СР
ел
О5
:о
Изобретешге относится к электротехнике в часпшсти к стабилизированным злэктропривопам.
По основному авТо св. № в35587, азгзестно устройство tuiH стабилизации cKopocTSj вращения, содержащее основной электродвигатель, к которому подключен блок регулирования, состоящий из после .довательно соединеных импульсов aatMHка, формирователн импульсоВв измерителя фйзового рассогласования и усилителя, вспомогательный электродвигатель, к ко- торощг подключен блок регулирования, состоядий КЗ последовательно соед1шен« Iaix имлульсногчэ датчика, установленного sia валу 5жоря вспомогательного электродвигаталя, формирователя импульсов , кзмерителя фазового рассогласования усилителя V( задающего генератораа под5сшо-1олно1 о к измерителю фазового рас сог7хесоваг яя блока ре:гулироваяия основкогс электроцвигатеяя, якорь вспомогательного электройвигателя соединён с яКо рем основного электродвигателя, импульс ный датчик блока регулирования которого зшсреплен на его статоре, образующем выхоакой вал основного электродвигате, ля г. . Медостатком указа шого устройства .яЕЛй8-;Сй боо1ьшая ошибка при изменешш моллента нагрузки на выходном валу уст ройства, вызванная тем, что основной электродБкгатеяь опирается на вал вспо могао: ;ты1ого, а не непосредственно на Сталин ;/, Так, iranptiMep, при увеличении «омента нагрузки скорость вьзходиого вахй уменьщается и система управления скоростью основного электродвигателя, отрг бзтывая полученное возмущение, пере дает увелэтение момента нагрузки с выходного вала устройства на вал вспомога тельного электродвигателя, скорость которого 11ачинает изменяться, и только после этого система управления скоростью вспомогательного электродвигателя отра- тьшает полученное в 5змущение. Таким образом, отработка возмущения на выходном ва..т1у устройства происходит с загйздьтанием, что определяет больигае ошибки стабилизащщ скорости, Цепью изобрете тая является повьпие- н-не точности стабилизации скорости. Поставленная цель достигается тем, что в устрСйство дополнительно введены носипедоЕйтельно соединенные датчик тока якоря вспомогательноро электродвигателя к второй ВХОД которого соединен с выходом измерителя фазового рассогласовшшя вспомогательного электродшсгателя, а выход сумматора соединён со входом усилителя вспомогательного электродвигателя,
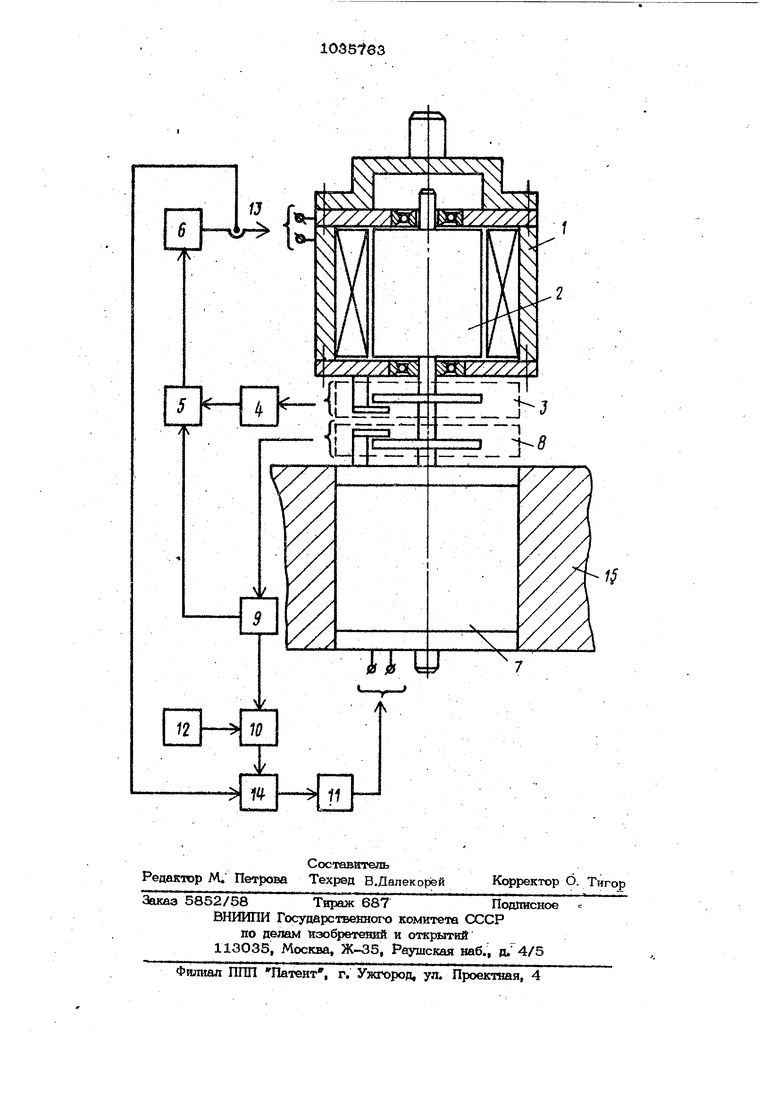
Введение сигнала, пропорционального 5 ixjKy основного электродвигателя, в систему управления скоростью вспомогатель ного электродвигателя позволяет обеспе- одновременное изменеш-ie электромагнитного момента основного к вспомо Гзтегшного электродвигателей и тем самьм повышает динамическую точность стабилизации скорости врашения выходного вала, На чертеже представлена блок-схема предлагаемого устройства. Устройство содержит основной электродвигатель, состоящий из статора 1 и якоря 2, к котором} подключен блок регулирования, состоящий Из последовательно соедшгешшос нмщ.льсного датчика 3, фор мнрователя 4 импу пьсов, измерителя 5 фазового рассогласования и усилителя 6, вспомогательный электродвигатель, якорь 7 которого подключен к блоку регзлирования, состоящему из последовательно соединенных импульсного датчика 8, установленного на валу якоря 7 вспомогательного электродвигателя, формирователя 9 импульсов, измерителя 10 фазового рассогласования, усилителя 11 и задающего генератора 12, пoдк пoчeннoгo к измерителю Ю, якорь 7 вспомогательного электродвигателя боешшен с якорем 2 основного электродвигателя, им пульсный датчик 3 регулирования которого закреплен на его статоре 1, образующем выхошюй вал основного электродвигателя. Устройство содержит также последовательно соединенные датчик 13 тока якоря 7 и сумматор 14, второй вход которого соед1шен с выходом измерителя Ю, а выход сумматора 14 соедшадн со входом усилителя. Вспомогательный элект. родвигатель закреплен в станине 15, Устройство работает следующим образом. С задающего генератора 12 подается частота на вход измерителя 10 фазового рассогласования вспомогательного элект-роцвигателя. На другой вход измерителя 10 подается частота с формирователя 9, пропорциональная скорости вращения якоря 2 основного электродвигателя относительно неподвижной станины 15, Сигнал рассогласования по фазе между этими двумя частотами поступает через сумматор 14 на вход усилителя 11, где усиливается и подается на якорь 7 вспомогательного электродвигателя, обеспечивеш вращение якоря 2 основного электродвигателя синхронно с задакятсм генерато 1 ром 12, Для задания начальной частоты относительного вращения импульсного
датчика 3 | используется сигнал с выхода формирователя 9 импульсов в цепи офатной связи вспомогательного электродвигателя, который подается на вход измерителя 5 фазового рассогласования основного электродвигателя, на второй вход которого подается импульсный сигнал с формирователя 4 импульсов с частотой, пропорциональной относительной скорости вращения импульсного датчика 3. рассогласования по фазе между этими двумя частотами поступает на вход усилителя 6,. где усиливается и подается на якорь 2 основного электродвигателя, обеспечивая вращение незакрепленного статора 1 со скоростью, пропорциональной разности числа меток импульсных датчиков 3 и 8.
Измене1гае момента нагрузки на выходном валу устройства (например, увеличение) вызывает изменение скорости вращения основного электродвигателя, которое обрабатывается системой управления скоростью основного электродвигателя, изменяющей (увеличивающей) ток в цепи якоря 2 и электромагнитный момент. Таким образом, изменение момента нагрузки на валу устройства.передаэтся на вал вспомогательного электрозвигателя. Изменение (увеличение) тока в якоре 2 основного электродвигателя измеряется датчиком 13 тока и подается на вход сумматора 14 системы управления скоростью вспомогательного электродвигателя, что позволяет иа1 енить (увеличить) электромагнитный момент на валу этого электродвигателя, тем самым упреждая изменение его скорости, необходимою для срабатывания системы управления. Таким образом, введение в систему управления скоростью вспом.огательного электропвнгателя сигнала, пропорционального току основного электродвигателя, i повышает томность преплагаемого устройства при ипмонеиии момента нагрузки.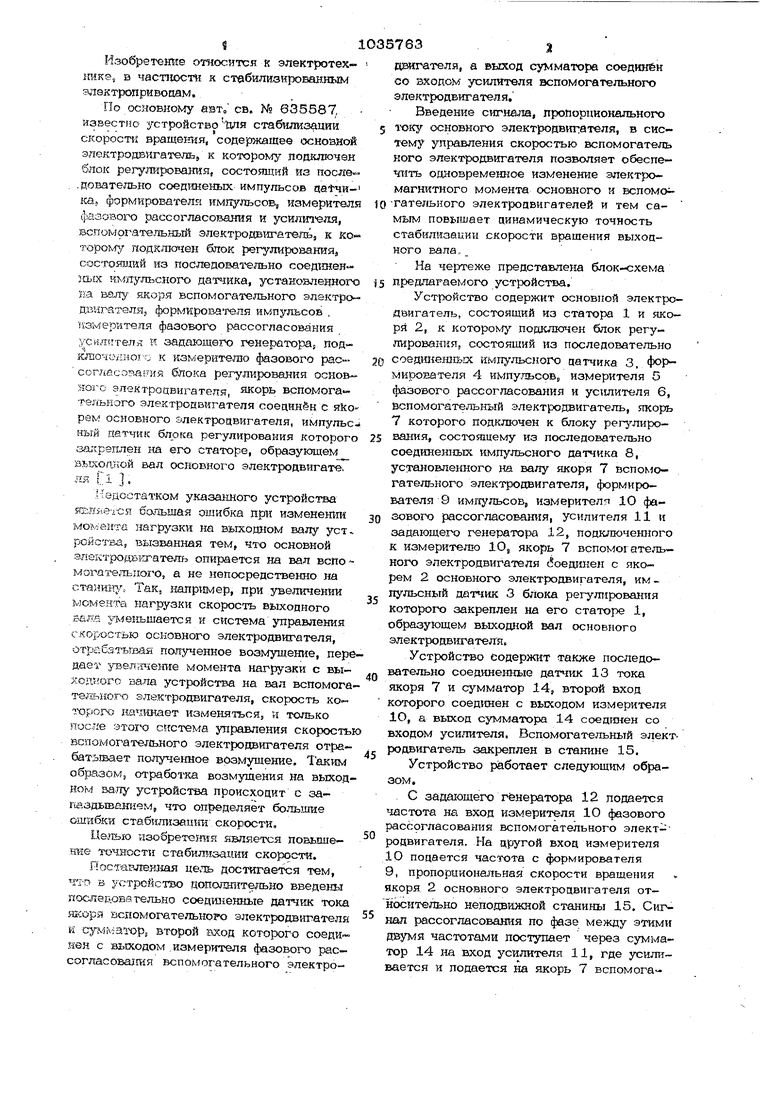
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости вращения | 1977 |
|
SU635587A1 |
| Устройство для стабилизации скорости вращения вала | 1981 |
|
SU1035762A1 |
| Электропривод | 1984 |
|
SU1224940A1 |
| Устройство для стабилизации скоростиВРАщЕНия элЕКТРОпРиВОдА | 1979 |
|
SU811469A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Электропривод постоянного тока | 1981 |
|
SU978304A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Реверсивный электропривод постоянного тока | 1979 |
|
SU1056930A3 |
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ по авт. св.. 635587, о т л и ч а ю щ е е с я тем, что, с целью повышения точности стабилиоацни скорости, в него дшолнительно. введены последсшательно соединенные датчик тока якоря вспомо гательного электродвигателя и сумматор, второй вход которого соединен с вьосодс : измерителя фазового рассоглабования 1 вспомогательногчэ электродвигателя, а выход сумматора соединен со входом усилителя вспомогательного электродвига теля.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для стабилизации скорости вращения | 1977 |
|
SU635587A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
