Предметом изобретения является электромеханическое устройство для решения трансцендентных уравнений с комплексными корнями вида:
-0,
D (z) - М (z) 1
где-: т -время запаздывания; M(z), D(z) - полиномы комплексной переменной z -p-l
Решение уравнения основано на применении метода принудительного обследования комплексной плоскости z путем непрерывного изменения модуля р и аргумента ®. Величине z придается большое число значений, равномерпо распределенных внутри некоторой области па комплексной плоскости Z.
Аналогичные устройства известны. Отличительной особенностью предлагаемого устройства является то, что в нем применяются электромеханические модели полиномов и следящие системы, отрабатывающие логарифмы модулей и аргументы полиномов.
Полиномы D(z) и M(z) могут быть выражены в показательной форме:
D(z) q.
i M(z) m Г
Используя значения
полиномов, уравнение () может быть представлено в виде
1- 0. (II) Для решения этого уравнения на решающем устройстве логарифмируются обе части уравнения (И) и уравнение принимает вид
In q-l-ja Inm + jp-Tz. (Ill)
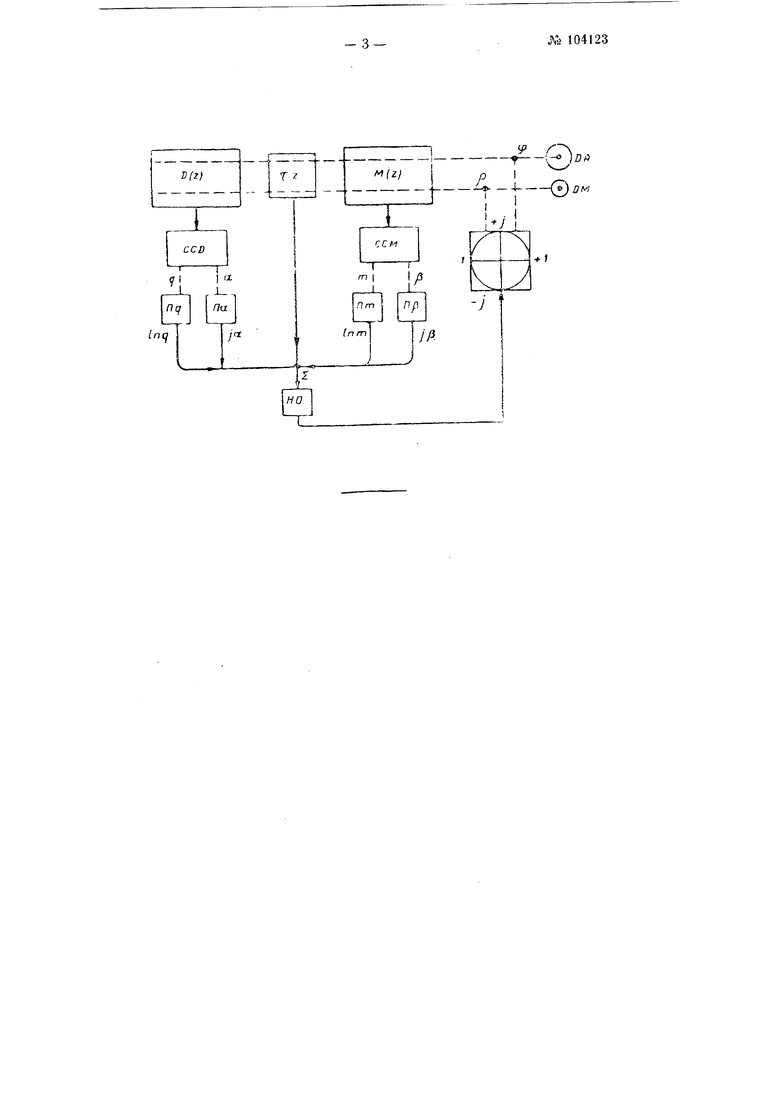
Схема решающего устройства, изображенная на чертеже, содержит модели полиномов М (z), D(z) и величины т. Z, две следящие системы CCD и ССМ, потенциометры nq. Па, Пт, Пз и ноль-Орган.
Модели M(z}, D(z) и т z собраны по схеме, состоящей из ряда фазовых модуляторов и профилированных потенциометров. В эти модели вводится независимая переменная посредством осей 9 и р, приводимых в движение двигателями DA и DM.
На выходе моделей D(z) и M(z) получаются электрические напряжения с амплитудами q и ш и фазами а и р. Следящие системы CCD и ССЛ отрабатывают эти величины в виде механических перемещений, соответственно пропорциональных модулям полиномов ш и q и нх аргументам а и р. Оси q и m управляют потенциометрами riq и Пт, дающими на выходе переменные напряжения, пропорциональные Inq и Inra. Оси а и |3 управляют потенциометрами Па и Пэ, дающими на выходе переменные напряжения, пропорциональные ja и jp (напряжения, сдвинутые на 90° по отношению к In q и In m).
Выходные напряжения потенциометров nq. Па, Пш, Пз и модели T:Z с соответствующими знаками суммируются между собой и подаются на ноль-орган НО.
Решение уравнения основано на применении метода принудительного обследования комплексной плоскости Z путем непрерывного изменения модуля р и аргумента оВеличине z придается большое число значений, равномерно распределенных внутри некоторой области на плоскости z.
При обследовании комплексной плоскости следящие системы непрерывно отрабатывают In q, In ш, Р- и Jp.
В момент, когда суммарное выходное напряжение становится равным нулю, срабатывает нольорган НО и значение корня фиксируется на плоскости комплексного переменного с помощью механического устройства или электронно-лучевой трубки при обзоре этой плоскости по спирали.
Предмет изобретения
Устройство для решения характеристических уравнений линейных систем автоматического регулирования с запаздыванием, вида D(z) - M(z) 0, где D(z) и M(z) полиномы от Z, 1: - время запаздывания, отличающееся применением фазовых модуляторов и профилированных потенциометров для : z и полиномов D(z) и M(z), следящих систем для отработки амплитуды и фазы напряжений, моделирующих указанные полиномы, схем для логарифмирования этих напряжений, ноль-органа и индикатора, управляемого нольорганом и фиксирующего значение корня на плоскости комплексного переменного при обзоре этой плоскости по спирали.
Ч
-О
-I(®) дм