:о vj
О
:л
Изобретение относится к манипуляторостроению.
По основному &ВТ.СВ. № 779063 известен манипулятор, содержащий основание, кинематически связанное с механической рукой, приводные двигатели,дифференциальный механизм с коническими шестернйми l .
Недостатком известного манипулятора является то, что при повороте руки может происходить само- . произвольный поворот руки манипулятора, что снижает надежность в работе.
Цель изобретения - повышение надежности работы манипулятора.
Цель достигается тем, что манипулятор снабжен тягой и механизмом синхронизации вращения валов приводных двигателей, выполненным в виде полото вала с жестко насаженными на него парой конических шестерен, между которыми установлены подпружиненные фрикционные конические муфты, и расположенной с возможностью перемещения шпонкой, связанной с тягой, размещенной в полости вала, причем полый вал механизма син хронизадии связан с коническими шестернями дифференциального механизма.
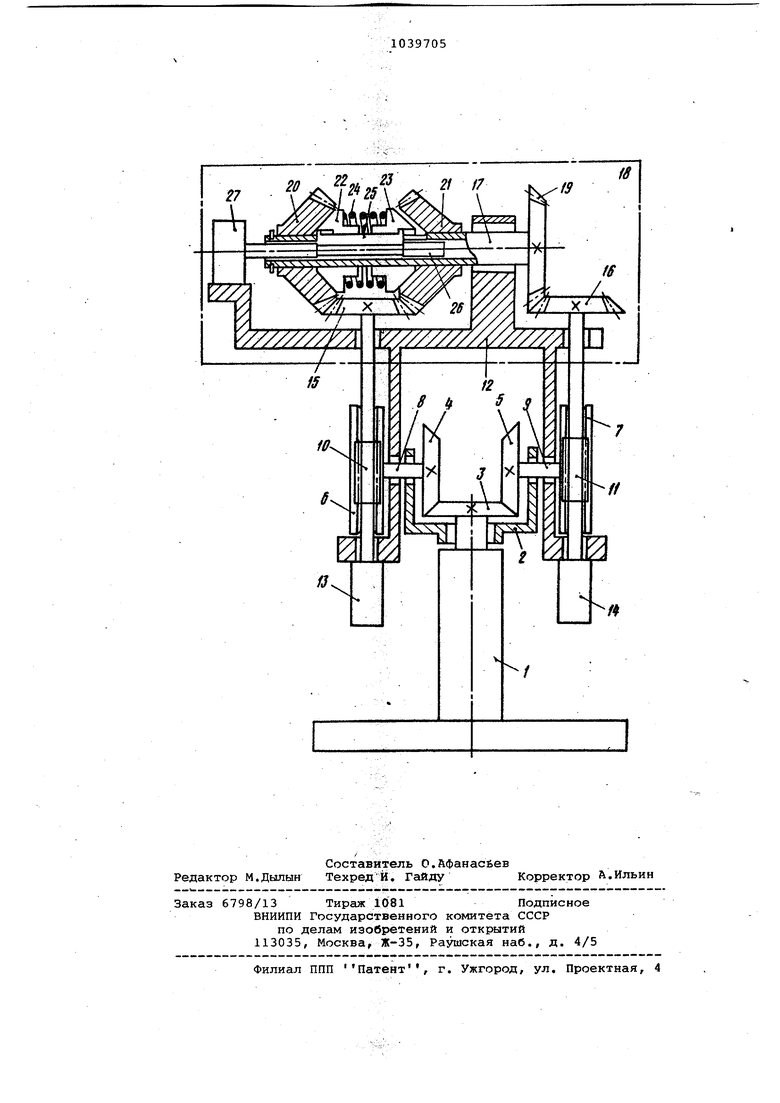
На чертеже изображен манипулятор поперечный разрез
Манипулятор содержит основание 1 на котором установлена, поворотная вилка 2 и дифференциальный механизм с неподвижным солнечным колесом 3 и сателлитами 4 и 5, связанными с червячными колесами 6 и 7 при помощи валов 8 и 9. Червяки 10 и 11 закреплены на подвижном корпусе 12 манипулятора. Валы связаны с двигателями 13 и 14, а на противоположных концах червячных валов установлены конические шестерни 15 и 16, связанные с полым валом 17 синхронизатора 18, который состоит из жестко закрепленной на валу шестерни 19, из двух сидящих конических шестерен 20 и 21, которые передают вращение на полый вал 17 с помощью двух.фрикционных конических муфт 22 и 23 разжимаемых пружиной 24 и
подвижной шпонкой 25, приводимой в движение через тягу 26 приводом 27.
Манипулятор работает Следующим образом.
При вращении двигателей 13 и 14 в
одну Сторону соответственно вращаются червяки 10 и 11, при этом червячные колеса 6 и 7 стоят на месте, так как заклинены конические колеса 4 и 5,.и червяки 10
и 11 обкатываются вокруг червячных колес б и 7, осуществляя качательное движение корпуса 12. В это время у синхронизатора 18 в зацеплении работает шестерня 20, к
которой поджата фрикционная муфта 22 пружиной 24, а муфта 23 отжата подвижной шпонкой 25, двигатели 14 и 13 при этом кинематически связаны и совершают одинаковое число обо- .
ротов. Для осуществления вращения двигателей 13 и 14 в разные стороны необходимо предварительно подключить муфту 23 к шестерне 20, для этого подвижная шпонка 25 перемещается.приводом 27, отпуская пружину 24, при этом муфты 22 и 23 жестко фиксируют обе шестерни 20 и 21, а значит и оба двигателя 13 и 14. Затем привод 27 перемещает подвижную-шпонку 25, котораяотжимает муфту 22 от конической шестерни 20. При включении двигатели 13 и 14 вращаются в разные стороны и с равным числом оборотов, вращение передается через червяки 10 и 11,
червячные колеса 6 и 7 на конические шестерни 4 и 5, которые обкатывая солнечное колесо 3, осуществляют поворот корпуса 12. , Использование предлагаемого манипулятора в сравнении с известным повышает надежность работы манипулятора вследствие исключения возможности вращения двигателей с разными) скоростями за счет введения синхрониз&тора,
|И устраняет самопроизвольное опускание руки при повороте или самопроизвольный поворот при качательном движении руки. Это позволяет получать стабилвнае траектории движения руки, вследствие чего повышается надежность
|работы манипулятора, расширяется сфера его применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Приспособление для навивки пружин к токарному станку | 1988 |
|
SU1639849A1 |
| ФРЕЗЕРНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ ЛОПАСТЕЙ ГРЕБНЫХ ВИНТОВ | 1946 |
|
SU69470A1 |
| Канатный привод цепной пилы | 1985 |
|
SU1283391A1 |
| ЛЕБЕДКА | 2004 |
|
RU2268235C2 |
| МЕХАНИЗМ ПОВОРОТА БАШНИ | 1992 |
|
RU2054154C1 |
| Устройство для поддержания постоянства скорости двух двигателей | 1940 |
|
SU62355A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Станок для холодного накатывания зубчатых профилей | 1988 |
|
SU1780910A1 |
| Захват промышленного робота | 1985 |
|
SU1310202A1 |
| Манипулятор | 1988 |
|
SU1590370A1 |
МАНИПУЛЯТОР по авт. csS, j №779063,0 т л ичаю щи и ся тем,что|. I с цельк) повьшения надежности работы, он Снабжён тягой, механизмом синхронизации, вращения валов приводных двигателей, выполненным в виде пдлого вала с жестко насаженными на него парой конических шестерен, межДу которыми установлены подпружиненные фрикционные конические муфты, и расположенной с возможностью перемещения шпонкой, связанной с тягой, размещенной в полости вала, причем полый вал механизма синхронизации связан с коническими шестернями дифференциального механизма.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU779063A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
