Изобретение относится к электро.технике и может быть использовано в электроприводах крановых механизмов
Известен двухскоростной электропривод, содержащий асинхронный злект родвигатель с двумя .обмотками статора на различное число полюсов, две одноименные фазы которых через коммутационные элементы соединены с источниками питания, а третья фаза обмотки статора с большим числом полюсов соединена с одной из фаз обмотки статора с меньшим числом полюсов, блок управления, выходы которого соединены с управляющими входами коммутационных элементов. Это устройство обеспечивает ограничение динамических, нагрузок в элементах механизма при переключении числа полюсов обмотки статора и переходе на пониженную скорость вращения l .
Недостатком этого устройства является то, что существенное ограничрние момента генераторного торможения осуществляется на высоких скоростях при отсутствии генераторного момента, создаваемого обмоткой с меньшим числом полюсов, так как магнитное поле этой обмотки является пульсирующим (однофазное включение обмотки статора) и используется в качестве токоограничивающего элемента. Поэтому устройство не обеспечивает достаточную надежность работы электропривода во всем диапазоне изменения скорости вращения электродвигателя.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является двухскоростной электропривод, содержащий асинхронный электродвигатель с двумя обмотками статора на различное число полюсов, соединенными по схеме звезда, у которого первая и вторая фазы статорной обмотки с меньшим числом полюсов соединены с фазными выводами источника питания через коммутационные элементы первого коммутационного аппарата, первая и третья фазы статорной обмотки с большим числом полюсов соединены с фазными вьаводами источника питания через коммутационные элементы второго коммутационного аппарата, третий коммутационный аппарат. В этом устройстве в момент перехода на пониженную скорость одновременно с подключением обмотки статора с большим числом полюсов к источнику питания подключаются две фазы обмотки статора с меньшим числом полюсов. Такое подключение обмоток создает эллиптическое мапнитное поле, в результате чего механическая характеристика становится- более мягкой при ограниченном моменте генераторного торможения 2 .
Недостатком известного устройства является то, что максимальное значение момента генераторного торможе ния имеет значительную величину (80% от максимального момента генёратор ного торможени-я в естественной схеме включения) , поэтому в связи с резким перепадом момента генераторного торможения при снижении скорости вращения возникает избыточный динамический момент, что приводит к значительным ударам и перегрузкам в кинематической цепи механизма, к повышенному износу элементов механизма. Все это в значительной степени снижает надежность электропривода. В электроприводе крановых механизмов избыточный динамический момент, приводит к раскачке груза, вследствие чего уменьшается производительность крана.
Целью изобретения является повышение надежности работы электропривода за счет ограничения динамич.еского момента и повьлиение производительности работы механизма.
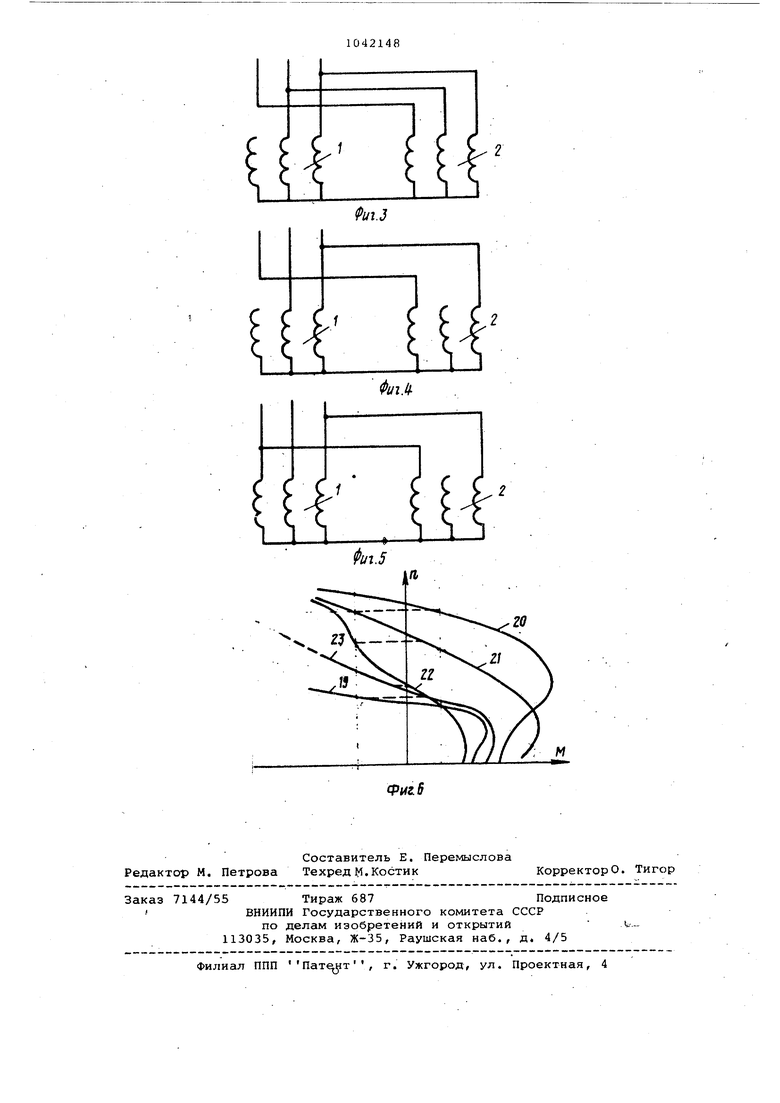
Поставленная цель достигается тем, что в двухскоростной электропривод, содержащий асинхронный электродвигатель с двумя статорными обмотками на различное число полюсов, соединенными по схеме з.везда, у которого первая и вторая фазы статорной обмотки с меньшим числом полюсов соединены с фазными выводами источника питания через коммутационные элементы первого коммутационного аппарата, первая и третья фазы статорной обмотки с большим числом полюсов .соединены с фазными выводами источника питания через коммутационные элементы второго кс мут ационного аппарата,третий коммутационный аппарат, введены четвертый и пятый коммутационные аппараты, командоаппарат, два реле врземени; элемент И и элемент ИЛИ,.третий коммутационный аппарат подключен параллельно коммутационному элементу первого коммутационного аппарата в первой фазе статорной обмотки с меньшим числом полюсов, четвертый коммутационный аппарат подключен параллельно коммутационному элементу второго коммутационного аппарата в третьей фазе статорной обмотки с большим числом полюсов, пятый коммутационный аппарат включен между нулевыми выводами звезды каждой из статорных обмоток, выход элемента ИЛИ соединен с управляющим входом первого коммутационного аппарата, один вход элемента ИЛИ соединен с одним выходом первого реле «ремени, а его другой вход соединен с выходом командоаппарата, другой выход которого соединен с входами двух реле времени и с управляющим входом четвертого коммутационного аппарата один выход второго реле временен соединен с управляющим входом второго коммутационного аппарата, другой : . его выход соединен с управляющим входом пятого коммутационного аппарата и с одним входом элемента И, другой вход которого соединен с дру гим выходом первого реле времени, а выход элемента И соединен с управляющим входом третьего коммутационного аппарата. Коммутационные элементы и блок управления выполнены в виде кулачкового контроллера на три фиксированных положения и два промежуточных нефиксированных положения, четыре контакта которых подключены к соответствующим фазам обмоток статоров электродвигателя, а выводы пятого контакта соединены с нулевыми точками звезды двух обмоток статоров электродвигателя, На фиг.1 показана блок-схема устройства; на фиг.2 - схема кулачк.ового контроллера; на фиг.З, 4 и 5 схемы подключения обмоток статоров электродвигателя; на фиг.6 - механические характеристики электродвигателя . . Двухскоростной электропривод содержит асинхронный электродвигатель со статорной обмоткой 1 с большим числом полюсов и статорной обмоткой 2 с меньшим числом полюсов, соединенными по схеме звезда, у кото рого первая и вторая фаза статорной обмотки с меньшим числом полюсов соединены с фазными выводами источника питания через коммутационные элементы первого коммутационного ап парата 3, первая и третья фа.зы ста торной обмотки с большим числом полюсов соединены с фазными выводами источника питания через коммутацион ные элементы второго коммутационног аппарата 4, третий коммутационный аппарат 5, четвертый 6 и пятый 7 коммутационные аппараты, командоаппарат 8, два реле 9 и 10 времени, элемент И 11 и элемент ИЛИ 12, третий коммутационный аппарат 5 подклю чен параллельно коммутационному эле менту первого коммутационного аппарата 3 в первой фазе статорной обмо ки 2 с меньшим числом полюсов, четвертый коммутационный аппарат 6 под ключен параллельно коммутационному элементу второго коммутационного ап парата 4 в третьей фазе статорной обмотки 1 с большим числом полюсов, пятый коммутационный аппарат 7 вклю чен между нулевыми выводами звезды каждой из статорных обмоток 1 и 2, выход элемента ИЛИ 12 соединен с управляющим входом первого коммутационного аппарата 3, один вход элемента ИЛИ 12 соединен с одним вы ходом первого реле 9 времени, а его другой вход соединен с выходом командоаппарата 8, другой выход которого соединен с входами двух реле 9 и 10 времени и с управляющим входом четвертого коммутационного аппарата 6, один выход второго реле 10 времени соединен .с управляющим входом второго коммутационного аппарата 4, другой его выход соединен с управляющим входом пятого коммутационного аппарата 7 и с одним входом, элемента И 11, другой вход которого соединен с другим выходом первого реле 9 времени, а выход элемента И 11 соединен с управляющим входом третьего коммутационного аппарата 5 . Коммутационный элемент и блок управления могут быть выполнены в виде кулачкового контроллера 13 на три фиксированных положения и два нефиксированных промежуточных положения, первые два контакта 14 и 15 соединены с двумя фазами статорной обмотки 1, два контакта 16 и 17 - с двумя фазами статорной обмотки 2 электродвигателя, контакт 18 - с нулевыми точками звезды двух статорных обмоток 1 и 2 электродвигателя. Электродвигатель имеет две естественные механические характеристики 19 и 20 и три искусственные механические характеристики 21, 22 и 23. Устройство работает следующим образом. При поступлении сигнала от командоаппарата 8 на включение высокойскорости сигнал через элемент ИЛИ 12 поступает на управляющий вход коммутационного аппарата 3, который включается и подключает статорную обмотку 2 с меньшим числом полюсов к источнику питания. Электродвигатель разтоняется и работает на механической характеристике 20. При переходе на пониженную скорость вращения сигнал от командоаппарата 8 поступает на вход реле 10 времени и реле 9 времени, с выхода которого через элемент ИЛИ 12 поступает сигнал на управляющий вход коммутационного аппарата 3, удерживая его во включенном положении, ВТО же время с выхо-, да реле 10 времени сигнал поступает на управляющий вход коммутационного аппарата 7, который включается и соединяет между собойнулевые точки звезды двух статорных обмоток 1 и 2, включается коммутационный аппарат б. Собирается схема включения обмоток статоров электродвигателя, изображенная на фиг.З-, в которой обмотка статора с меньшим числом полюсов создает круговое магнитное поле, а обмотка с большим числом полюсов - эллиптическое магнитное поле (неполнофазный режим работы), в результате чего электродвигатель переходит на механическую характеристику 21 с ограниченным значением момента генераторного торможения. Реле 9 времени с выдержкой времени отключает коммутационный аппарат 3 и через элемент И 11 включает комму тационный аппарат 5, в результате чего создается неполнофазный режим работы обмотки с меньшим числом полюсов при работе электродвигателя по схеме, изображенной на фиг.4. Электродвигатель переходит на механ ческую характеристику 22, на которо момент генераторного торможения так же ограничен. Затем срабатывает рел 10 времени и включается коммутацион ный аппарат 4, в связи с чем все , три фазы статорной обмотки 1 с боль шим числом полк1Сов подключаются к источнику питания (фиг.5) и электро двигатель переходит на механическую характеристику 23. Снимается управляющий сигнал с выхода реле 10 .времени, отключаются коммутационные аппараты 5 и 7 и электродвигатель переходит на естественную механичес кую характеристику 19. Включение электродвигателя и его переход на пониженную скорость возможен с помощью кулачкового контроллера 14. Во втором фиксированном .положении контроллера 13 замкнуты контакты 16 и 17 и к источнику пита ния подключена статорная обмотка 2, во втором промежуточном положении включены контакты 15, 16, 17 и 18 собирается схема (фиг.З) и электродвигатель переходит на механическую характеристику 21. При переключении в первое промежуточное положение, замкнуты контакты 15, 16 и18, собирается схема (фиг.4) и электродвигатель переходит на механическую характеристику 22. В первом промежуточном положении кулачкового контроллера включаются контакты 14, 15, 16 и 18,собирается схема (фиг.5), электродвигатель переходит .на механическую характеристику 23. И,, наконец, в первом фиксированном положении остаются замкнутыми контакты 15 и 16, а электродвигатель переходит на естественную механическую характеристику 19. Таким образом,, в соответствии с ; механическими характеристиками, получаемыми при переключении обмоток статоров, максимальный момент генераторного торможения имеет ограниченную величину и не превышает максимального момента в двигательном режиме работы во в.сем диапазоне изменения скорости вращения. Тем самым достигается плавность генераторного торможения электродвигателя с ограниченным значением динамического момента, что повышает надежность работы механизма. При этом благодаря плавности торможения груз на крановых механизмах не раскачивается, чем достигается повышение прризводительности этих механизмов.
., ..
/
6 5.
|
1
/
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Электропривод | 1980 |
|
SU930556A2 |
| Электропривод переменного тока | 1990 |
|
SU1735992A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| Асинхронный электропривод | 2017 |
|
RU2657010C1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Устройство для торможения многодвигательного электропривода переменного тока | 1982 |
|
SU1066011A1 |
| Многодвигательный электропривод | 1986 |
|
SU1381681A1 |
| Многодвигательный электропривод переменного тока | 1984 |
|
SU1192088A1 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2009 |
|
RU2401503C1 |
ДВУХСКОРОСТНОЙ ЭЛЕКТРОПРИВОД, содержащий асинхронный электродвигатель с двумя статорными обмотка ми на различное число полюсов, соединеннымй по схеме звезда, у которого первая и вторая фазы статорной обмотки с меньшим числом полюсов. соединены с фазными выводами источника питания через коммутационные элементы первого коммутационного аппа- рата, первая и третья фазы статорной обмотки с большим числом полюсов соединены с фазными выводами источника питания через коммутационные элемейты второго коммутационного аппарата третий коммутационный аппарат, о т- ;, личающийся тем, что, сцелью повышения надежности, в него введены четвертый и пятый коммутационные аппараты, командоаппарат, два реле времени, элемент И и элемент ИЛИ, т)етий коммутационный аппа)ат подключен параллельно коммутационному элементу первого коммутационного аппарата в первой фазе статорной обмотки с меньшим числом полюсов Четвертый коммутационный аппарат подключен параллельно коммутационному элементу второго коммутационного аппарата в третьей фазе статорной обмотки с большим числом полюсов, пятый коммутационный аппарат включен между нулевыми выводами звезды каждой из статорных обмоток, выход элемента ИЛИ соединен с управляющим входом первого коммутаi ционного аппарата, один вход элемента ИЛИ соединен с одним выходом вого реле времени, а его другой вход соединен с выходом командоаппарата, .другой выход которого соединен с входами двух реле времени и с управляющим входом четвертого коммутационного аппарата, один выход второго реле времени соединен с управляюЭ щим входом второго коммутационного аппаратаг другой его выход соединен 1; с управляющим входом пятого коммутаND ционного аппарата и с. одним входом элемента И, другой вход которого соединен с другим выходом первого X реле времени, а выход элемента И сое динен с управляющим входом третьего коммутационного аппарата.
I I I
Т iniL
I ff.
ft 1/7 If t
TfTl jntif ТТЛ I til
I П
14
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР | |||
| Электропривод | 1979 |
|
SU801214A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
