«
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов, и может быть использовано в качестве загрузочно-разгру- зочного устройства с широким диапазоном действия для станков-автоматов и автоматических линий, а также в качестве устройства, обеспечивающего перемещение различного рода инструмента (сверло, зенкер, отвертка, мерительные калибры и т.д.) как на обрабатывающих, так и на сборочных операциях„
Цель изобретения - распшрение технологических возможностей за счет повышения точности позиционирования и жесткости конструкции.
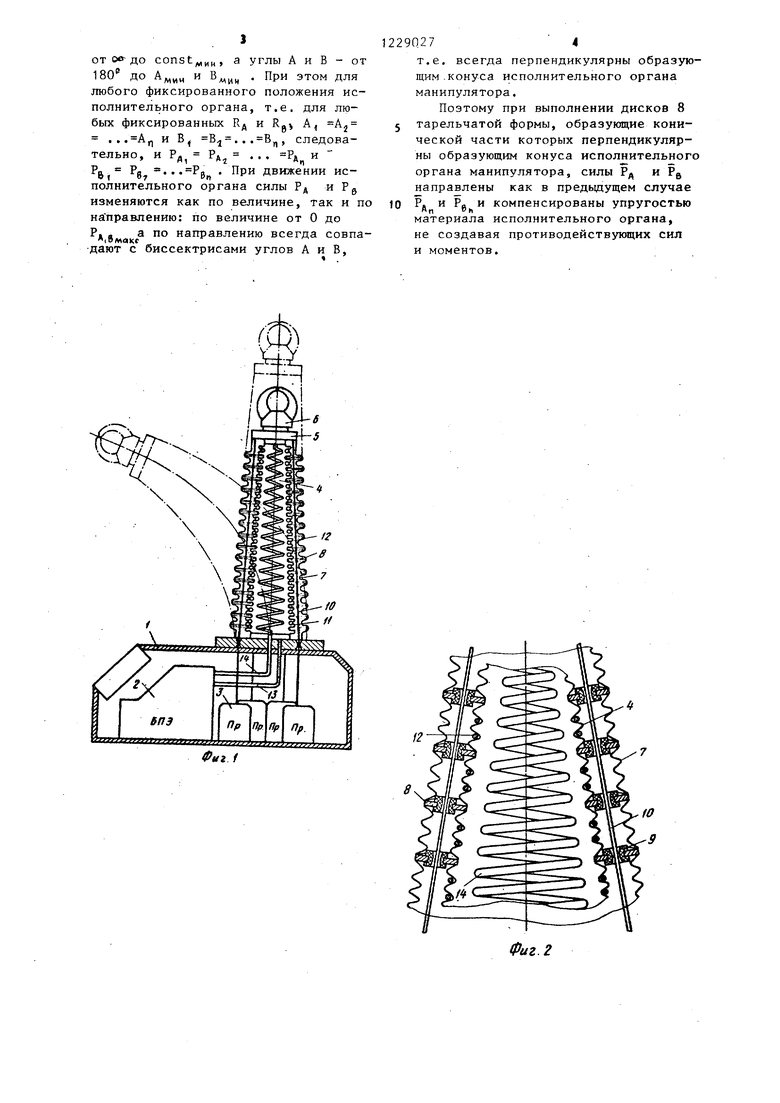
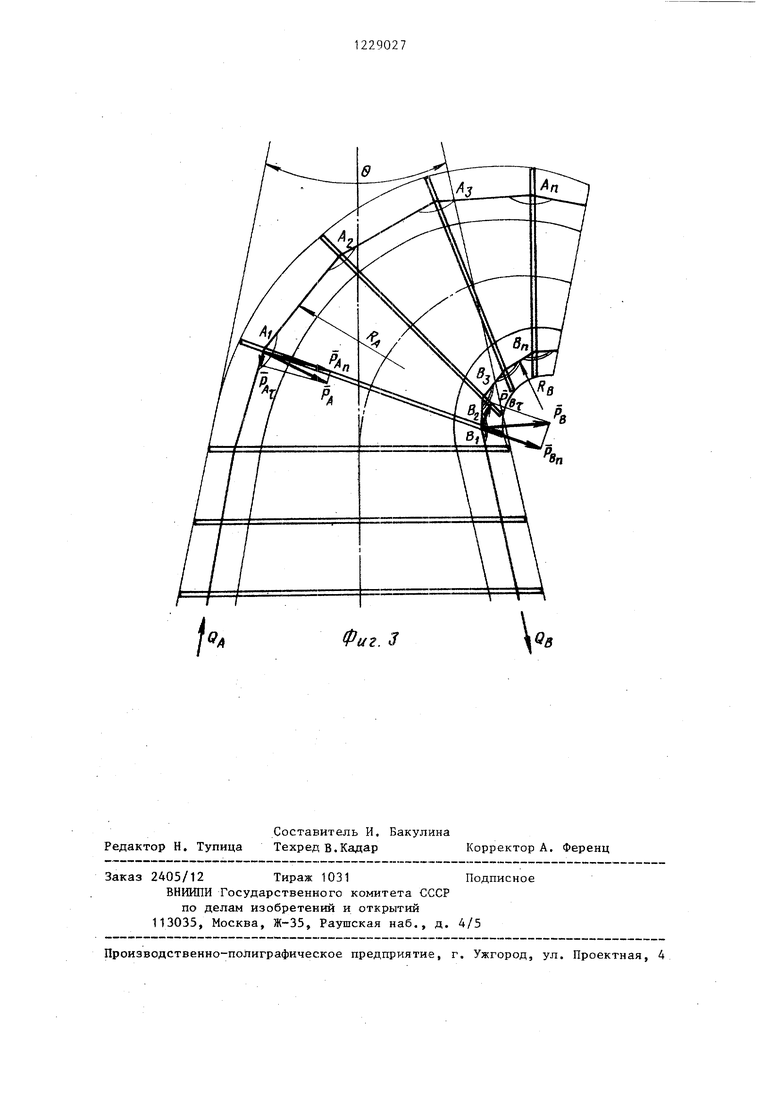
На фиг, 1 представлен манипулятор, общий ВИД; на фиг. 2 - .часть исполнительного органа манипулятора; на фиг. 3. - схема распределения сил в местах контакта подшипников скольжения диафрагм жесткости с гибкими элементами.
Манипулятор состоит из основания 1, установленн{ 1х на нем источника 2 рабочей среды,привода 3 управления, выполненного в виде системы приводов, и исполнительного органа 4« Испол- нительньш орган 4 герметично закреплен на основании 1, а на свободном конце исполнительного органа 4 установлена кисть 5 со сменным схва- том 6,
Исполнительный орган Л выполнен в виде герметично закрепленной на основании упругой защитной оболочки 7, охватывающей жесткие элементы, например диски 8 тарельчатой формы, имеющие отверстия, вьтолненные в центральной части и по периферии, в последних установлены подшипники 9 скольжения, в которых размещены управляющие гибкие элементы 10, Последние соединены с одной стороны с кистью, а с другой - с приводом управления. Дополнительная упругая оболочка 11 армирована кольцами 12. Упругая защитная оболочка 7 и дополнительная упругая оболочка 11 выполнены в виде гофрированных конических камер, а диски 8 тарельчатой формы установлены последовательно между этими коническими камерами„
;;
iO
i;s
2 рабочей среды соединен со схватом 6, при этом канал выполнен в виде спиральной трубки, располйженной в - центральной части исполнительного органа.
Манипулятор работает следующим образом.
При подаче в исполнительный орга 4 рабочего давления и при отсутстви сигнала в системе приводов привода управления конец манипулятора осу- ществляет прямолинейное поступатель вое движения за счет удлинения гоф- рированных конических камер. При этом гибкие элементы 10 свободно пе ремещаются в дисках 8 тарельчатой формы до величины, ограниченной их длиной и конструкцией исполнительного органа 4,
При подаче управляющего сигнала сразу во все приводы 3 управления и отсутствии давления в исполнительно органе 4 происходит обратное переме щение за счет сжатия гофрированных к мер исполнительного органа.
При одновременной подаче давлени в исполнительный орган 4 и один из приводов 3 управления происходит из гиб исполнительного органа 4 в сторону работающего привода, причем дл на манипулятора и кривизна дуги зависят ог величины давления, подавае мого в исполнительньш орган, и вели чины сигнала, подаваемого на работ ющий привод. Комбинируя величины давления в исполнительном органе 4 и сиг налов в приводах 3 управления, можно перемещать кисть 5 манипулятора по любым траекториям в предела рабочей зоны..
2
2fi
30
35
40
45
50
.Кроме того, при изгибе исполнительного органа изменяется его пространственное положение и перераспределяются сипы, действующие в отдельных узлах его конструкции, а i-iMeHHo, гибкие элементы в местах ка сания с подшипниками 9 скольжения дисков 8 тарельчатой формы начнут изламываться, образуя углы А,...,
А. и В
1
В„
при
этом возникают гибких тяг на диски тарельчатой формы. Эти силы направлены по биссектрисам соответсилы .давления Р и Р
ствующих углов. При отклонении ис- Полость, образованная дополнитель- 55 полнительного органа 4 манипулятора ной упругой оболочкой 11, соединена посредством канала 13 с-источником 2 рабочей среды. Каналом 14 источник
от номинального положения до положения максимального изгиба, радиусы образующих R и Rg будут изменятьс
,
;;
iO
i;s
2290272
2 рабочей среды соединен со схватом 6, при этом канал выполнен в виде спиральной трубки, располйженной в центральной части исполнительного органа.
Манипулятор работает следующим образом.
При подаче в исполнительный орган 4 рабочего давления и при отсутствии сигнала в системе приводов привода 3 управления конец манипулятора осу- . , ществляет прямолинейное поступатель- . вое движения за счет удлинения гоф- рированных конических камер. При этом гибкие элементы 10 свободно перемещаются в дисках 8 тарельчатой формы до величины, ограниченной их длиной и конструкцией исполнительного органа 4,
При подаче управляющего сигнала сразу во все приводы 3 управления и отсутствии давления в исполнительном органе 4 происходит обратное перемещение за счет сжатия гофрированных ка- мер исполнительного органа.
При одновременной подаче давления в исполнительный орган 4 и один из приводов 3 управления происходит изгиб исполнительного органа 4 в сторону работающего привода, причем длина манипулятора и кривизна дуги зависят ог величины давления, подаваемого в исполнительньш орган, и величины сигнала, подаваемого на работающий привод. Комбинируя величины давления в исполнительном органе 4 и сиг налов в приводах 3 управления, можно перемещать кисть 5 манипулятора по любым траекториям в пределах рабочей зоны.. .
2
2fi
30
35
40
.Кроме того, при изгибе исполнительного органа изменяется его пространственное положение и перераспределяются сипы, действующие в отдельных узлах его конструкции, а i-iMeHHo, гибкие элементы в местах касания с подшипниками 9 скольжения дисков 8 тарельчатой формы начнут изламываться, образуя углы А,...,
А. и В
1
В„
при
этом возникают гибких тяг на диски тарельчатой формы. Эти силы направлены по биссектрисам соответсилы .давления Р и Р
ствующих углов. При отклонении ис- полнительного органа 4 манипулятора
от номинального положения до положения максимального изгиба, радиусы образующих R и Rg будут изменяться
const H, а углы А и В - от 180 до и В,„ . При этом для любого фиксированного положения исполнительного органа, т.е. для любых фиксированных Кд и Rg А А,2 ...АП и В В,1 ...В„, следовательно, и Рд - РА
Р.. и
р Pg ...Pg . При движении исполнительного органа силы Рд и Рд изменяются как по величине, так и по на правлению: по величине от О до р а по направлению всегда совпа- дают с биссектрисами углов А и В,
229Q27
т.е. всегда перпендикулярны образующим.конуса исполнительного органа манипулятора.
Поэтому при выполнении дисков 8 5 тарельчатой формы, образующие конической части которых перпендикулярны образующим конуса исполнительного органа манипулятора, силы Рд и РВ направлены как в предыдущем случае 10 Р и Pg и компенсированы упругостью материала исполнительного органа, не создавая противодействующих сил и моментов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU501864A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1511121A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1123227A1 |
| Манипулятор портального типа | 1987 |
|
SU1521578A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1283100A1 |
Фиг 1
12
Фиг. 2
Редактор Н. Тупица
Составитель И. Бакулина
Техред В.КадарКорректор А. Ференц
Заказ 2405/12 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Исполнительный орган манипулятора | 1983 |
|
SU1139621A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
