(54) НЕПРЕРЫВНЫЙ ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Непрерывный привод | 1989 |
|
SU1734071A2 |
| Непрерывный привод | 1982 |
|
SU1137441A2 |
| Непрерывный привод | 1976 |
|
SU643827A2 |
| Импульсный регулятор | 1978 |
|
SU796790A1 |
| Устройство регулирования системы с ограничением | 1975 |
|
SU1040464A1 |
| Устройство для управления газотурбинной установкой | 1990 |
|
SU1816878A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Следящая система | 1986 |
|
SU1427327A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
. Ч
Изобретение относится к нелинейным системам автоматического управления.
По основному авт, ев, S 487374 известен непрерывный привод, содержащий усилитель, последовательно соединенные силовой механизм с ограничением и блок обратной связи, выход которо/о соединен с первы м входом усилителя, последобательнб соединенные модель усилителя, модель силового механизма без ограничения и модель блока обратной связи, выход которой соединен с первым входом модели усилителя, второй вход которой соединен со вторым входом усилителя, последовательно соединенные фиксатор ограничения и блок временной коммутации, причем вход фиксатора ограничения cot единен с выходом силового механизма с ограничением, первый вход которого через размыкающие контакты блока врем.-нмой коммутации подключен к выходу усилителя, а второй вход через замыкающие контакты блока временной коммутации - к выходу модели усилителя 1 ,
Однако при заданных параметрах
. объекта управления и привода модель привода, состоящая из модели усилителя, модели силового механизма без ограничения и модели блока обратной
JO связи, не оказывает влияние на процесс управления при сигналах возмущения и управления, действующих на объект управления, не вызывающих ограничение выходного сигнала прив.ода,
и и не может улучшить качество регулирования. При больших входных воздействиях, когда выходной сигнал привода начинает ограничиваться, а амплитуда и частота собственных колебаний
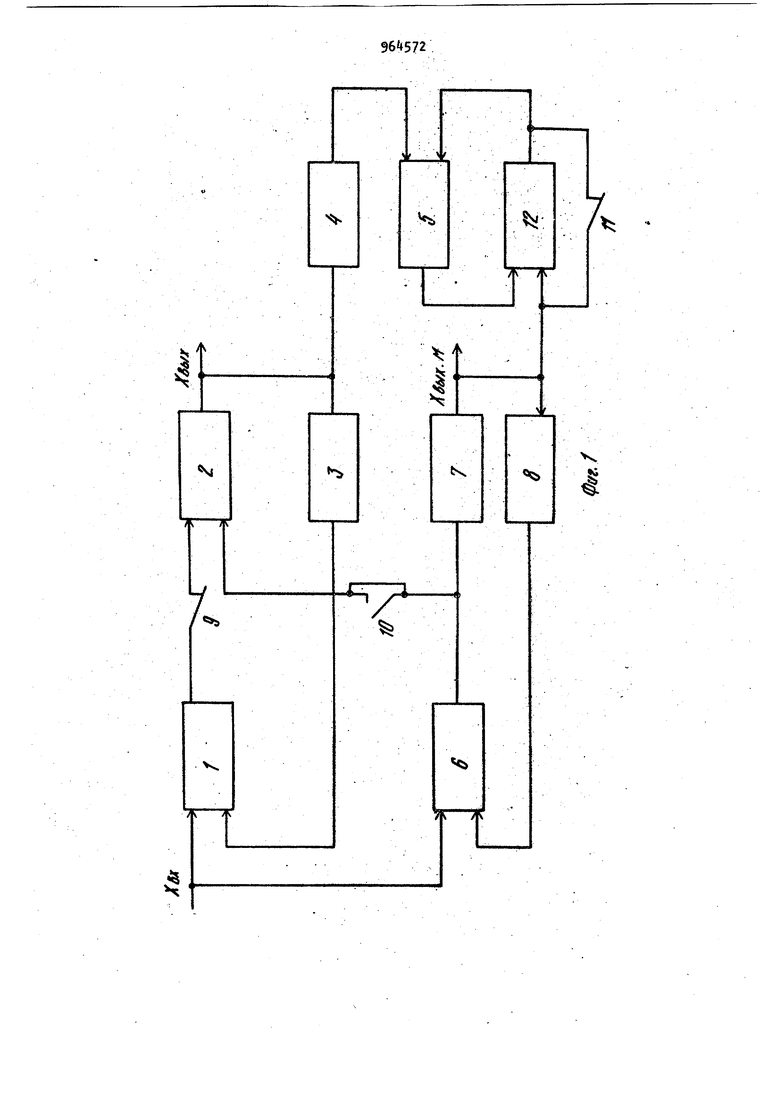
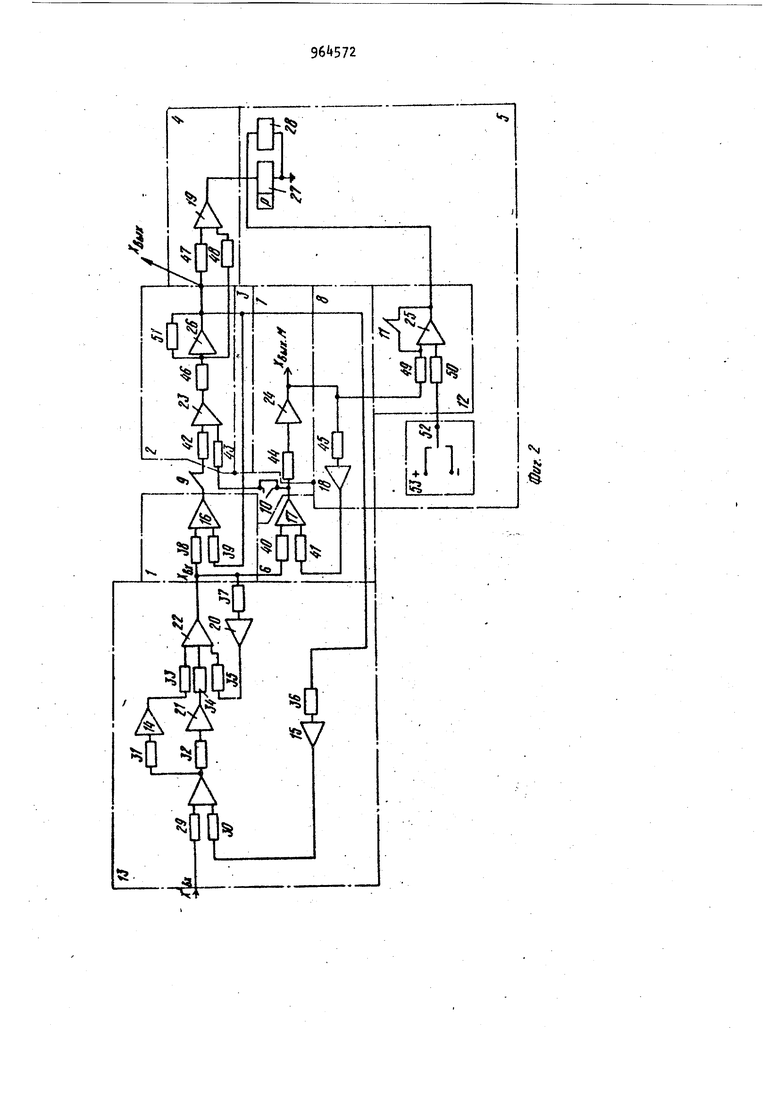
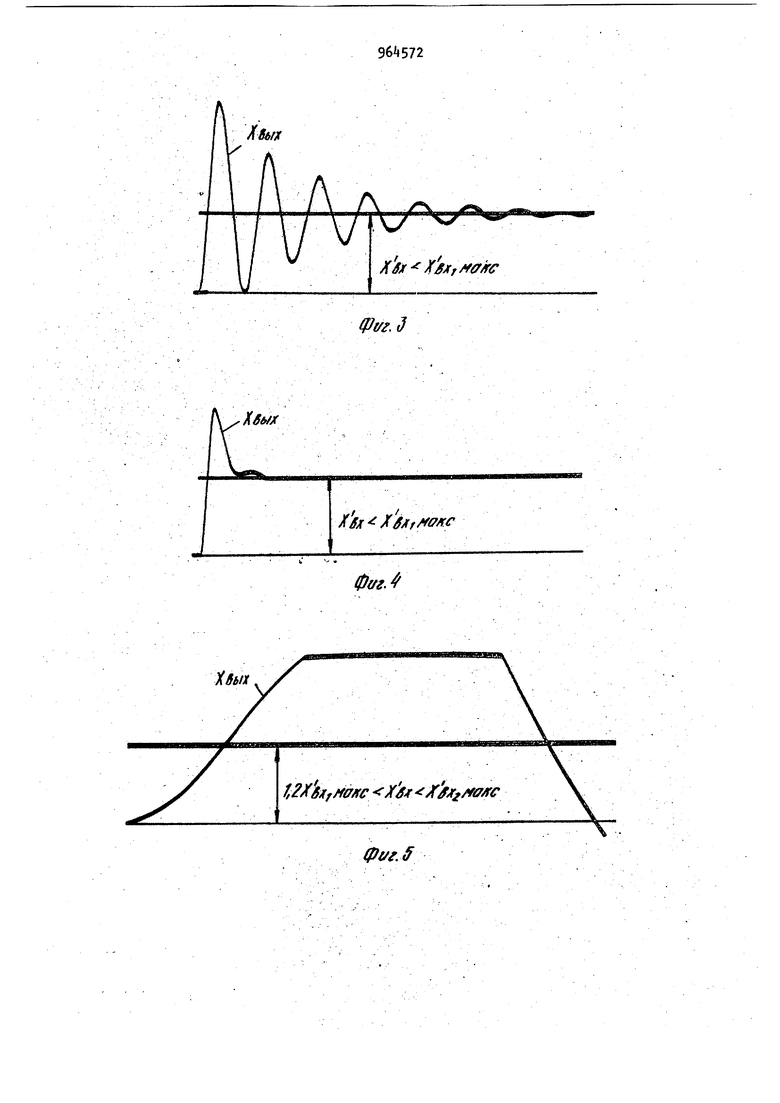
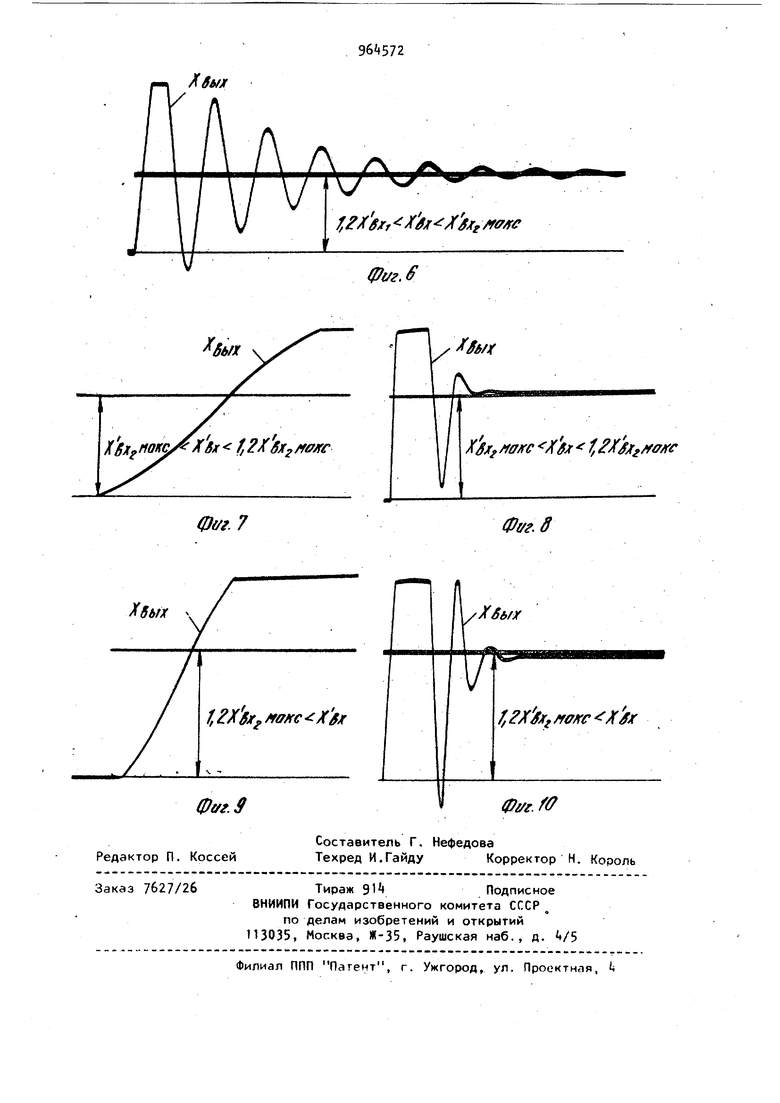
20 объекта управления изменяются, время отпускания блока временной коммутации остается постоянным на протяжении всего времени работы привода. что приводит к ухудшению динамики привода за счет увеличения перерегулирования и уменьшения пределов изменения входных воздействий и может при определенных величинах входных воздействий-вызвать нарушение режима нормального функционирования сис темы автоматического управления. Цель изобретения - уменьшение перерегулирования и времени переходног процесса и расширение пределов изме нения входного воздействия привода. Поставленная цель достигается тем что в приводе дополнительно установлен интегратор, первый вход которого соединен с выходом модели силового механизма без ограничения и через размыкающие контакты блока временной коммутации - с выходом интегратора и вторым входом блока временной коммутации, а второй вход - с выходо блока временной коммутации, замыкающие контакты которого шунтированы. Благодаря постоянному подключению выхода модели усилителя к выход СИЛОВОГО механизма с ограничением эта модель играет роль корректирующего устройства, которое позволяет существенно улучшить качество регули рования привода даже при отсутствии ограничения. 8 режиме ограни 4ения модель привода,в которую входят модель усилителя, модель силового механизма без ограничения и модель блока обратной связи, играет роль ос новного контура привода потому, что выход усилителя отключен от входа силового механизма без ограничения и привод работает под действием выход ного сигнала модели усилителя. Введе ние интегратора в привод позволяет изменять время его работы только под действием сигнала с выхода моде ли усилителя пропорционально измене.нию амплитуды и периода свободных ко лебаний объекта управления, что значительно улучшает динамические харак теристики привода за счет уменьшения перерегулирования и, что особенн важно, при управлении структурно-неу тойчивыми объектами управления. Это время равно интервалу времени t, начало которого определяется моментом срабатывания фиксатора ограничения, а конец - временем окончания ра ряда интегратора при смене знака сигнала У Хр, UQ на противоположный, где Хп. . .-сигнал с выхода 9 . 4 модели силового м еханизма; UQ- значение постоянного напряжения, равное до величине и противоположное по ; знаку величине сигнала, снимаемого с выхода привода в момент ограничения и соответствующего Xgb,x-Xgj,,jj . На фиг. 1 приведена функциональная схема предлагаемого привода; на-фиг. 2 - принципиальная электрическая схема привода; на фиг. 3 - осциллограммы с видами изменения выходных сигналов известного и предлагаемого приводов при различных входных сигналах. Привод содержит усилитель 1, силовой механизм 2 с ограничением, блок 3 обратной связи, фиксатор ограничения, блок 5 временной коммутации, модель усилителя 6, модель силового механизма без ограничения 7 модель блока обратной связи 8, первые размыкающие 9, замыкающие (10 и вторые размыкающие 11 контакты блока 5 временной коммутации. интегратор 12, неустойчивый объект 13 управления, операционные усилители 14-20, интегрирующие операционные усилители 21-25, операционный усилитель 2б, реализующий характеристику Ограничение, первое 27 и второе 28 реле, резисторы 29-50 нелинейное сопротивление 51, переключающие контакты 52 и реле 27, источник 53 постоянного сигнала. входное воздействие привода вых выходной сигнал привода, возмущающее воздействие объекта управления 13, Xgjji -выходной сигнал модели силового механизма без ограничения 7 Предлагаемый привод работает следующим образом. На вторые входы усилителя 1 и модели усилителя 6 подается входное воздействие Xgj(. В усилителе 1 входное воздействие сравнивается с сигналом с выхода датчика 3 обратной связи и сформированный в усилителе 1 сигнал рассогласования через размыкающие контакты S поступает на первый вход силового механизма 2. Выходной сигнал Хр,силового механизма 2 поступает на вход блока 3 обратной связи и фиксатора t ограничения. В модели усилит еля 6 входное воздействие Xgj сравнивается с вцходным сигналом модели датчика 8 обратной связи, и сформированный в модели усилителя 6 сигнал рассогласова ния постоянно поступает на вход модели силового механизма 7 и через за шунтированные замыкающие контакты 10 на второй вход силового механизма 2. Выходной сигнал модели силового меха низма 7 поступает на вход модели 8 обратной связи и первый вход интегра тора 12. Если возмущающее воздействие объекта 13 управления (фиг. Z)Xgj(Xjx,MaK вх мякс входного сигнала привода,соответствующая выходному сигналу привода при котором приво входит в ограничение), то силовой ме ханизм 2 не входит в состояние ограничения и фиксатор ограничения находится в исходном состоянии. В это случае сигнал с выхода фиксатора k ограничения не поступает на первый вход- блока временной коммутации, который остается в исходном состоянии. Контакты 9 при этом замкнуты и сигнал с выхода усилителя 1 беспрепятст венно проходит на первый вход силоао го механизма 2. Контакты 11 шунтируют интегратор 12, и выходной сигнал модели силового механизма 7 беспрепятственно проходит на второй вход блока 5 временнрй коммутации, выход ной сигнал которого на второй вход, интегратора 12 не поступает. Из осциллограммы (фиг. 3 и ) видно, что перерегулирование в предлагавмом приводе при указанных условиях гораздо меньше, чем в известном при одном и том же уровне ограничения. Осциллограммы на фиг. 5 и 6 иллюстрируют работу соответственно известного и предлагаемого приводов пр условии, что ., Т.е. в случае неустойчивого процесса .4 - - ч/- регулирования, где-Лд., | цд -воЗмущающе воздействие объекта управления, соответствующее выходному сигналу привЬда, при котором срабатывает фиксатор . При достижении возмущающим воздей ствием объекта управления величины ) вход привода посту .ет такой сигнал Xg, что силовой механизм 2 входит в ограничение. При этом срабатывает фиксатор ограничения и подает сигнал на первый сход блока 5 временной коммутации. Блок 5 размыкает контакты 9 и отключает первый вход силового механизма 2 от выхода усилителя 1, размыкает контакты 1 О , отключает выход модели силового механизма 7.от первого входа блока 5 временной коммутации и подключает к первому входу интегратора 12 (т.е. расшунтирует интегратор 11), подает на второй вход интегратора постоянное напряжение UQ. Интегратор 12 начинает интегрировать величину сигнала Начиная с этого момента времени выходной сигнал силового механизма 2 с ограничением изменяется под действием сигнала с модели усилителя, что улучшает дина4ику системы управления и обеспечивеет устоичиБЫи процесс управления. Осциллограммы на фиг. 7 и 8 иллюст.рируют работу соответственно известного и предлагаемого приводов при V /х . тх Вх - бхт. условии , что i. отрезок времени t начало которого определяется моментом срабатывания фиксатора 4 ограничения, а конец - временем разряда интегратора сигналом У при смене его знака . на противоположный, блок 5 временной коммутации по сигналу с выхода интегратора 12, поступающему на его второй вход, возвращается в исходное состояние. Контакты 9 замыкаются и подключают выход усилителя 1 ко входу силового механизма 2. Контакты 12 замыкаются и отключают выход модели силового механизма 8 от первого входа интегратора и подключает его ко второму входу блока 5 временной коммутации, который прекращает подачу сигнала на второй вход интегратора 12. Интервал времени tn будет изменяться в зависимости от изменения амплитуды и частоты сигнала входе привода, которые определяются действующими на объект управления 13 внешними и параметрическими возмущениями, т.е. и конечном счете t определяется временем заряда и разряда интегратора 12,что позволяет улучшить динамику системы управление при наличии возмущения. Таким образом, в предлагаемом приводе реализуется самонастройка по отношению к величине t,, в то время как в известном приводе t выбирается из условия , где Т - период свободных колебаний системы управления, причем изменение периода Т собственных колебаний и амплитуды входного сигнала привода может.привести к неустойчивому процессу управления. Осциллограмма на фиг. 9 демонстрирует неустойчивый процесс управления в из вестном приводе, когда и фикси ровано. Осциллограмма на фиг. 10 демоястрирует устойчивый процесс управ ления в предлагаемом приводе, когда t изменяется в зависимости ot ампли туды и периода Xg т.е. при наличии интегратора .12. Известный и пред лагаемый приводы работают в одних и Vex же условиях при ,2 Хзхгмдкй Указанные отличительные особенности позволяют примерно в три раза уменьшить величину перерегулирования и время переходного процесса и за счет этого улучшить качество регулирования при заданной структуре объ- ; екта управленйя-и непрерывного привода; примерно на 20 увеличить пределы изменения входных воздействий и за счет этого использовать привод в условиях действия больших возмущений при заданных входных воздействиях, структурах объекта управления и предлагаемого привода, на 30% уменьшить величину ограничения и за счет этого уменьшить величину выходного сигнала Хвь|хПривода, обеспечить устойчивый процесс управления, что приводит в CBOto очередь, к экономии энергии для управления примерно на к облегчению конструкции системы управления примерно на kQ%. Приведенные вь1воды и данные подтверждаются проведенными исследованиями на АВМ Электрон по схеме приведенной на фиг. 2. Формула изобретения Непрерывный привод по авт. св. If 48737, отличающийся тем, что, с целью уменьшения величины перерегулирования и времени переходного процесса и расширения пределов изменения входных воздействий привода, в нем дополнительно установлен интегратор, первый вход которого соединен с выходом модели силового механизма без ограничения и через размыкающие контакты блока временной коммутации - с выходом интегратора и вторым входом блока временной коммутации, а второй вход - с выходом блока временной коммутации, замыкающие контакты которого шунтированы. . Источники информации, принятые во внимание, при экспертизе 1. Авторское свидетельство СССР If а737, кл. G 05 В 5/01, 1973 (протбтип).
N
Кеш
/// J(
t XSXfffffKC
№.J
0fff.
(pt/f.S
