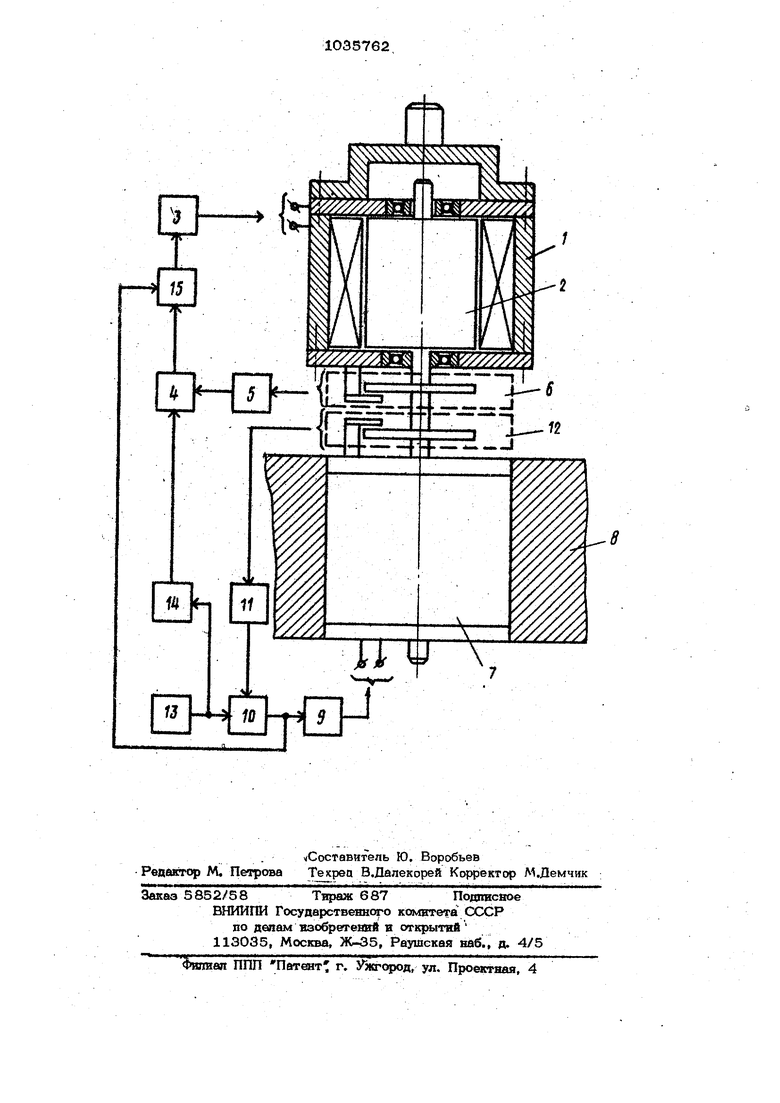
1 Изобретение относится к эпектротезснкке, в частности к стабилизированным эпектроприводам, имекшшм низкие и сверХ : низкие скорости врашения. Известно устройство ддя стабилизации скорости вращения, содержащее вспомогательный двигатель для увеличения частоты поступления информации. Вспомогательный двигатель приводит во вращение модуляруюший диск второго датчика , который имеет большее (тши меньшее) чиспо меток, чем диск датчика скорости основного двигателя. Кроме этого, для устранения влияния колебаний скорости вра.щения вспомогательного двигателя на точность стабилизации скорости основного двигателя в качестве задающей частоты для основного электропривода используется частота следования импульсов с датчика скорости вспомогательного двигателя Cl ., Основным недостатком известного устройства является наличие нелинейной характеристики момента трения в опорах основного двигателя, что не Позволяет получить скорости вращения ниже критической скорости. Наиболее близким по технической сущности к изобретению является устройство для стабилизации скорости вращения вала, содержащее основной двигатель, статор которого образует выходной ъап, устройства, а якорь подключен к выходу усилителя вход которого связан с последовательно , соединенными измерителем фазового рассогласования, формирователи импульсов, импульсным датчиксж скорости, сочлененным со статором основного двигателя, вспомогательный двигатель, статор которого закреплен в неподвижной станине, а его якорь сочленен с якорем основного двигателя и подключен к последовательно соединенным вторым усилителю, измерителю фазового рассогласования, формирователю импульсов, импульсному датчику скорости, сочлененному с якорем вспомогательного двигателя, второй вход второго измерителя фазового рассогласования соединен с задающим генератором 21 . Однако данное устройство имеет узкий диапазон рехулирования скорости, не позволяет осуществить реверс направления вращения, позиционирование и не обеспечивает плавную регулировку скорости в широком диапазоне скоростей. Направление вращения и диапазон регулирования скорости в этом устройстве задается соотно |шением числа меток датчиков обратной 1СВЯЗИ основного и вспомогательного двига 7622 тотей, и для получения штфокого диапазона регулирования скорости требуется набор прецизионных дисков для датчиков обратг ной связи с разным числом меток. Целью изобретения является расширение диапазона регулирования скорости вращения выходного вала устройства. Поставленная цель достигается тем, что в устройство для стабилизации ско вращения вала, содержащее основной двигатель , статор которого образует выходной вал устройства, а якорь подключен « выходу усилителя, вход которого связан с последовательно соединенными измерителем фазового рассогласования, формирователем импульсов, импульсным датчиком скорости, сочлененным со статором основного двигателя, вспомогательный двига- тель, статор которого закреплен в неподвижной станине, а якорь. сочленен с якорем основного двигателя и подключен к последовательно соединенным вторым усилителю, измерителю фазового рассогласования, формирователю импульсов, импульс У датчику скорости, сочлененном с якорем вспомогательного двигателя, второй вход второго измерителя фазового рассогласования соединен с задающим генератором, введен синтезатор частоты и Р этом вход синтезатора частоты соединен с выходом задающего генератора, а выход - со вторым входом первого измерителя фазового рассогласовйния, выход которого через сумматор соединен с первым усилителем, второй вход сумматора соединен с выходом второго иамерт-еля фазового рассогласования. На чертеже представлена блок-схема устройства. Устройство содержит основной двигатель, статор 1 которого образует выходной вал устройства, а якорь 2 подключен к выходу усилителя 3, вход которого связан с последовательно соединенными измерителем 4 фазового рассогласования. формирователем 5 импульсов, импульсным датчиком 6 скорости, сочлененным со статором 1, вспомогательный двигатель 7, статор которого закреплен в неподвижной станине 8, а его якорь сочленен с яко-;р&л 2 и подключен к послеаоватепьно соединенным усилителю 9, измерителю 10 фазового рассогласования, формирователю 11 импульсов, импульснсму датчику 12 скорости, сочлененному с якорем вспомогатепьного двигателя 7, второй вход измерителя 10 соединен с задающим генератсром 13, синтезатор 14 частоты и сумматор 15, Входсинтезатора 14 соединен с выходом задающего генератора 13, |а выход - со вторым входом измерителя 4 выход которого через сумматор 15 соединен с усилителем 3, Второй вход сумматора 15 соединен с выходом измерите-ля 10.
Устройство работает следующим образом.
С задающего генератора 13 подается частота на первый вход измерителя 10 фазового рассогласования вспомогательного двигателя 7. На другой вход измерителя 1О подается частота с формирователя 11 импульсов, пропорциональная скорости вращения якоря вспомогательного двигателя 7 и скорости вращения якоря 2 основного двигателя относительно неподвижной станины 8. Сигнал рассогласования по фазе между этими двумя частотам .усиливается усилителем 9 и подается на якорь вспомогательного двигателя 7, обеспечивая вращение якоря вспомогательного двигателя 7 синхронно с задающим генератором 13.
На первый вход измерителя 4 рассогласования подается частота с формирователя 5 импульсов, пропорциональная скорости врашения статора 1 основного двигателя относительно его якоря 2. На второй вход измерителя 4 поступает частота с выкопа синтезатора 14 частоты, в К раз отличающаяся от частоты задающего генетарора 13 и синхронизированная с ней, причем коэффициент передачи синтезатО ра 14 частоты может принимать практически любое значение. Сигнал рассогласо.вания по фазе между этими двумя частотами с выхода измерителя 4 рассогласова-. ния поступает на вход сумматора 15, где складывается с ощибкой С1шхрош1зацш1 вспомогательного двигателя 7, поступаюшей на другой вход сумматора 15 с выхода измерителя 10 рассогласования, чем достигается компенсация колебаний мгно венной скорости вспомогательного двигателя 7. Суммарный сигнал усиливается усилителем 3 и подается на якорь 2 основного двигателя, обеспечивая вращение статора 1 основного двигателя синхронно с частотой синтезатора 14 частоты.
Таким образом, скорость вращения Лх статора 1 относительно его якоря 2 в К раз отличается от скорости вращения иь якоря вспомогательного двигателя 7. Поскольку для получения низких скоростей вращения выходного вала устройства статор 1 основного двигателя должен вращаться относительно станины в хфогивоположную сторону по сравн шю с якорем вспомогательного двигателя 7, то скорост .выходного вала устройстваопределяется (при равном числе меток импульсных датчиков 6.и 12) из выражения
)2-UJi UJ2-l uJ2 U)2 (f-KK
Из представленного выражения очевипнр что, меняя коэффициет- передачи К синтезатора 14 частоты, можно обеспечить реверс направления врашения, позиционироEkSirae и плавную регулировку скорости выходного вала устройства в щироком диапазоне скоростей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости вращения | 1981 |
|
SU1035763A2 |
| Устройство для стабилизации скорости вращения | 1977 |
|
SU635587A1 |
| Устройство для стабилизации скоростиВРАщЕНия элЕКТРОпРиВОдА | 1979 |
|
SU811469A1 |
| Электропривод | 1984 |
|
SU1224940A1 |
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
| Устройство для стабилизации скорости электродвигателя | 1972 |
|
SU498700A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| Электропривод постоянного тока | 1981 |
|
SU978304A1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Электропривод постоянного тока | 1986 |
|
SU1539946A1 |
УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ ВАЛА, со держащее основной двигатель, статор ко торого образует выходной вал устройства, а якорь подключен к выходу усилителя, вход связан с последовательно соещщенными изм эитепем фазового рассогласования, формирователем импульсов, импульсным датчиком скорости, сочлененным со статором основного двигателя. .вспомогательный двигатель, ста1ч: которо:ГО закреплен в неподвижной станине, а его яко|ж сочленен с якорем основжя о двигателя и подключен к последовательно соединенным втсрым усилителю, измерителю фазового рассогласования, фор с атепю импульсов, импульснстлу датчику скорости, сочлененному с якорем вспомогательного двигателя, второй вход второго И:я ерителя фазового рассогласования сое данен с задающим генератором, отличающеес я тем, что, с целью расширения диапазона регулирования скорости выходного вала, в устройство введен синтезатс частоты и сумматор, при этом вход синтезатора I частоты с оеаинен с выхоИом запающего ге- и нёратора, а выход - со вторым входом первого измерителя фазового рассогласо- jf/J вания, вьтход которого через сумматор coeLppMi динен с первым усилителем, второй вход р сумматора соединен с выкоИом вго- д рого измерителя фазового рассогла- сования.:
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для стабилизации скорости вращения | 1977 |
|
SU635587A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
