоваться для цепных конвейеров вертикального типа. Кроме того, отключение привода происходит с большим запаздыванием после возникновения аварийной ситуации, в результате чего конвейер выходит из строя.
Известно устройство для автоматического отключения привода конвейера при обрыве тягового органа, содержащее контролирующий орган, упруго взаимодействующий с тяговым органом, двуплечий рычаг, шарнирно закрепленный на основании и кинематически связанный с контролирующим органом, и конечный выключатель, установленный на основании с возмо кностью взаимодействия с двуплечим рычагом 2.
Устройство может быть применено для вертикального конвейера. Однако контроль тягового органа этим устройством осуществляется только в одном месте конвейера, а не по всей его длине.
Цель изобретения - повышение надежности путем обеспечения быстроты срабатывания и упрощение конструкции.
Для достижения цели устройство для автоматического отключения привода конвейера при обрыве тягового органа, содержащее контролирующий орган, упруго взаимодействующий с тяговым органом, двуплечий рычаг, шарнирно закрепленный на основании и кинематически связанный с контролирующим органом, и конечный выключатель, установленный на основании с возможностью взаимодействия с двуплечим рычагом, снабжено связанным с конечным выключателем гибким элементом с упорами, расположенными вдоль тягового органа, дополнительными двуплечими рычагами, шарнирно установленными на основании, а контролирующий орган выполнен из последовательно установленных вдоль тягового органа пластин, кинематически связанных с одними из концов дополнительных двуплечих
рычагов, другие концы которых расположены с возможностью взаимодействия с упорами.
Причем кинематическая связь пластин с дополнительными двупдечими рычагами выполнена из штоков с продольными пазами и пальцев, расположенных в пазах с возможностью перемещения.
На фиг. 1 изображена схема закрепления устройства на вертикальном конвейере;
на фиг. 2 - узел I на фиг. 1, исходное положение, в момент обрыва цепи; на фиг. 3 вид А на фиг. 2; на фиг. 4 - крепление упора на гибком элементе, разрез Б-Б на фиг. 1.
На основании 1 вертикального конвейера
в зоне расположения тягового органа 2 шарнирно установлен двуплечий рычаг 3, одно плечо которого связано посредством пальца 4 и штока 5 с контролирующим органом, выполненным в виде пластин 6, установленных вдоль тягового органа 2 и контактирующих с ним. Палец 4 имеет возможность перемещения в продольном пазу 7, выполненном в щтоке 5.
Пластины 6 упруго поджаты посредством пружин к тяговому органу конвейера.
Напротив пластины 6 на основании 1 установлены дополнительные двуплечие рычаги 8-10, которые одними своими плечами посредством вышеописанных средств кинематически связаны с пластинами 6. Другие концы всех двуплечих рычагов.расположены под упорами 11, закрепленными на гибком элементе 12, который через рычаг 13 связан с конечным выключателем 14. При нормальной работе .конвейера пластины 6 упираются в тяговый орган 2, а все двуплечие рычаги 3, 8, 9 и 10 находятся в устойчивом положении, при котором пальцы 4 расположены в средней части продольного паза 7, а плечи всех двуплечих рычагов 3, 8, 9 и 10 расположены под упорами 11, не взаимодействуя с ними.
При этом все колебания тягового органа конвейера не передаются На двуплечие рычаги за счет возможности перемещения штоков 5 относительно пальцев 4.
При обрыве тягового органа в любом месте конвейера расположенная в этом месте пластина 6 перемещается под действием пружин. При этом шток 5, взаимодействуя с пальцем 4, поворачивает двуплечий рычаг
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматическогоОТКлючЕНия пРиВОдА СКРЕбКОВОгОКОНВЕйЕРА | 1979 |
|
SU818994A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| АВТОМАТИЧЕСКИЙ ЛОВИТЕЛЬ ТЯГОВОГО ОРГАНАКОНВЕЙЕРА | 0 |
|
SU337314A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
