(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU891425A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Манипулятор | 1982 |
|
SU1039705A2 |
| Манипулятор | 1984 |
|
SU1177149A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1988 |
|
SU1548034A1 |
| Промышленный робот | 1978 |
|
SU847617A1 |
| Автоматический манипулятор с программным управлением | 1980 |
|
SU906684A1 |
I
Изобретение относится к манипуляторостроению и может быть использовано во всех областях техники.
Известен манипулятор, содержащий основание, кинематически связанное с механической рукой, несущей кисть, а также привод и дифференциальный механизм 1.
Недостатком известного манипулятора является то, что он не обеспечивает движения в плоскостях продольных осей основания, что ограничивает его технологические возможности.10
Цель изобретения - расщирение технологических возможностей манипулятора.
Указанная цель достигается тем, что рука манипулятора выполнена в виде двух щарнирно связанных между собой звеньев, имеющих форму вилки, причем одно из них шарнирио связано с основанием, на котором неподвижно смонтировано сол нечное колесо дифференциального механизма, а второе - с шестернями того же механизма. .
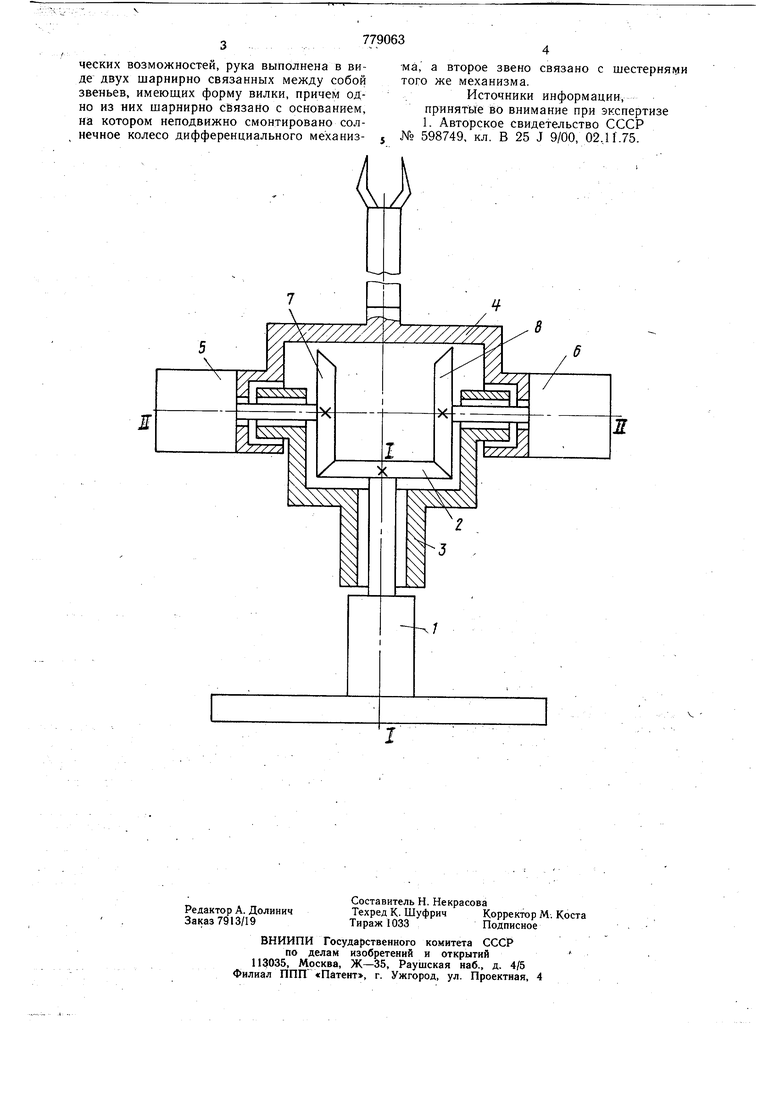
На чертеже схематически изображено 20 приводное устройство. Рука поднята в вертикальное положение., ,
Манипулятор имеет основание 1,на котором жестко закреплено солнечное колесо 2.
Звено 3 руки, несущее кисть, шарнирно связано с основанием 1 и звеном 4 руки, на котором установлены.-приводные двигатели 5 и. 6, кинематически связанные с щестернями 7 и 8 дифференциального механизма.
Манипулятор работает следующим образом.
При вращеиии приводных двигателей 5 и 6 в одну сторону щестерни 7 и 8,связанные с приводными двигателями 5 и 6, обкатываясь вокруг солнечного колеса 2, поворачивают звено 4 руки относительно оси 1 - 1. При вращении приводных двигателей 5 и 6 в разные стороны щестерни 7 и 8 не вращаются, а звено 4 руки с установленными на нем двигателями 5 и 6 соверщает качательное движение относительно оси И- II.
Формула изобретения
Манипулятор, содержащий основание, кинематически связанное с механической рукой, несущей кисть, а также привод и дифференциальный механизм, отличающийся тем, что, с целью расширения технологических возможностей, рука выполнена в виде двух шарнирно связанных между собой звеньев, имеющих форму вилки, причем одно из них шарнирно связано с основанием, на котором неподвижно смонтировано солнечное колесо дифференциального механизма, а второе звено связано с шестернями
того же механизма.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
№ 598749, кл. В 25 J 9/00, 02,11.75.
