Устройства для автоматического определемия косрдилат местности, устаиавлнтзаемые на экипаже, сиабжен}1ые роликал1и со .мно- српендмкулярпымн осями, фрикционно cuгlзa: ны И с iiiapOBOii поворхHocTijio. Bpamae.vion со скоростг-ю, пропорцио.чальиой иеремеш/типо экипажа, известны.
Эти ycTpoiicTBa из-за наличия электрической схемы сложны и при измеиепии темпооат р1;; иеус1ойчивы.
В описываемом устро;1стве отеутствугт электрическая .
Ось вращения шара закреплеиа иеиодогжио отиосительио ссиовапи;-; экипажа, а оси роликов, смо;;тироваииые иа иоворотной вокруг шара платформе, могут перемеидаться относительно принятых неподвижными осей координат.
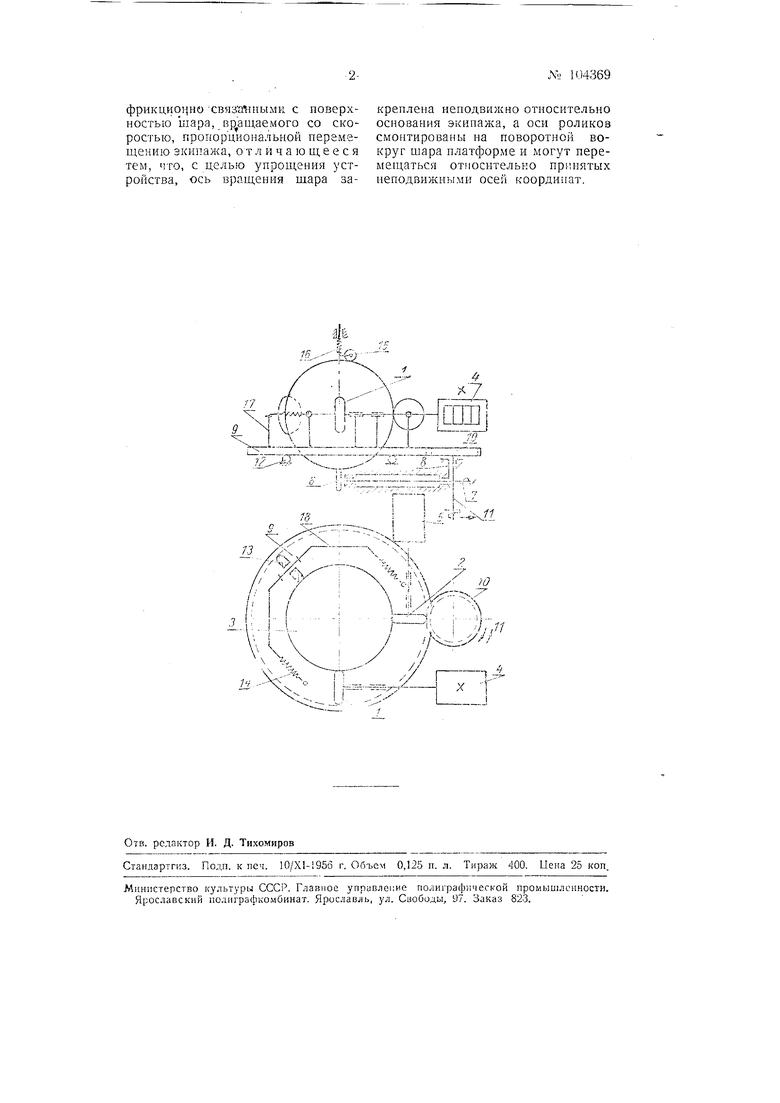
На чертеже показана схема устройства в двух проекциях. Ролики 1 и 2, нриводилмые во врап1,ение iuapOM 3, вращают счетчики 4 и 5, которые указывают величины координат местности. Шар 3 приводится во вращение роликом 6, связанным с датчиком 7 проходимого иути. Ось прпщеиия щара 3 закреиле11а неподг ижно относительно основания 8 . Оси роликоз 1 н 2 вза 1-м;1О периеидикуляр 1Ы н смомтироппны на иоворапиi5;-i Oi ieiiCM илатфорх е зубчатом которое ириводнтся во колесом 10, связанным с 11 курса.
Таким о5с;азо..;. иа счетчики 4 и 5 исре;1ается вращение щара 3, связаииое с движение:.: экипажа вперед, I новорот зубчатого колеса 9, связанный с из:.енеиием направления движения экипажа.
оинрается
колесо
на шарики 12. Для иостоянного гфижатия щара 3 к роликам 1 и 2 предусмотрены ролик 13 с пружинами 14 и ролик 15 с пружиной 16. Стойки 17 и рама 18 слу;кат для установки ролика 13.
Предмет изобретении
Устройство для автоматического определения координат местности в плане, устанавливаемое на экипаже, снабженное роликами со взаимно-перпендикулярными осями.
фрикциО1 но связаннымк с поверхностью шара, вр ащаемого со скоростью, пропорциональной перемещению экипал а, отличающееся тем, что, с целью упрощения устройства, ось вращения шара закреплена неподвижно относительно основания экипажа, а оси роликов смонтированы на поворотной вокруг шара платформе и могут перемещаться относительно прглштых неподвижными осей координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Прибор для автоматического нивелирования местности | 1948 |
|
SU86848A1 |
| Устройство для измерения высоты местности | 1951 |
|
SU101153A1 |
| Опо?iепоаi для определения координат движущегося тела и вычерчивания траектории его движения | 1950 |
|
SU96716A1 |
| Способ установки датчика угла высотомера на автомобиле | 1951 |
|
SU97981A1 |
| Цевочное зацепление | 1947 |
|
SU78561A1 |
| Геодезический нивелир-автомат на сельсинах | 1960 |
|
SU139084A1 |
| КРАН | 1972 |
|
SU427199A1 |
| Устройство для автоматической записи пройденного повозкой пути | 1936 |
|
SU49286A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ КООРДИНАТ | 1994 |
|
RU2092793C1 |
| Счетная машина для производства четырех арифметических действий | 1936 |
|
SU49493A1 |
.
Г ЫД
