(5) ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
| Устройство для стабилизации скорости вращения | 1977 |
|
SU635587A1 |
| Устройство для стабилизации скоростиВРАщЕНия элЕКТРОпРиВОдА | 1979 |
|
SU811469A1 |
| Устройство для стабилизации скорости электродвигателя | 1972 |
|
SU498700A1 |
| Устройство для стабилизации скорости вращения вала | 1981 |
|
SU1035762A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для стабилизации скорости вращения | 1981 |
|
SU1035763A2 |
| Двухдвигательный электропривод с механическим дифференциалом | 1973 |
|
SU866678A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
1
Изобретение оУноситея к электротехнике и может быть использовано в системах стабилизации низких скоростей вращения.
Известен электропривод постоянного тока, в котором -изменение направления вращения обеспечивается за -счет использования реверсивного силового преобразователя, подключенного к обмоткам управления двигателя СП.
Однако это устройство не обеспечивает стабилизацию скорости в зоне малых скоростей вращения, что обусловлено наличием момента троения в подвижных элементах электропривода, имеющего нелинейную характеристику в зоне малых скоростей.
Наиболее близким по технической сущности к предлагаемому является электропривод постоянного тока, содержащий основной электродвигатель, статор которого является выходным валом устройства, и вспомогательный электродвигатель, имеющий с основным общий.ротор, основной и вспомогательный импульсные датчики частоты вращения, роторы которых закреплены на общем роторе электродвигателей, а считывающие элементы каждого датчика частоты - на статоре соответствующего электродвигателя ,, при этом выход вспомогательного датчика соединен с задающим входом
10 основного и входом обратной связи вспомогательного измерителей фазовог го рассогласования, выходы которых через усилители связаны с обмотками управления соответственно основного
15 и вспомогательного электродвигателей, а задающий вход вспомогательного измерителя фазового рассогласования подключен к выходу задаю20щего генератора.
В этом электроприводе импульсные датчики имеют различные количества меток, в результате чего статор основного электродвигателя вращается со скоростью, пропорциональной разности частот сигналов получаемых с основного и вспомогательного импульсных датчиков. В результате колебания скорости вращения вспомогательного электродвигателя передаются на колебания частоты основного датчика, что приводит к их взаимной компенсации в основном измерителе фазового рассогласования и устраняет влияние колебаний мгновен-ной скорости вращения вспомогательного электродвигателя на стабилизацию скорости вращения выходного вала устройства. Влияние нелинейно сти характеристики момента трения в подвижных элементах основного электродвигателя устраняется благодаря выбору соответствующей величины скорости вращения вспомогательного электродвигателя выше критической скорости движения 23.
Недостатком устройства является невозможность обеспечения реверсирования движения выходного вала устройства, так как направление вращени определяется соотношением числа меток импульсных датчиков частоты вращения основного и вспомогательного электродвигателей и не может быть изменено-в процессе работы устройства, что ограничивает функциональные возможности электропривода.
Цель изобретения - расширение фун кциональных возможностей за счет обеспечения реверсирования движения выходного вала устройства.
Поставленная цель достигается тем, мто в .устройство введены допол;нительный импульсный датчик .частоты вращения, ротор которого установлен на общем роторе электродвигателей а считывающий элемент - на статоре основного .электродвигателя, и блок реверса, соде;ржащии задатчик направления вращения, логическую схему НЕ, первую и вторую логические схемы И и логическую схему ИЛИ, при этом выход основного датчика частоты вращения подключен к первому входу первой схемы И, выход дополнительного датчика частоты вращения подключен к п.вому входу второй схемы И, а выходы вышеупомянутых схем И подключены к входам схемы ИЛИ, выход которой соединен с входом обратной связи измерителя фазового рассогласования основного блока регулирования, выход задатчика направления вращения соответственно непосредственно и через схе,му НЕ соединен с вторыми входами
|схем И, причем число меток, нанесенное на роторе основного датчика частоты вращения, больше,а на роторе дополнительного - меньше, чем число меток, нанесенных на роторе вспомогательного датчика частоты вращения.
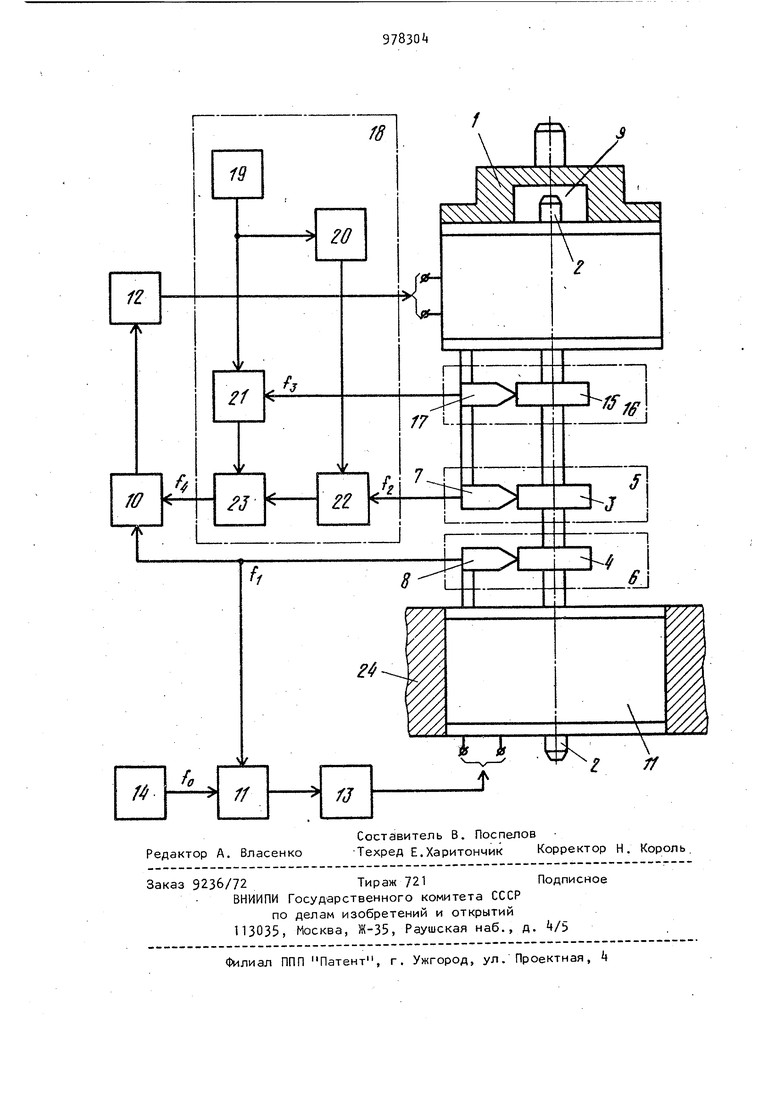
На чертеже представлена схема эле ктропривода.
Электропривод содержит основной электродвигатель, статор 1 которого
5 является выходным валом устройства, вспомогательный электродвигатель, имеющий общий ротор 2 с основным электродвигателем. На общем роторе , 2 электродвигателей закреплены роторы 3 и 4 основного 5 и вспомогательного 6 импульсных датчиков скорости вращения, считывающие элементы 7 и 8 которых закреплены соответственно на статоре 1 основного и
5 статоре 9 вспомогательного электродвигателей. Выход вспомогательного импульсного датчика 6 соединен с задающим входом основного измерителя 10 фазового рассогласования и входом обратной связи вспомогательного измерителя 1.1 фазового paccor.iiaсования, выходы которых через усилители 12 и 13 связаны с обмотками управления основного и вспомогательного электродвигателей. Вход вспомогательного измерителя 11 рассогласования подключен к выходу задающего генератора 14. На общем роторе 2 электродвигателей закреплен также ротор 15 дополнительного импульсного датчика 16 частоты вращения, считывающий элемент 17 которого установлен на статоре 1 основного /электродвигателя. Блок реверса 18 содержит задатчик 19 направления вращения, логические схемы НЕ 20, первую 21 и вторую 22 логические схемы И и логическую схему ИЛИ 23. Выход основного датчика 5 частоты вращения подключен к первому входу первой схемы И 21 , выход дополнительного датчика 16 - к первому входу второй схемы И 22, выходы схем И 21 и 22 подключены к входам схемы ИЛИ 23, выход которой соединен
с входом обратной связи основного измерителя 10 фазового рассогласования. Статор 9 закреплен на неподвижном основании 2. Датчик 6 имеет число меток на роторе Z., датчик 5 - (Z + , а датчик 16 - (). Устройство работает следующим образом, С генератора 1А на задающий вход измерителя 11 фазового рассогласования поступают импульсы с частотой f, на вход обратной связи - им пульсы с датчика 8, частота которых равна f 7 2Л где Z-- число меток датчика 6; частота вращения ротора 2 . На задающий вход измерителя 10 фазового рассогласования подается выходной сигнал датчика 6, имеющий частоту f , а на вход обратной свя зи - выходной сигнал схемы ИЛИ 23, имеющий частоту ее входного сигнала. Задатчик 19 направления вращения представляет собой логическое устройство, и его выходной сигнал может, принимать значение Л или О При наличии на выходе задатчика 19 направления вращения уровня О выходной сигнал логической схемы НЕ 20 принимает значение 1, что обеспечивает прохождение через схему И 22 и схему ИЛИ 23 выходного сигнала датчика 5. имеющего часто. Vjfiz..z,). ,где uJ/ji - частота вращения ротора 2 относительно статора {Z +/jZ2)- число меток датчика 5. При наличии на выходе задатчика 19 направления вращения уровня 1 обеспечивается прохождение через схему И 21 и схему ИЛИ 23 выходного сигнала датчика 1б, имеющего частоЬ 2 {2,д1з), где () - число меток датчика 1б. Таким образом, в зависимости от выходного сигнала задатчика 19 направления вращения частота на выходе схемы ИЛИ 23 равна частоте е или f В режиме фазовой автоподстройки поддерживается равенство входных ча тот измерителей 10 и 11 фазового ра согласования, т.е. fp f f или fo 1 f.. Частота ujg вращения статора 1, являющегося выходным валом устройства, относительно неподвижного основания равна разности частоты LO,, вращения ротора 2 относительно основания 2.k и частоты u)2 еращениа ротора 2 относительно статора 1, т.е. ,,. В зависимости от выходного сигнала задатчика 19 направления вращениягл{„ n TJ , . 2дг 4л22) 2,-42, ,Az,) o--z: Таким образом, при смене значения выходного сигнала задатчика- 19 направления вращения происходит реверс выходного вала электропривода. При фиксированном значении частоты задающего генератора И f в общем случае частота вращения выходного вала в прямом и обратном направлениях вращения не равны между собой, при u2.«Z ,С, , и можно обеспечить равенство частот вращения в прямом и обратном направлениях. Формула изобретения Электропривод постоянного тока, содержащий основной электродвигатель, статор которого является выходным валом устройства и вспомогательный электродвигатель, имеющий с основным общий ротор, основной и вспомогательный импульсные датчики частоты вращения, роторы которых выполненф.1 с различным числом меток и закреплены на общем роторе электродвигателей, а считывающий элемент каждого импульсного датчика частоты на статоре соответствующего электродвигателя, прк этом выход вспомогательного датчика соединен с задающим входом основного и входом обратной связи вспомогательного измерителей фазового рассогласования, выходы которых через усилители связ.аны с обмотками управления соответственно основного и вспомогательного электродвигателей, а задающий вход вспомогательного измерителя фазового рассогласования подключен к выходу задающего генератора, о т личающийся тем, что, с целые расширения функциональных возможностей за счет обеспечения реверсирования движения выходного вала устройства, в него введены дополни тельный импульсный датчик,частоты вращения, ротор которого установлен на общем роторе Электродвигателей, а считывающий элемент - на статоре основного электродвигателя, и блок реверса, содержащий задатчик направ ления вращения, логическую схему НЕ, первую и вторую логические схемы И и логическую схему ИЛИ, при этом выход основного датчика частоты вращения подключен к первому входу первой схемы Mj выход дополнительного датчика частоты вращения подключен к первому входу второй схемы И, а выходы вышеупомянутых схем И подключены к входам схемы ИЛИ, выход которой соединен с входом обратной связи основного измерителя фазового рассогласования , выход задатчика направления вращения соответственно непосредственно и через схему НЕ соединен с вторыми входами схем И, причем число меток, нанесенное на . роторе основного датчика частоты вращения, больше, а на роторе дополнительного - меньше , чем число меток, нанесенное на роторе вспомогательного датчика частоты вращения. Источники информации, ринятые во внимание при экспертизе 1. Авторское свидетельство СССР , кл. Н 02 Р 5/16, 1978. 2. Авторское свидетельство СССР , кл. Н 02 Р 5/ОЬ, 1975.
