Af
(/}
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2017 |
|
RU2648516C1 |
| Астатическая система регулирования | 1978 |
|
SU842708A1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2571371C2 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Следящая система | 1980 |
|
SU1007082A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИ-ЗАКОНА РЕГУЛИРОВАНИЯ | 1995 |
|
RU2103715C1 |
| Непрерывный привод | 1981 |
|
SU964572A2 |
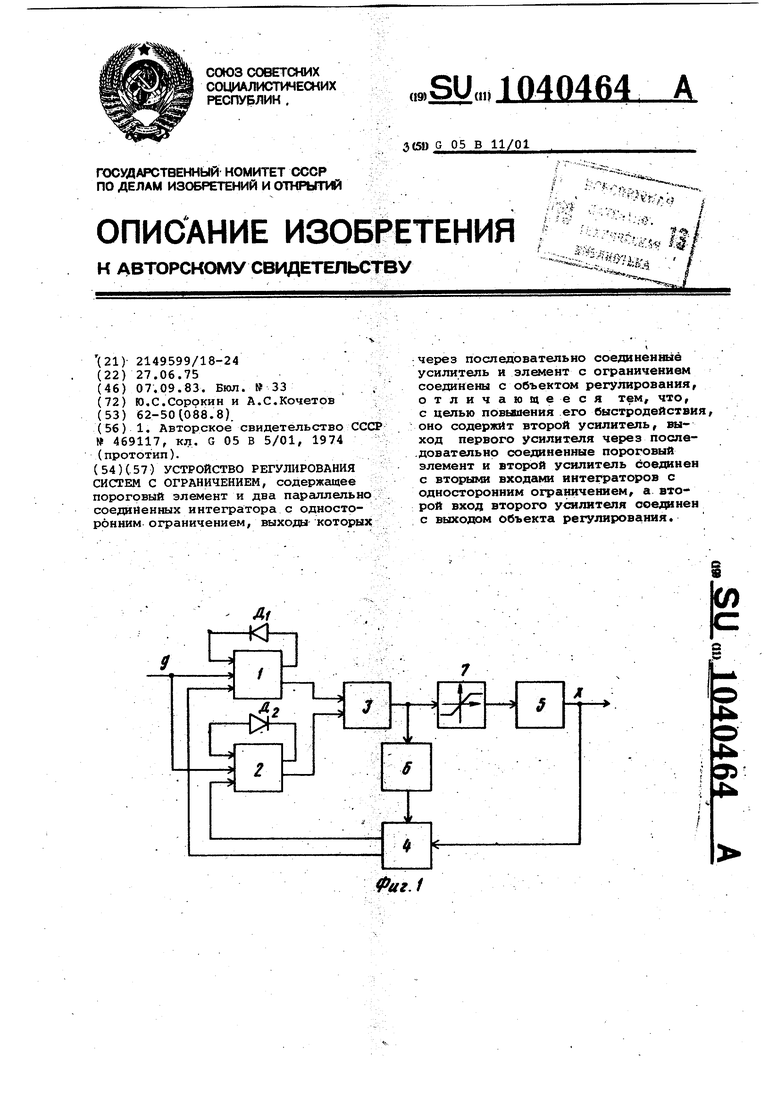
4i 4 Изобретение относится к системам автоматического управления, содержа щим элементы устройства) с ограничением, и может быть использовано в системах управления беспилотных летатель-ных аппаратов , псГдверженных .воздействию помех, амплитуды которых при суммировании с полезным сиг налом ограничиваются с насыщением (ограничением), например усилителямк с насыщением, приводами с ограничением как выходной величины, так и скорости ее изменения и др. Наиболее близким к предлагаемому является устройство, содержащее пороговый элемент и дв параллельно соединенных интегратора с односторонним ограничением, выходы которых через последовательно соединенные усилитель и элемент с ограничением соединены с объектом, регулирования, .Односторонеее ограничение каждог интегратора достигнуто путем в лючения диода в цепь его обратной свя зи. Поэтому на выходах интеграторов полярность сигналов никогда не меняется. Пороговый элемент реализован с помощью сравнивающего устройства на два входа, на один вход которого подключена цепь управлякяцего сигнала систе1«ы автоматического управления, а на другой - соответству щая клемма источника постоянного тока с нейтральной клеммой, причем сравнивающее устройство и интегратор выполнены на одном операционном усилителе. В случае превьаиения управляющим сигналом порогового значе ния , величина которого равна зоне ограничения элемента с ограничением, на. выходе сравнивающего устройства появляется сигнал, который интегрируется интегратором с рдно.рторанним ограничением. Так как; / интеграторы с односторонним ограничением обладают инвертирующим свойством, то проинтегрированный сигнал вычитается из управляющего сигнала, в результате чего объект регу лирования выходит из зоны ограничения раньше, чем в случае отсутствия этой формировки l . Недостаток известного устройства состоит в низком быстродействии. От цательное влияние ограничения ампли туды помехи на динамические свойств и устойчивость системы автоматиче™ ского управления компенсируется лишь после того, как сформируется формирующий фазовый сдвиг полезной составляющей управляющего сигнала н выходе устройства в течение несколь ких периодов ве изменения. Из-за низкого быстродействия известного устройства положительный эффект при его использовании возможен только для узкого класса условно устойчивы ,систем автоматического управления, годограф амплитудно-фазовой частотной характеристики которых на комилексной плоскости в разомкнутом их состоянии проходит вблизи и параллельно отрицательн.ой вещественной полуоси в окрестностях критической точки с координатами: -1, и 0. Кроме того, низкое быстродействие устройства ограничивает частотный диапазон изменения помехи, амплитуда которой подрезается. Частота помехи должна быть соизмерима с частотой изменения полезной составляющей управляющего сигнала систе№л автоматического управления. Только в этом., случае сформированный компенсирукяций формирующий сдвиг на выходе устройства может улучшить динамические свойства и устойчивость системы автоматического управления с ограт ничением, в которую включено известное устройство. . Если частота помехи; высокая, то сформированный формирую-щий фазовый сдвиг пренебрежимо мал и известное устройство не оказывает существенного положительного воздействия на систем автоматического управления с ограничением. Цель изобретения - повышение быстродействия устройства регулирования систем с ограничением. Указанная цель достигается тем, что устройство,содержащее пороговый элемент и два параллельно соединенных интегратора с односторонним ограничением, выходы котоЕих через последовательно соединенные усилитель и элемент с ограничением соединены с объектом регулирования, дополнительно содержит второй усилитель, выход первого усилителя через последовательно соединенные пороговый элемент и второй усилитель соединен с вторыми входами интеграторов с односторонним ограничением, а второй вход второго усилителя соединён с выходом объекта регулирования. Включение в контур регулирования двух параллельно соединенных между собой интеграто рв с односторонним ограничением фильтрует(сглаживает/ помеху практически любой частоты и предупреждает нежелательное явление ее подрезания элементами с ограничением системы автоматического Управления. При срабатывании порогового элемента увеличивается коэффициент передачи второго усилителя, за счет которого уменьшается величина перерегулирования и повышается быстродействие устройства регулирования системы.с ограничением. На фиг. 1 представлена функциональная схема устройства на фиг.2 осциллограммы переходных процессов. Устройство содержит интеграторы 1 и 2 с односторонним ограничением
в цепях обратной связи каждого из которых включен диод,- первый 3 и второй 4 усилители, объект 5 регулирования, пороговый элемент б, уро вень срабатывания которого равен заданному (допустимому) значению ошибки регулирования, элемент 7 с ограничением, например рулевой привод с ограничением либо выходной координаты, либо скорости ее изменения. Кроме того, на фиг. 2 обозначено: 8-10 - осциллограмма переход ных процессов.
Цепь выходного сигнала подключена к одним входам интеграторов 1 и 2 к другим входам которых подключен выход усилителя 4, коэффициент передачи которого изменяется с помощью порогового элемента б. Выходы интеграторов 1 и 2 через усилителе 3 соединены с входом порогового .эле- мента б и входом элемента 7 с огра ничением, выход которого через объект 5 регулирования подключен к входу усилителя 4. Элемент 7 с ограничением и объект 5 регулирования могут иметь свой замкнутый контур управления.
Устройство работает следующим образом. .
.Входной сигнал, состоящий из ПР лезной медленно изменяющейся, например, ступенчатой составляющей и быстро изменяющейся составлякяцей помеxk , поступает на входы интеграторов 1 и 2. В зависимости от полярности входного сигнала один из ийтеграторов интегрирует и накапливает сигнал, а другой в это время является элементом с нулевым коэффициентом передачи, так как в цепях обратных связей интеграторов включены , диоды д -разных направлениях. В результате интегрирования входной сигнал сглаживается (фильруется), что сразу предупреждает появление нежелательного. ЯВЛЕНИЯ насыщения эле мента 7с озграничением в отличие от прототипа, где требуется значительное время для формирования компенсирующего формирующего фазового сдвига полезной составляющей управляю- ; щего сигна.ла системы с ограничением.
Далее проинтегрированный сигнал после усиления усилителем 3 посту;пает как на вход порогового элемен-. :та 6,.так и через элемент 7 с ограничением на входобъекта 5 регулирования. Выходной сигнал объекта 5 регулирования через усилитель 4 поступает на входы интеграторов 1 и 2, где осуществляется компенсация входного сигнала. Наличие интеграторЪв 1 и 2 и усилителя 3 в прямой цепи системы способствует появлению перерегулирования. Для исключения этого нежелательного явления с помощью усилителя 4 увеличивается глу бина отрицательной обратной связи системы. Коэффициент передачи уси-. лителя 4 изменяется с цомощью порогового элемента б., который срабатывает и изменяет коэффициент его пердачи при превышении входным сигналом порогового элемента б заданного
.порогового значения. Например, если объект 5 регулирования является, интегрирующим звеном,, то для исключения явления перерегулирования необходимо увеличить коэффициент передачи усилителя 4 в два раза. Уменьшение перерегулирования повышает быстродействие устройства регулирования системы с ограничением и предупреждает явление насыщения элемента 7 с ограничением. Как только выходной сигнал усилителя 3 достигает пределов допустимой ошибки регулирования, то пороговый элемент 6 возвращается в исходное (первоначальное) значение, коэффициент передачи усилителя 4 тоже возвращается в первоначальное значение. Коэффициент передачи усилителя 4 становится равным коэффициенту передачи усилителя 3. Далее в установившемся режиме коэффициент передачи усилителя 4 не изменя, ется и пороговый элемент 6 не срабатывает.
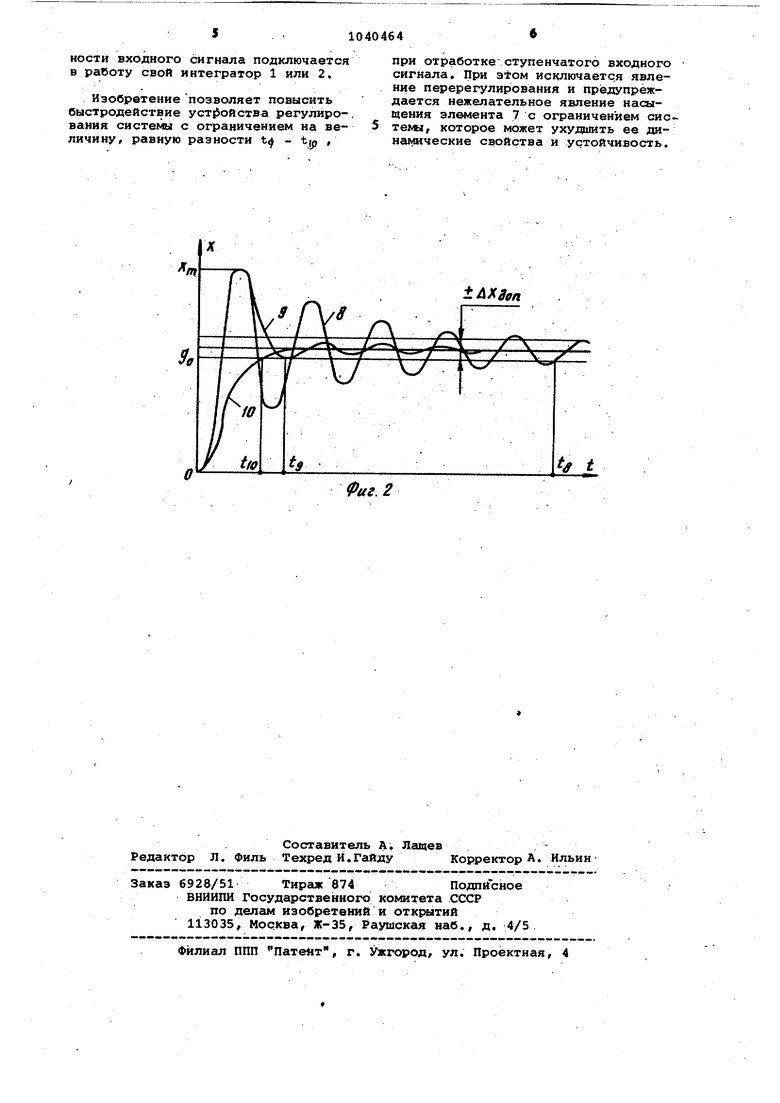
Осциллограмма 8 переходного процесса (фиг. 2), полученная при отработке системой регулирования ступенчатого сигнсша без диодов в цепях обратной связи интеграторов 1 и 2 и без порогового элемента 6, т.е. с постоянным коэффициентом пердачи усилителя 4, имеет колебательн характер. Время регулирования и величина перерегулирования имеют значения Тд и I : Подключение в
цепи обратных связей интеграторов диодов, как это выполнено в прототипе , дает переходили процесс, показанный осциллограммой 9. Колебательность уменьшается. Время регулиЕювания может быть уменьшено до величины путем одновременного увеличения коэффициентов передачи уси- лителей 3 и 4. Однако величина перерегулирования J°
остается достаточно большой, ьо
В предлагаемом устройстве переходный процесс имеет вид осциллограммы 10. Перерегулирования нет. Время регулирования tjQ минимально. Быстродействие увеличивается на величину, .равную; разности t(j - t,o .
При отработке входного сигнала переменной полярности быстродействие предлагаемого устройства тоже повы;шается, так как для каждой поляр-
ности входного сигнала подключается в patSoTy свой интегратор 1 или 2,
Изобретение позволяет повысить быстродействие устройства регулиро-. вания системы с ограничением на величину, равную разности t - iy, ,
при отработке ступенчатого входного сигнала. При з±ом исключаетс.я явление перерегулирования и предупреждается нежелательное явление насыщения злемента 7 с ограничением система, которое может ухудшить ее динамические свойства и устойчивость.
±A}(3ffa
Фиг 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для компенсации влияния ограничения | 1974 |
|
SU469117A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
