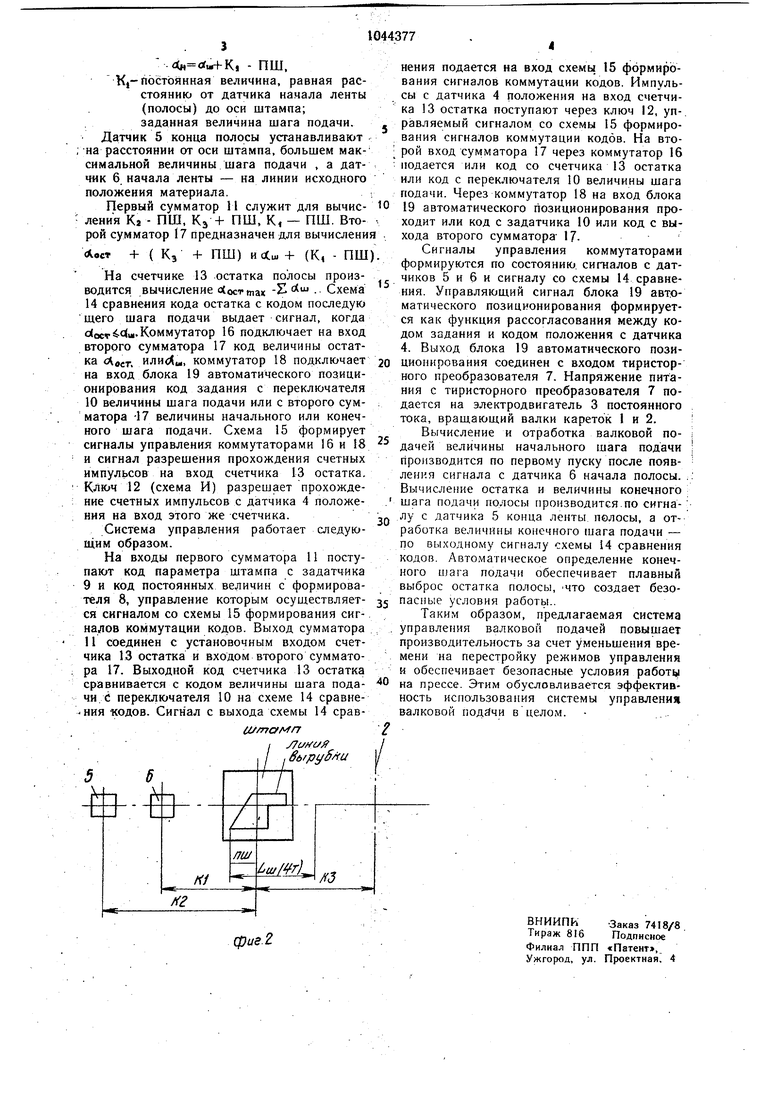
Изобретение относится к машиностроению, в частности к конструкции оборудования для обработки давлением. Известна система управления валковой подачей, содержащая датчик положения полосы и переключатель величины шага подачи, соединенные с блоком автоматического позиционирования, выход которого соединен с приводом валковой подачи I}. Недостатки известной системы управления - отсутствие контроля н автоматического управления штамповкой начала и конца полосы, выполняемого оператором при ручном управлении, что вызывает потери времени на переналадку режимов управления, а также может привести к поломке штампов. Цель изобретения - повышение производительности и надежности системы управления валковой подачей. Поставленная цель достигается тем, что система управления, содержащая датчик положения полосы и переключатель величины шага подачи, соединенные с блоком автоматического позиционирований, выход которого соединен с приводом валковой . - .. . .. подачи, снабжена датчиками начала и конца полосы, задатчиком параметров штампа, двумя сумматорами, двумя комл утаторами кодов, схемами сравнения кодов и формирования сигналов Коммутации кодов, ключом и счетчиком остатка, причем схема формирования сигналов коммутации кодов соединена с датчиками начала и конца полосы, двумя коммутаторами кодов, формирователем кодов и ключом, последний, соединен с датчиком положения полосы и входом счетчика остатка, другой вход которого соединен с первым сумматором, а выход - со схемой сравнения кодов, при этом входы первого сумматора связаны с формирователем кода и задатчиком параметров штампа, а выход - со счетчиком остатка и входом второго сумматора, другой вход которого соединен с первым коммутатором кодов,, а выход - с входом второго коммутатора, связанного другим своим входом с переключателем величины шага подачи, а выходом - с блоком автоматического позиционирования, другой вход которого соединен с датчиком положения полосы, а выход соединен с приводом валковой подачиНа фиг. 1 приведена блок-схема предлагаемой системы; на фиг. 2 - взаимное расположение элементов. Система управления валковой подачей состоит из толкающей 1 и тянущей 2 кареток, электродвигателя 3 постоянного тока, датчика 4 положения полосы, датчика 5 конца полосы, датчика 6 начала полосы, тиристорного преобразователя 7, формироватеЛЯ 8 кода постоянных величин, задатчика 9 (переключателя задания) параметров штампа, переключателя 10 величины шага подачи. Кроме того, устройство содержит первый сумматор II, ключ 12, счетчик 13 остатка, схему 4 сравнения кодов, схему 15 формирования сигналов коммутации кодов, коммутатор 16 кодов, вторбй сумматор 18 кодов и блок 19 автоматического позиционирования. Выходы задатчика 9 параметров штампа и формирователя 8 кода постоянных величин соединены с соответствующими входами первого сумматора 11. На вход формирователя 8 кода постоянных величин подключен первый выход схемы 15 формирования сигналов коммутации. Выход первого сумматора 11 соединен с установочным входом сетчика 13 остатка и с одним их входов второго сумматора 1. К второму входу сумматора 17 через первый коммутатор 16 ... подключены выход счетчика 13 остатка, з также переключатель 10 величины щага подачи. Последний связан также с входом схемы 14 сравнения и через второй коммутатор 18 с входом блока 19 автоматического позиционироваиия. Датчик 4 положеuiKct itenao tf nirit lO r nvrk лгч& гИЛГ. ния соединен через ключ 12 с входом C4etчика 13 остатка, а также с вторым входом блока 19 автоматического позиционирования. Выход счетчика 13 остатка связан с схемой 14 сравнения, подключенной к первому входу схемы 15 формирования сигналов коммутации. Второй и третий входы схемы 15 соединены с датчиками 6 и 5 начала и конца ленты соответственно, а второй, третий и четвертый выходы - с управлеяемым входом ключа 12 и входами обоих коммутаторов 16 и 18. Выходблока 19 автоматического позиционирования соединен через тиристорный преобразователь 7 с электродвигателем 3 постоянного тока привода валковой подачи. Штамп располагается на оси вырубки. В системе управления автоматически производится вычисление начального шага подачи о1н, остатка ленты otecT и конечного шага подачил. Указанные величины вычисляются по следующим формулам (фиг. 2): Лоет X.oCrmгaC Л f ОСоетт«к Кд-ПШ, где «XT - отрабатываемая величина шага подачи; - постоянная величина равная расстоянию от датчика конца ленты (полосы) до оси штампа (оси вырубки); ПШ-параметр штампа, величина которого равйа расстоянию от переднего фронта линии вырубки до оси штампа; . Я« оег+Кз + ПШ, Hj-постоянная величина, равная расстоянию от оси штампа до оси тянущей каретки; сО,Лш+К, - ПШ. Kj-Постоянная величина, равная расстоянию от датчика начала ленты (полосы) до оси штампа; заданная величина шага подачи. Датчик 5 конца полосы устанавливают : на расстоянии от оси штампа, большем максимальной величины шага подачи , а датчик 6 начала ленты - на линии исходного положения материала. Первый сумматор 11 служит для вычисления KJ - ПШ, Кэ + ПШ, К, - ПШ. Второй сумматор 17 предназначен для вычислени Лоет + ( Кз + ПШ) иоСш + (К, - ПШ На счетчике 13 остатка полосы производится вычисление о(осттах - Схема 14 сравнения кода остатка с кодом последую щего шага подачи выдает сигнал, когда с(.Коммутатор 16 подключает на вход второго сумматора 17 код величины остатка «Лойт, илисДи, коммутатор 18 подключает на вход блока 19 автоматического позиционирования код задания с переключателя 10величины шага подачи или с второго сумматора -17 величины начального или конечного шага подачи. Схема 15 формирует сигналы управления коммутаторами 16 и 18 и сигнал разрешения прохождения счетных импульсов на вход счетчика 13 остатка. Ключ 12 (схема И) разрешает прохождение счетных импульсов с датчика 4 положения на вход этого же счетчика. Система управления работает следующим образом. На входы первого сумматора 11 поступают код параметра штампа с задатчика 9 и код постоянных величин с формирователя 8, управление которым осуществляется сигналом со схемы 15 формирования сигналов коммутации кодов. Выход сумматора 11соединен с установочным входом счетчика 13 остатка и входом второго сумматора 17. Выходной код счетчика 13 остатка сравнивается с кодом величины шага подачи. С переключателя 10 на схеме 14 сравнеНия кодов. Сигнал с выхода схемы 14 сравUff7Cf/ f7I .//«Vi/ f нения подается на вход схемц 15 формирования сигналов коммутации кодов. Импульсы с датчика 4 положения на вход счетчика 13 остатка поступают через ключ 12, уп-. равляемый сигналом со схемы 15 формирования сигналов коммутации кодов. На второй вход сумматора 17 через коммутатор 16 подается или код со счетчика 13 остатка или код с переключателя 10 величины шага подачи. Через коммутатор 18 на вход блока 19 автоматического позиционирования проходит или код с задатчика 10 или код с выхода второго сумматора 17. Сигналы управления коммутаторами формируются по состоянию, сигналов с датчиков 5 и 6 и сигналу со схемы 14 сравнения. Управляющий сигнал блока 19 автоматического позиционирования формируется как функция рассогласования между кодом задания и кодом положения с датчика 4. Выход блока 19 автоматического позиционирования соединен с входом тиристорного преобразователя 7. Напряжение питания с тиристорного преобразователя 7 подается на электродвигатель 3 постоянного тока, вращающий валки кареток 1 и 2. Вычисление и отработка валковой подачей величины начального шага подачи производится по первому пуску после появления сигнала с датчика 6 начала полосы. Вычисление остатка и величины конечного шага подачи полосы производится.по сигналу с датчика 5 конца ленты полосы, а отработка величины конечного шага подачи - по выходному сигналу схемы 14 сравнения кодов. Автоматическое определение конечного шага подачи обеспечивает плавный выброс остатка полосы, .что создает безопасные условия работь.. Таким образом, предлагаемая система управления валковой подачей повыц1ает производительность за счет уменьшения времени на перестройку режимов управления и обеспечивает безопасные условия работц на прессе. Этим обусловливается эффектиВ ность использования системы управления валковой подачи вцелом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для программного управления | 1986 |
|
SU1315940A2 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Способ старт-стопного управления шаговым двигателем | 1986 |
|
SU1363417A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Устройство для цетрализованного контроля | 1976 |
|
SU661515A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Токарно-винторезный станок | 1987 |
|
SU1526954A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Кодек для передачи информации с помощью имитостойких последовательностей сигналов сложной формы | 1987 |
|
SU1451719A1 |
| Тренажер сварщика | 1984 |
|
SU1217151A1 |
СИСТЕМА УПРАВЛЕНИЯ ВАЛКОВОЙ ПОДАЧЕЙ, содержащая датчик положения полосы и переключатель величины шага подачи, соединенные-с блокам автоматического позиционирования, выход которого соединен с приводом валковой подачи, отличающаяся тем, что, с целью повышения производительности за счет исключения потерь времени на переналадку, а также йаДежности, она снабжена датчиками начала и конца., полосы, задатчйком параметров дитампа, двумя сумматорами. двумя коммутаторами кодов, схемами сравнения кодов и формирования сигналов коммутации кодов, ключом и счетчиком остатка, причем схема формирования сигналов коммутации KO.IOB соединена с датчиками начала и конца полосы, двумя коммутаторами кодов, формирователем и ключом, последний соединен с датчиками положения полосы и входом счетчика остатка, другой вход которого соединен с первым сумматором, а выход - со схемой сравнения кодов, при этом входы первого сумматора связаны с формирователем когда и задат чиком параметров штампа, а выход - со счетчиком остатка и входом второго сумматора, другой вход которого соединен с первым коммутатором кодов, а выход - с входом второго коммутатора, последний связан другим своим входом с переключателем величины шага подачи, а выходом - с блоком автоматического позиционирования, другой вход которого соединен с датчиками положения полосы, а выход соединен с приводом валковой подачи.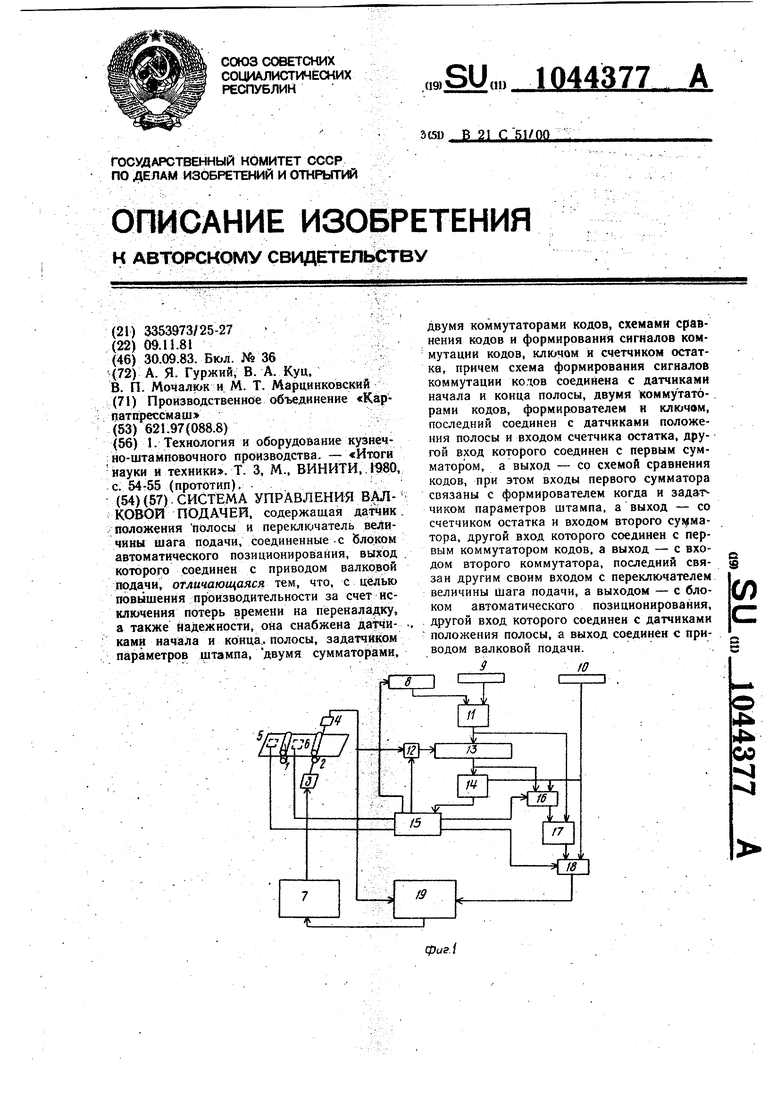
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Технологня и оборудование кузнечно-штамповочного производства | |||
| - «Итоги науки и техники | |||
| Т | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М. | |||
| ВИНИТИ. | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
