(54) РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор | 1980 |
|
SU855607A1 |
| Регулятор с переменной структурой для объектов с запаздыванием | 1981 |
|
SU1004970A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Адаптивный прогнозирующий регулятор | 1982 |
|
SU1123020A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Прогнозирующий регулятор | 1979 |
|
SU815713A1 |
| Адаптивное устройство для регулирования объектов с запаздыванием | 1982 |
|
SU1043594A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения системы управления техническими объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых внешних возмушенЕЙ.
Предполйгается, что динамика объек достаточно хорошо аппроксимируется оператором
-р-с
К-е
NMCpl
Тр-1
коэффициент усиления К, постоянные времени Т и Т (- 1) которого незначительно меняются в течение длительности протекания переходного процесса, а характеристики внешних сил претерпевают существенные изменения на интервалах времени длительности порядка. Задача управления состоит в обеспечении инвариантности регулируемой координаты от внешних сил. Один из возмож
ных подходов в таких ситуациях состоит в косвенном измерении характеристик внешних сил, в проп озировании этих измерений на интервап длительности и в использовании результатов прогнозирования в функции управления.
Наиболее близким по принципу построения к изобретению является регулятор, содержащий первый элемент сравнения, звено запаздывания и последовательно соединенные обратную модель объекта без запаздывания и второй элемент сравнения. Второй вход которого соединен с выходом звена задержки 1.
Однако этот регулятор имеет малую точность регулирования.
Цель изобретения - повышен к точ- ности регулятора.
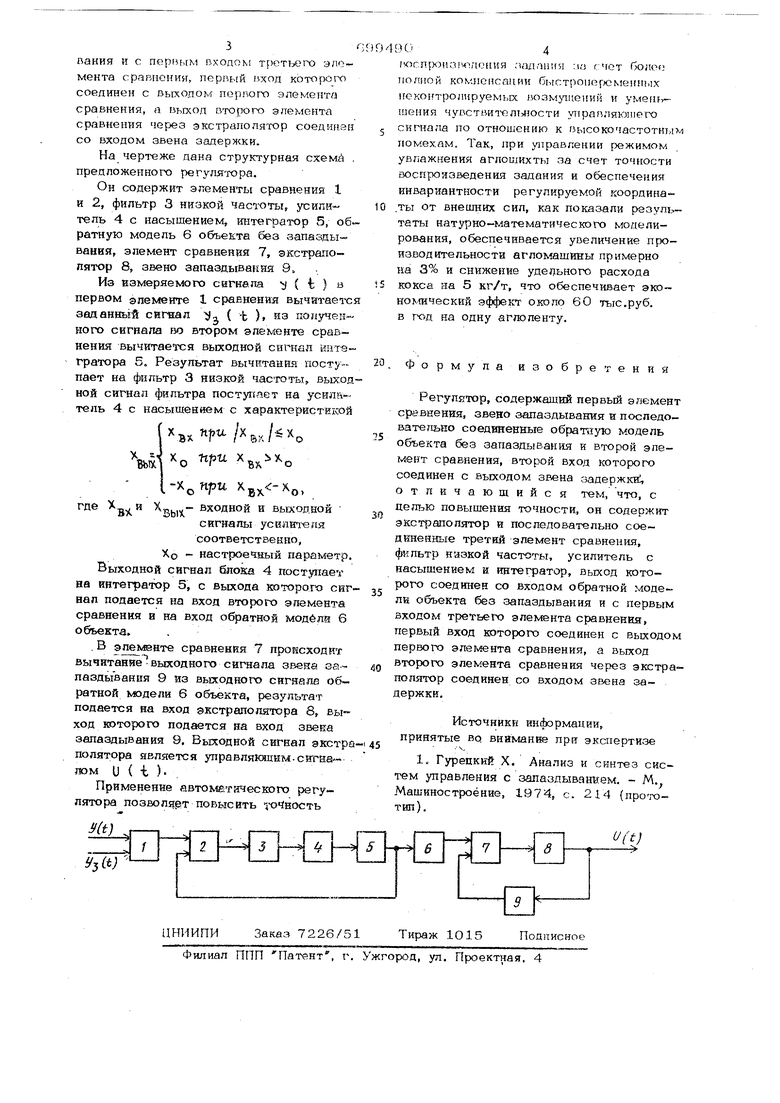
Для этого он содержит экстраполятор и последовательно соединенные третий элемент сравнения, фильтр низкой частоты, усилитель с насыщением и интегратор, выход которого соединен со входом обратной модели объекта без запазпывания и с первым входом rpeTii eix) элемента сравнения, перный вход которого соединен с выходом первого элемента сравнения, а выход второго элемента сравнения через экстраполятор соединан со входом звена задерх ки. На чертеже дана структурная схемй предложенного регулятора. Он содержит элементы сравнения I и 2, фильтр 3 НИЗКОЙ 4acit)Tbi, усипитель 4 с насыщением, miTerpaiOp 5, об ратную модель 6 объекта без запаздывания, элемент сравненкя 7, экстрапопятор 8, звено запаздывакия 9,, Из измеряемого сигнепа У ( i; ) в первом 1 сравнения вычйтае1ч; заданный сигнал - ( -fc ), из полученного с в гнала во втором эпе менте сравнения -вычитается выходной сигнал инте гратора 5, Результат вычитания поступает на фильтр 3 визкой частоты, выход ной сигнал фильтра постуг ает на усил 4тель 4 с насыщением с характеристикой , ВУ. ВЬК. в ДНОй и выходной сигналы усилителя соответственно, Ко - настроечный параметр Выходной сигнал блока 4 поступает на интегратор 5, с выхода которого си нал подается на вход второго элемента сравнения и на вход обратной модели 6 объекта. . В элементе сравнения 7 происходит вычитание-выходного сигнала звена запаздывания 9 из выходного сигнала обратной модели 6 объекта, результат подается на вход экстралопятора 8, выход которого подается на вход звека запаздывания 9. Выходной сигнал экстр полятора является управляющим.ситна- дам и ( i ). . Применение автокютяческого регулятора позволяет повысить (оЧность 04 ч сп{юпз1ч- поиия падания мо г:чот 5оло(} полкой компенсации быстроие кзмеи). 1 еконтролируем1 1х юзм 1иеиий и умешт- шения чувствителыюсти управляющего сигнала по отношению к «ьюокочастотитлм помехам. Так, при управлении режимом увлажнения аглошихты за счет точности воспрсязведения задания и обеспечения инвариантности регулируемой координаты от внешних сил, как показали р8зул1.таты натурно-математического моделирования, обеспечивается увеличение производительности агломашины примерно на 3% и снижение удельного расхода кокса яа 5 кг/т, что обеспечивает экономический эффект около 60 тыс.руб. Б год на одну аглоленту. Формулаизобретения Регулятор, содержащий первый элемент сравнения, звено запаздывания и последовательно соединенные обратггуто модель объекта без запаздывания и второй элемент сравнения, второй вход которого соединен с выходом звена задержки;, отличающийся тем, что, с делгзЮ повышения точности, он содержит экстраполятор и последовательно соединенные третий элемент сравнения, фильтр назкой частоты, усилитель с насыщением и интегратор, вьгход которого соединен со входом обратной модели объекта без запаздывания и с первым входом третьего элемента сравнения, первый вход которого соединен с выходом первого элемента сравнения, а вьосод второго элемента сравнения через экстраполятор соединен со входом звена задержки. Источники информации, принятые во внимание при экспертизе 1. Турецкий X. Анализ и синтез систем управления с запаздыванием. - М. Машиностроение, 1974, с. 214 (прототип).
