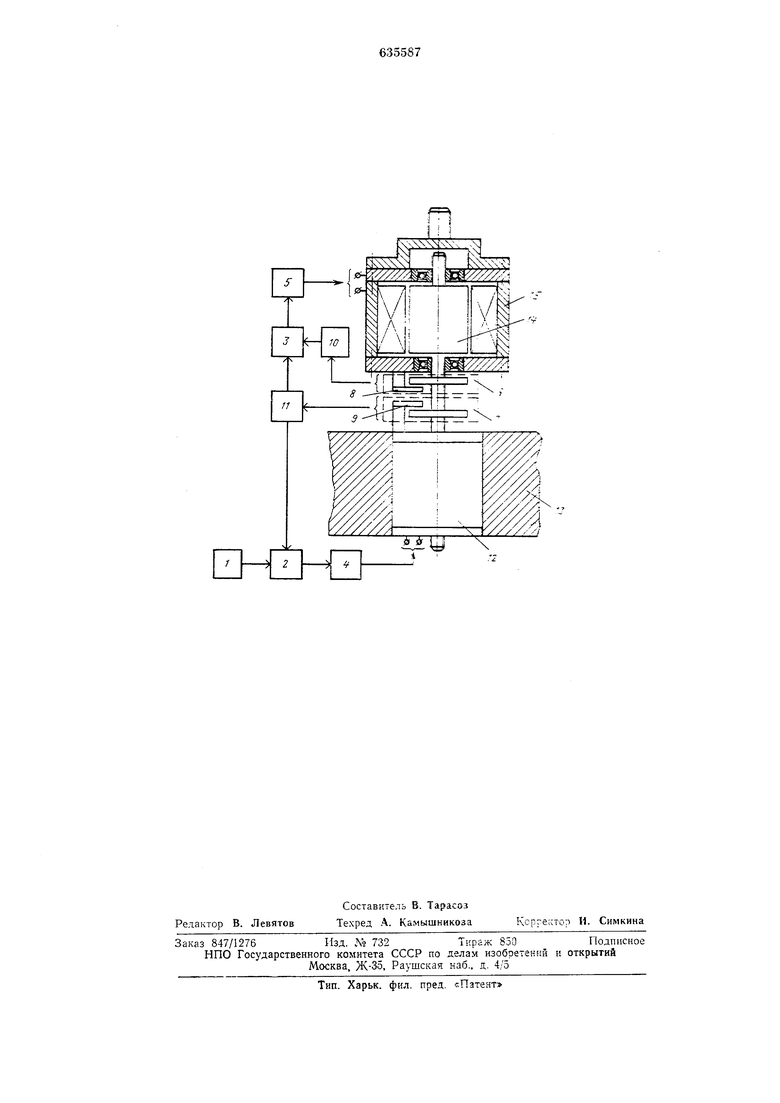
Изобретение относится к электротехнике, в частности к стабилизированным электроприводам, имеющим низкие скорости вращения. Известно устройство для стабилизации скорости вращения электродвигателя, ностроенное но принципу фазового управления и содержащее измеритель фазового рассогласования, усилитель мощности, импульсный датчик обратной связи по скорости вращения и двигатель постоянного тока 1. Недостаток }-стройства состоит в том, что на низкой частоте врап1ения из-за редкой частоты поступления информации о положении ротора трудно обеспечить высокую стабилизацию скорости. Из известных устройств наиболее близким к предложенному по технической сущности является устройство 2, в котором применен дополнительный модулирующий двигатель с целью увеличения частоты поступления информации. Кроме того, для устранения влияния колебаний скорости вспомогательного двигателя на точность стабилизации скорости вращения основного двигателя в области низких скоростей, выход формирователя, подключенный на вход обратной связи измерителя фазового рассогласования вспомогательного двигателя, подключен таюке на задающни вход нзмер;1теля рассогласования основного электродвигателя, а вход указанного формирователя подключен к дополнительному датчику скоростп, установленному на валу вспомогательного двигателя и имеющему больщее, чем у первого датчика скорости, ч;1сло меток. Целью 1 зобретения является расширение диапазона регулирования скоростп вращения электродвигателя. Поставленная цель достигается тем, что якорь вспомогательного электродвигателя соединяется с якорем основного электродвигателя имиульсный датчик блока регулироваиия которого закренляется на статоре основного электродвигателя, а статор основого электродвигателя является выходным валом устройства. На чертеже представлена блок-схема устройства. Устройство стабилизации скорости вращения двигателя содержит задающий генератор /, измерители фазового рассогласования 2 и 3, усилители 4 и 5, импульсные датчики угловой скоростп вращенпя 6 и 7, считывающие устройства 8 и 9 формирователи имиульсов W и П, всиомогательный электродвигатель 12, закрепленный в
станине 13 основной двигатель, имеющий якорь 14 и статор 15.
С задающего генератора / подается частота на вход измерителя фазового рассогласования 2 вспомогательного электродвигателя 12. На другой вход измерителя подается частота с формирователя импульсов //, пропорциональная скорости вращения якоря вспомогательного электродвигателя и скорости вращения якоря 14 основного электродвигателя относительно непОлДвижной станины 13. Сигнал рассогласования по фазе между этими двумя частотами усиливается усилителем 4 и подается ка якорь вспомогательного электродвигателя }2, обесиечивая вращение якоря основного двигателя синхронно с генератором 1. Для задания начальной частоты относительно вращения импульсного датчика 6 с выхода формирователя импульсов // в цепи обратной связи вспомогательного двигателя импульсный сигнал подается на вход измерителя фазового рассогласования 3 основного двигателя, на второй вход которого подается импульсный сигнал с формирователя импульсов 10 с частотой, пропорциональной относительной скорости вращения импульсного датчика 6. имеющего меньшее (или большее, в зависимости от требуемого направления вращения статора 15 основного двигателя) количество меток.
Из-за разности частот импульсных снгналов с импульсных датчиков 5 и 7 на выходе измерителя фазового рассогласования 3 появится наиряжение, которое усиливается усилителем 5 и поступает на якорь 14 двигателя. Ток, протекающий ио обмотке якоря 14 основного двигателя, создаёт электромагнитный момент между якоре;д 14 и статором 15 такого направления, чтобы незакрепленный статор 15, начав вращаться, скомпенсировал имеющуюся разность частот на входе измерителя фазозого рассогласования 3.
Таким образом, статор основного двигателя будет вращаться со скоростью, пропорциональной разности частот сигналов. получаемых с импульсных датчиков 6 к 7. Колебания мгновенной скорости вращения вспомогательиого двигателя 12 будет передаваться и на колебания частоты импульсного датчика 6 основного двигателя, что приводит к их взаимной компенсации в
измерителе фазового рассогласования 3 основного двигателя. Влияние нелинейной характеристики момента трения в опорах основного двигателя и щеточном аппарате устраияется за счет выбора соответствующей скорости вращения .вспомогательного двигателя выше критической скорости движения.
Использование вспомогательного двигателя для вращения якоря основного двигателя выгодно отличает предлагаемое устройство, так как практически всегда позволяет получить какие угодно низкие скорости вращения за счет устранения влияния
нелинейности момента трения.
Форм л а л 3 о б р е т е н к я
Устройство для стабилизации скорости
вращения, содержащее основной электро,двигатель, к котором} подключен, блок регулирования, состоящий из последовательно соединенных имп льсного датчика, формирователя импульсов, пзмерителя фазовото рассогласования и усилителя, вспомогательный электродвигатель, к которому подключен блок регулирования, состоящий из последовательно соединенных имиульсного датчика, установленного на валу якоря
вспомогательного электродвигателя, формирователя импульсов, измерителя фазового рассогласования, усилителя и задающего генератора, иодключенного к измерителю фазового рассогласования, формирователь импульсов блока регулирования вспомогательного электродвигателя соединен с измерителем фазового рассогласования блока регулирования основного электродвигателя, отличающееся тем, что,
с целью расширения диапазона регулирования скорости, якорь вспомогательного электродвигателя соединен с якорем основного электродвигателя, импульсный датчик блока регулирования которого закреплен
на его статоре, образующем выходной вал основного электродвигателя.
Источники информации, принятые so внимание при экспертизе:
1. Авторское свидетельство СССР
Л 299930, кл. Н 02 Р 5/16, 1969.
2. Авторское свидетельство СССР Ло 498700, Н 02 Р 5/06, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости вращения вала | 1981 |
|
SU1035762A1 |
| Устройство для стабилизации скорости вращения | 1981 |
|
SU1035763A2 |
| Устройство для стабилизации скоростиВРАщЕНия элЕКТРОпРиВОдА | 1979 |
|
SU811469A1 |
| Устройство для стабилизации скорости электродвигателя | 1972 |
|
SU498700A1 |
| Стабилизированный по скорости электропривод | 1980 |
|
SU964946A1 |
| Электропривод постоянного тока | 1981 |
|
SU978304A1 |
| Электропривод | 1984 |
|
SU1224940A1 |
| Устройство для стабилизации скорости электродвигателя | 1982 |
|
SU1035764A2 |
| Устройство для автоматического контроля вязкости | 1979 |
|
SU789703A1 |
| Электропривод | 1983 |
|
SU1107241A1 |