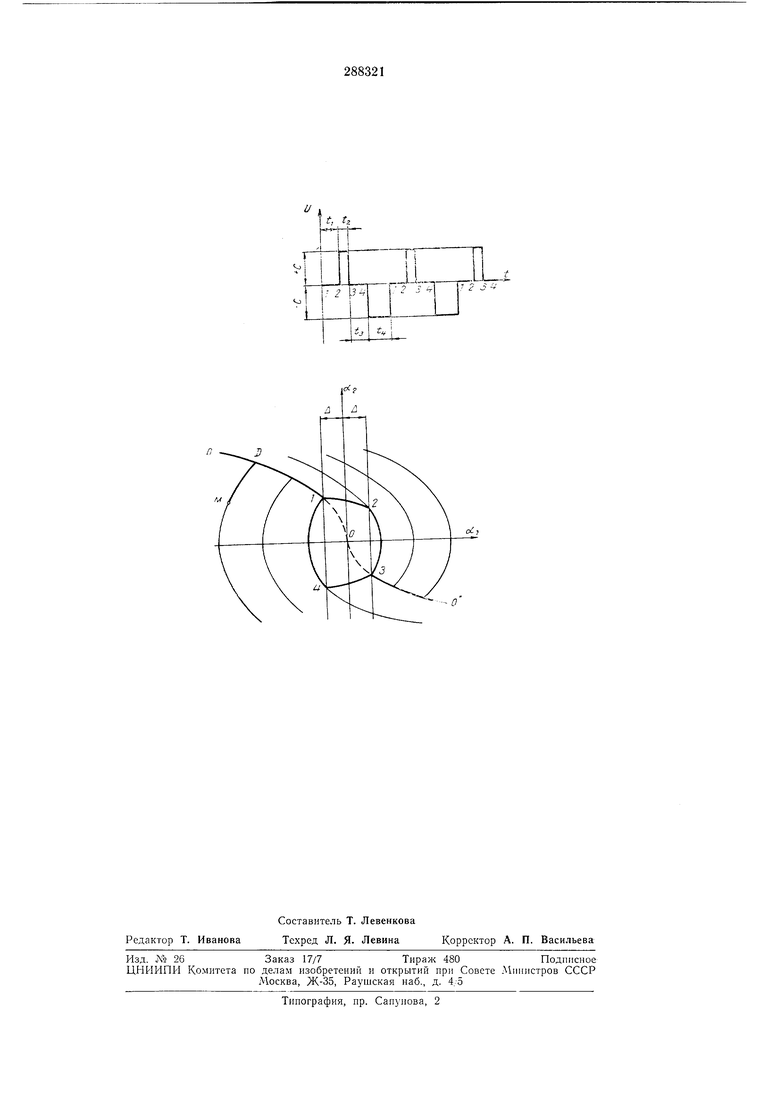
Изобретение относится к способам определения азимута маятникового трехстепенного гирокомпаса. Известные способы определения азимута маятникового трехстепенного гирокомпаса нутем согласования чувствительного элемента с корпусом прибора обладают большим временем преобразования информации. Предлагаемый способ определения азимута маятникового трехстепенного гирокомпаса не имеет этого недостатка и отличается от известных тем, что измеряют длительность импульсов управляющего момента в режиме установившихся незатухающих колебаний чув.сТВительното элемента около согласованного положения и по соотнощению длительно-стей импульсов управляющего момента противоположного знака судят об азимуте гирокомпаса. На чертеже представлены фазовая диаграмма управляющего движения чувствительного элемента маятникового трехстепенного гирокомпаса и соответствующий график изменения во времени момента, накладываемого на чувствительный элемент, поясняющие предлагаемый способ определения азимута маятникового трехстепенного гирокомпаса. tti - угол поворота чувствительного элемента в азимуте относительно следящего корпуса; ; й, Я-0; - кинетический момент гиромотора;Q - угловая скорость вращения Земли;т - масса чувствительного элемента; g - ускорение силы тялсести; / - расстояние от точки подвеса до центра тяжести чувствительного элемента; / ±в-ао; г-произвольные постоянные, зависящие от начальных условий; В соответствии с выражением (1) уравнения фазовых траекторий линий переключений ОО и следующие: («,+в + я„Г+р -(9+а„); (а в + «о) + ( {-е + .„). Двил;ение чувствительного элемента из произвольной точки М фазовой плоскости происходит в соответствии с уравнением (1) фазовых траекторий до пересечения с линией переключения в точке D. В точке D вычислительное устройство, имея информацию о движении чувствительного элемента, изменит знак управления, которое служит для получения максимального быстродействия согласования чувствительного элемента со следящим корпусом релейным и изменяется по закону, L C-sign CiSin(co/+C2), , и чувствительный элемент по линии переключения приходит в согласованное со следящим корпусом положение. Предполагается, что начальные условия движения чувствительного элемента таковы, что приход чувствительного элемента в согласованное со следящим корпусом положение осуществляется с одним переключением. Если имеется некоторая зона нечувствительности по фазовой координате cti, то движение чувствительного элемента на фазовой плоскости происходит в соответствии с фазовой диаграммой, изображенной толстыми линиями. По линии переключения, например О1, чувствительный элемент приходит на границу зоны нечувствительности в идеальном случае в точку 1, в пределах зоны нечувствительности происходит неуправляемое свободное движение чувствительного элемента. При выходе чувствительного элемента из оны нечувствительности управляющее воздействие снова возвращает его в эту зону, после чего происходит свободное движение чувствительного элемента. Таким образом устанавливается режим движения чувствительного элемента по замкнутому циклу 1-2-3-4-1 на фазовой плоскости. Импульсы управляющего воздействия, соответствующие двилсению по участкам 2-3 и 4- фазовой траектории имеют различную длительность и, сравнивая промежутки времени 2-3 и 4-1, получают информацию о местонахождении истинного меридиана по отношению к следящему корпусу. Для получения азимута следящего корпуса умножают полученную разность на постоянную прибора ш (-)|/в где л - щирина зоны нечувствительности. Для реализации предлагаемого способа могут применяться электромагнитные датчики момента, пневматические, использующие упругие эле.менты, и др. Предмет изобретения Способ определения азимута маятникового трехстепенного гирокомпаса путем согласования чувствительного элемента с помощью управляющего момента с корпусом прибора, отличающийся тем, что, с целью сокращения времени преобразования информации, измеряют длительность импульсов управляющего момента в установившихся незатухающих колебаний чувствите тьного эле.мента около согласованного положения и по соотношению длительностей импульсов управляющего момента противоположного знака судят об азимуте гирокомпаса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения азимута наземным гирокомпасом | 1979 |
|
SU1622760A1 |
| Способ определения меридиана маятниковым гирокомпасом | 1981 |
|
SU1035423A1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
| ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1995 |
|
RU2095563C1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| Способ приведения чувствительного элемента гирокомпаса в плоскость меридиана | 1972 |
|
SU449239A1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| Гирокомпас | 1990 |
|
SU1756761A1 |