Изобретение относится к области самонастраивающихся систем управления и может быть использовано в сис темах управления техническими объектами для построения контуров компенсации контролируемых возмущений. Динамика объекта по каналам регулирования достаточно хорошо аппро симируется оператором N(. коэффициент усиления К и постоянные времени Т ис которого меняются незначительно. Объект подвержен влиянию контролируемых возмущений, стат стические характеристики которых нестационарны, Управлякнцие воздейст вия наносятся на объект в виде импульсов. При этом контролируемые возмущения поступают на объект как в моменты нанесения импульсов управ ляющих воздействий, так и на интервалах времени между соседними им пульсами управляющих воздействий. Задача управления заключается в обеспечении инвариантности регулиру емой координаты от контролируемых возмущений. Примером такого рода объекта является современная доменная печь с конвейерной подачей шихтовых матери алов на колошник печи, если рассмат ривать задачу компенсации контролируемых возмущающих воздействий на тепловое состояние доменного процес са, вносимых шихтовыми материалами, изменением расхода кокса.Контролируе мыми возмущениями в данном случае явля ются ошибки дозирования железорудны материалов (агломерата, окатьш1ей, руды) и отклонения параметров качества материалов (содержания железа в железорудных материалах, влажности и зольности кокса, крупности и т.п.) от заданных уровней. Управлением является изменение расхода кокса. Шихтовые материалы поступают в доменную печь импульсамипорциями, например порция кокса, порция агломерата и т.д., при этом контролируемые возмущения поступают в печь вместе с каждой порцией материалов, а управляющее воздействие (изменение массы порции кокса) нано сится либо через порцию, либо более сложным образом. Статистические характеристик контролируемых.возму31щений нестационарны вследствие того, что порядок загрузки различных материалов меняется, меняется их качество и характеристики дозирующих устройств. Один из подходов в таких ситуациях заключается в следующем: функционирование объекта разбивается на технологические циклы - интервалы времени, для которых соотношение между суммарными (в рамках одного цикла) длительности поступления на объект контролируемых возмущений и управляющих воздействий сохраняется приблизительно неизменным от цикла к циклу; управляющее воздействие, направленное на компенсацию контролируеьИ)1х возмущений, рассчитывается на технологический цикл в целом, например прогнозируется на будущий цикл по результатам прошедших технологических циклов. Затем это суммарное воздействие распределяется на отдельные импульсы, реализуемые в рамках одного технологического цикла. Известно устройство для многокомпактного порционного дозирования, содержащее порционные тензометрические дозаторы, блоки коррекции производительности, блок коррекции соотношения компонентов, содержащий задатчики порций, блоки сравнения, датчики числа порций в цикле, датчик химсостава рудного компонента, делитель соотношения рудной и топливной частей шихты, суммирующие счетчики накопления ошибок набора порций, делитель соотношения ошибок рудной и топливной частей набора порций, вычитатель и делитель на число порций топливного компонента, узел коррекции по влажности, содержащий датчик многократного измерения влажности и элемент усреднения с умножением на переводной эмпирический коэффициент. Устройство осуществляет компенсацию контролируемых возмущений, исходя из поддержания заданного соотношения топливной и рудной частей шихты в рамках технологического цикла l . Недостатком данного устройства является низкая точность регулирования, которая обусловлена тем, что не учитываются нестационарность статистических свойств контролируемых возмущений и ошибки экстраполяции управляющих воздействий и возможность их компенсации.
Наиболее близким к изобретению по технической сущности является адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений-, содержащий последовательно соединенные фильтр низкой частоты, обратную модель объекта без запаздывания и первый блок сравнения, последовательно соединенные экстраполятор, блок задержки, второй блок сравнения и блок адаптации, выход которого соединен с первым входом экстраполятора вторым входом подключенного к второму входу второго блока сравнения, первые масштабирующие блоки, выходы которых связаны с первыми входами первого сумматора, второй масштабирующий блок, исполнительный блок и последовательно соединенные третий масштабирующий блок и второй сумматор. Регулятор предназначен для компенсации как контролируемых, так и неконтролируемых возмущений 2 .
С точки зрения подавления контролируемых возмущений известный регулятор имеет невысокую точность регулирования, так как не учитываются импульсный характер нанесения на объект управляющих воздействий и нестационарность статистических свойст контролируемых возмущений.
Целью изобретения является повышение точности регулятора.
Цель достигается тем, что в адаптивный прогнозирующий регулятор для компенсации контролируемых вoз yщeний введены прямая модель объекта без запаздывания, интегратор с обнулением и блок синхронизации, вход прямой модели объекта без запаздывания связан с выходом первого сумматора, а выход - с информационным входом фильтра низкой частоты, выход которого подключен к входу третьего масштабирующего блока, вход экстраполятора .соединен с выходом первого блока сравнения, а выход - с вторым входом второго сумматора, выход которого через второй масштабирующий блок и исполнительный блок связан с информационным входом интегратора с обнулением и вторым входом первого сумматора, второй вход первого блока сравнения подключен к выходу интегратора с обнулением, а выход
блока синхронизации соединен с управляющими входами фильтра низкой частоты и интегратора с обнулением.
Функционирование объекта представляется в виде последовательности технологических циклов с известной длительностью. В течение текущего технологического цикла сигналы о контролируемых возмущениях, поступающих на объект, пересчитываются в масштаб управляющих воздействий, затем складываются между собой и с фактически реализованными управлениями и поступают на вход прямой модели объекта без запаздывания. Выход этой модели характеризует изменение ошибки компенсации контролируемых возмущений. Далее зта ошибка усредняется в рамках текущего технологического цикла. По завершению цикла с помощью обратной модели объекта без запаздывания рассчитывается суммарная корректировка управляющего воздействия,которая вычитается из суммарного на данном технологическом цикле реализованного управления. В результате с запаздыванием определяется требуемое (идеальное) суммарное управляющее, воздействие, своевременная реализация которого скомпенсирует в среднем контролируемые возмущения. Найденное идеальное суммарное управляющее воздействие экстраполируется на будущий технологический цикл. Средние на прошедшем технологическом цикле ошибки компенсации контролируемых возмущений подавляются путем прямого пересчета в управляюш,ее воздействие с помощью масштабирующего блока. Обе составляющие управления суммируются, а затем расчленяются на заранее заданное число импульсов управления, реализуемых, в пределах будущего технологического цикла.
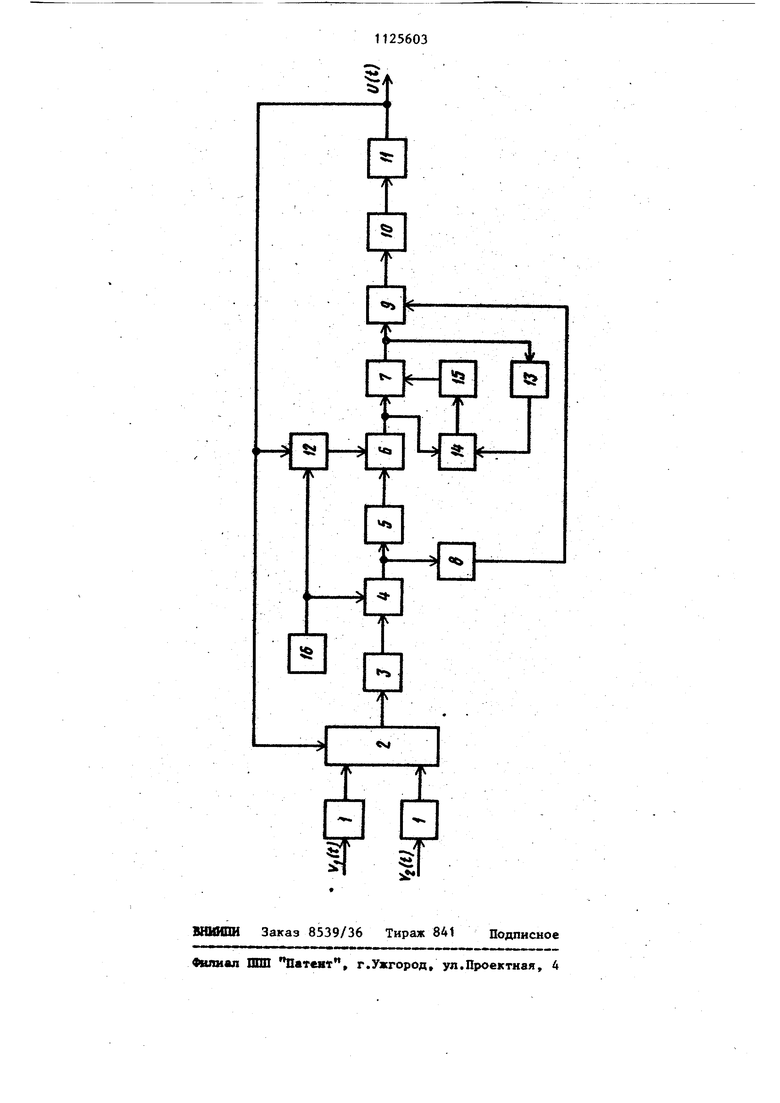
На чертеже приведена блок-схема предлагаемого регулятора.
Регулятор содержит первые масштабирующие блоки 1, первый суммат.ор 2, прямую модель 3 объекта без запаздывания, фильтр 4 низкой частоты, обратную модель 5 объекта без запаздывания, первый блок 6 сравнения, экстраполятор 7, третий масштабирующий блок 8, второй сумматор 9, второй масштабирующий блок 10, исполнительный блок 11, интегратор 12 с обнулением, блок 13 задержки, второй
блок 14 сравнения, блок 15 адаптй ции, блок 16 синхронизации. Кроме того, V,(t) и V2(i) - контролируемые возмущения; 11(1) - управляющее воздействие.
Регулятор работает следующим образом.
На входы И первых масштабирующих блоков 1 (на чертеже П 2) поступают сигналы о контролируемых возмуще ниях V,(t) и Vj (t), умножаются на заданные коэффициенты и, таким образом, пересчитываются в масщтаб управляющего воздействия.В сумматоре 2 сигналы с выходов первых маештабйрующих блоков 1 складываются меду собой и с фактически реализованным управлякмцим воздействием, сигнал о котором поступает на второй вход сумматора 2 с выхода исполнительного блока 11. G выхода сумматора 2 на вход прямой модели 3 объекта без запаздывания, в частности интегратора, охваченного отрицательной обратной связью, поступает сигнал об эквивaлeнтнo (в масштабе управляющего воздейтсвия) нескомпенсированном контролируемом возмущении. С помощью прямой модели 3 объекта без запаздывания определяются ошибки компенсации эквивалентного возм пцения в масштабе выходной переменной объекта, которые, поступая на информационный вход фильтра 4 низкой частоты, усредняются в этом фильт1)е в рамках текущего технологического цикла.
В интеграторе 12 с обнулением накапливается суммарное на данном технологическом цикле фактически реализованное управляющее воздействие.
Сигналы о завершении технологических циклов подаются блоком 16 Синхронизации. Они поступают на управляющие входы фильтра 4 низкой частоты и интегратора 12 с обнулением. Фильтр 4 низкой частоты завершает по этому сигналу усреднение ошибок компенсации контролируемых возмущений и запу ;кает в работу блоки регулятора с 5 до 11. Сигнал с выхода фильтра 4 низкой частоты поступает на вход обратной модели 5 объекта без запаздывания, которая представляет собой, например, последовательное соединение блока задержки масштабирующего блока и блока сравнения, второй вход которого связан с входом блока задержки, и преобразуется с ее помощью в величину суммарной на завершившемся технологическом цикле корректировки управляющего воздействия. Полученная корректировка вычитается в первом блоке 6 сравнения из накопленного в интеграторе 12 фактически реализованного на данном технологическом цикле управляющего воздействия, в результате получается с запаздыванием суммарное требуемое (идеальное) на прошедшем технологическом цикле управляющее воздействие. Величина зтого запаздывания О равна сумме длительности одного технологического цикла и времени запаздывания реализации управлякмцих команд исполнительным блоком. После расчета идеального управления интегратор 12 с обнулением обнуляется.
В зкстраполяторе 7 сигнал об идеальном управляющем воздействии экстраполируется на время б. Экстраполятор может представлять например, последовательно соединенные блок сравнения и дискретный интегратор, выход которого связан через блок задержки с вторым входом блока сравнения. Сигнал средней ошибки компенсации контролируемых возмущений направляется также с выхода фильтра 4 низкой частоты на вход третьего масштабирующего блока 8, где путем умножения на весовой коэффициент определяется составляющая управляющего воздействия, направленная на подавление последствия этой средней ошибки. В сумматоре 9 обе составляющие части суммарного управляющего роздействия на будущем технологическом цикле складьшаются, а во втором масштабирукицем блоке 10 путем умножения на коэффициент расчленяются на число импульсов управления, которые реализуются на предстоящем технологическом цикле. Исполнительный блок 11 в моменты реализации импульсов управляющих воздействий получает управляющие сигналы с выхода блока 10.
Для учета и компенсации изменчивости статистических характеристик контролируемых возмущений адаптируются коэффициенты экстраполятора 7.
Сигнал с выхода экстраполятора 7 поступает на вход блока 13 заде.ржки. 7 где он запоминается на время в. Во втором яблоке. 14 сравнения сигналс jвыходасблока 13 задержки вычитается гиз сигнала, поступающего с выхода ;первого блока 6 сравнения. В реэуяБтате получается сигнал ошибки экстраполяции который направляется на вход блока 15 адаптации. Вблоке адаптации реализуется например, следующая процедуру. При . условии, что оператор экстраполяции представлен в вцде экспоненциального шьтра / //ti i 6l4to IO EiL - .. : . . . где OtJ3 результат экстраполяцнн для завёршаящегося техно логического цикла; «ttj3 текунрЛ коэффициент экст раполятора, .. то адаптацию ot j можно производить по формуле 03 4j -«t{i+r6tn), 5tj i-0 i5ig«e i -5 }-i), где et У /U постоянные величины. Использование предлагаемого регулятора позволяет повысить точность регулирования за счет учета импульсного характера нанесения на объект управлякщих воздействий и нестационарности статистических характеристик контролируемых возмущений. Применение предлагаемого регулятора для компенсации контролируемых возмуп ний, вносимых в доменную печь ШИХТОВ11МИ материалами, позволит получить годовой экономический эффект в размере около 250-350 тыс.руб в год на один агрегат за счет повьшения производительности доменной печи, снижения-удельного расхода кокса и повышения качества передельного чугуна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Система управления объектом с несколькими управляющими входами | 1985 |
|
SU1287105A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью | 1987 |
|
SU1476432A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
АДАПТИВНЫЙ ПРОГНОЗИРУЮЩИЙ РЕГУЛЯТОР ,Щ1Я КОМПЕНСАЦИИ КОНТРОЛИРУЕМЫХ ВОЗМУЩЕНИЙ, содержащий последовательно соединенные фильтр низкой частоты, обратную модель объекта без запаздывания и первый блок сравнения, последовательно соединенные экстраполятор, блок задержки, второй блок сравнения и блок адаптации выход которого соединен с первым входом экстраполятора, вторым входом подключенного к второму входу второго блока сравнения, первые масштабирующие блоки, выходы которых связаны с первыми входами первого сзп4матора, второй масштабирующий блок, исполнительный блок и последовательно соединенные третий масштабирующий блок и второй сумматор, отличающийся тем, что, целью повышения точности регулятора, в него введены прямая модель объекта без запаздывания, интегратор с обнулением и блок синхронизации, вход прямой модели объекта без запаздывания связан с выходом первого сумматора, а выход - с информационным входом фильтра низкой частоты, выход которого подключен к входу третьего масштабирующего блока, вход зкстраполятора соединен с выходом первого блока сравнения, а выход - с вторым входом второго сумматора, выход которого через второй масштабирующий блок и исполнительный блок связан синформаци- онным входом интегратора с обнулением и вторым входом первого сумматора, второй вход первого блока сравнения подключен к выходу интегратора с обнулением, а выход блока синхронизации соединен с управляю щими входами фильтра низкой частоты и интегратора с обнулением.
I-I НпП гЧ
5S -- «. I Ц Ъ
-
Е-ЧЗ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для весового многокомпонентного порционного дозирования например, компонентов шихты доменного процесса | 1975 |
|
SU520516A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ЗАЖИГАНИЕМ | 2016 |
|
RU2702901C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
