Изобретение относится к автоматическому управ лению и регулированию. и может быть использовано для управления общетехническими объектами, содержащими значительные запаздывания и подверженными j влиянию неконт ролируемйх возмущений с существенно нестационарными статистическими свой ствами. Диндмика объекта по каналам регулирования описывается передаточной функцией k -pt k - коэффициент передачи; Т - постоянная времени инерции; . t - время истого запаздывания. Исполнительный блок содержит два исполнительных органа, один из которых является более быстродействующим, но с Меньшим диапазоном действия, чем у медленнодействующего исполнительного органа. Время запаздывания и коэф фициенты передачи исполнительных органов одинаковые. -Примером такого рода объектов могут служить некоторые агрегаты прокатного произйодства. Для обеспечения инвариантности регулируемой координаты от внешних сил известен регулятор, содержащий последовательно включенные первый блок сравнения, обратнуй модель объекта без учета запаздывания, второй блок сравнения и блок задержки, .выход которого соединен с вторым входом второго блока задержки ClJ. Однако.зтот регулятор не обеспечивает высокой точности регулирования при действии высокочастотных возмущений. Наиболее близкимк изобретению по технической сущности является адаптивное устройство, содержащее, первый экстраполятор и последовательно соединенные первый блок сравнения, первый фильтр низкой частоты обратную модель объекта и второй блок сравнения, второй вход которого соединен с выходом блока задержки, выход первого зкстраполятора подключен к входу первого исполнительного органа. При работе устройства сигнал об ошибке регулирования с выхода первого блока сравнения поступает на фильтр низкой частоты, где подавляется высокрчастотная измерительная помеха, а затем на обратную модель объекта без учета запаздывания Выходной сигнал обратной модели объекта вычитается во втором блоке сравнения из выходного сигнала- блока задержки о величине управляющего воздействия, задержанного на интервал времени запаздывания , в результа те чего получается сигнал о запаздывающей оценке идеального управления Этот сигнал зкстраполируется на предстоящий момент управления и подается на исполнительный орган. 2. Недостаток известного регулятора ; заключается в низкой точности регулирования из-за низкого быстродей;ствия исполнительного органа. Целью изобретения является повышение точности регулиро1вания. Поставленная цель достигается тем, что в регулятор, содержащий первый экстраполятор, последовательно включенные первый блок сравнения, первый фильтр низкой частоты, обратную модель объекта и второй блок сравнения, второй вход которого соединен с вы ходом блока задержки, выход экстра- , полятюра подключен к входу первого исполнительного органа, введены задатчик, последовательно включенные второй фильтр низкой частоты, третий блок сравнения, третий фильтр низкой .частоты, второй экстраполятор, ограничитель, второй исполнительный орган и сумматор, последо- . зательно включенные блок определения модуля, масштабирующий блок и . четвертый блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с вторым входом ограничителя, выход второго блока сравнения соединен с вторым входом . третьего блока сравнения и входом второго фильтра низкой частоты, вы- ; ход которого подключен через первый , экстраполятор к входу блока определения модуля, выход первого исполнительного органа соединен с вторым входом сумматора, подключе;нного сво- . им выходом к входу блока задержки. В предлагаемом адаптивном устройстве сигнал об оценке и/1еапьного управляющего воздействия расщепляется на низко- и высокочастотнуюСоставляющие, которые экстраполируются: i и направляются на реализацию соот- : ветственно в медленно- и быстродей- , ствующий исполннтел1 ные органы. В результате повышается точность регулирования. Кроме того, адапти- ; руется зона ограничения сигнала о высокочастотнсии управляквдем воздействии в зависимости от величины сигнала о низкочастотном управляющем воздействии, что дает возможность ограничивать ресурсы на управление. На чертеже приведена блок-схема, предлагаемого устройства, - Адаптивное устройство для регулирования объектов с запаздыванием содержит первый блок 1 сравнения, первый фильтр 2 низкой частоты, обратную модель 3 объекта , второй блок 4. сравнения, второй фильтр 5 низкой частотыг первый .экстрешоля- : тор 6, первый исполнительнйй орган 7 блок 8 Определения модуля, масштабир5пощий блок 9, четвертый блок 10
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивная двухцелевая система управления | 1982 |
|
SU1100608A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью | 1987 |
|
SU1476432A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
АДАПТИВНОЕ УСТРОЙСТВО ДЛЯ I РЕГУЛИРОВАНИЯ ОБЪЕКТОВ С ЗАПАЗДЫВА. НИЕМ, содержащее .первый экстраполятор и последовательно соединенные первый блок сравнения, первый фильтр низкой частоты, обратную модель объекта и второй блок сравнения, второй вход которого соединен с вы-. ходом бло.ка задержки, выход первого fS ff :л ..;: :Ч . ..J-- -5 Vi j экстраполятора подключен к входу первого исполнительного органа, о тличающеес-я тем, что, с -. . целью повышения точности регулиров-ания, в него введены задатчик, после,довательно включенные второй фильтр низкой частоты, третий блок сравне: НИИ, третий фильтр низкой частоты, второй экст.раполятор, ограничитель, : второй иополиительный орган и сумматор, последовательно включенные блок определения, модуля, масштабиру: ющий. блок и четвертый блок сравнения, второй вход которого соединен с вы ходом задатчика, а выход - с вторым входом ограничителя, выход второг.р блока сравнения соединен с вторым . .входом третьего блока сравнения и (Л : входом второго фильтра низкой частоты, выход которого подключен через ,:первый экстраполятор к входу блока I (Определения модуля, выход первого исполнительного органа соединен с .вторым входом сумматора, подключен. ного своим выходом к входу блока задержки. . . , 4 00 СП со 4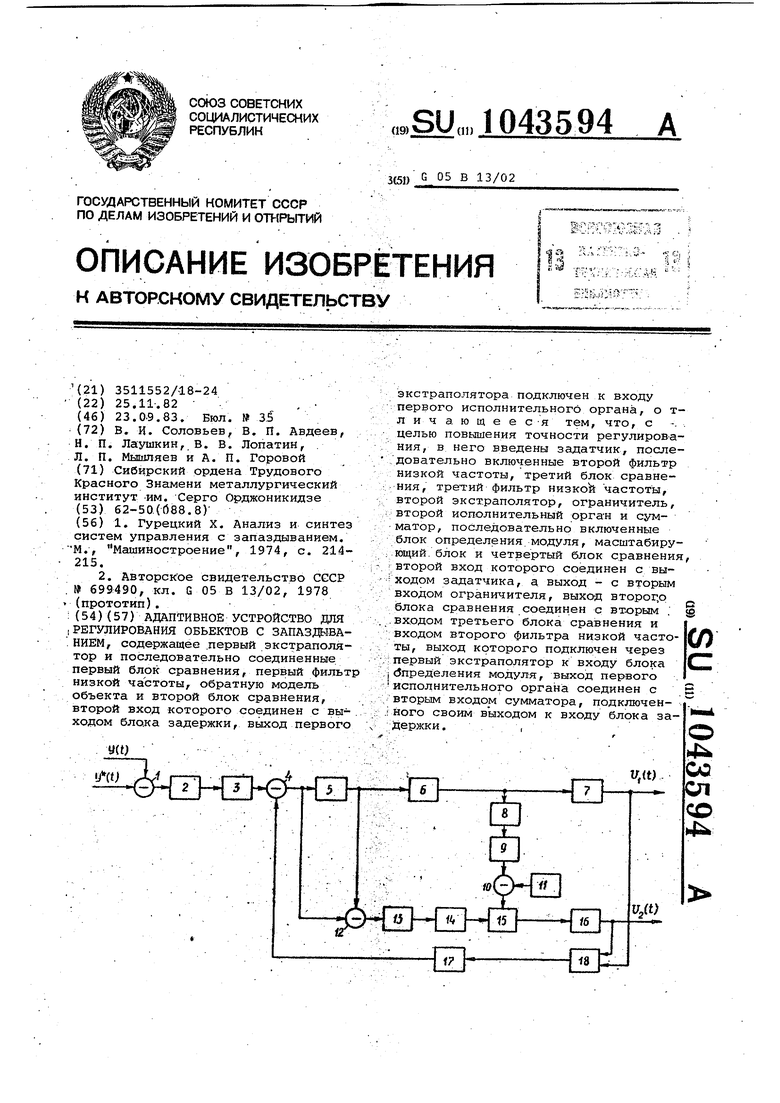
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Турецкий X | |||
| Анализ и синтез систем управления с запаздыванием | |||
| -М., Машиностроение, 1974, с | |||
| ПЛУГ ДЛЯ ПАХОТЫ С ГЛУБОКОЙ ЗАПАШКОЙ РАСТИТЕЛЬНОЙ МАССЫ И ЕЕ ОСТАТКОВ | 1966 |
|
SU214215A1 |
| Регулятор | 1978 |
|
SU699490A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| : | |||
