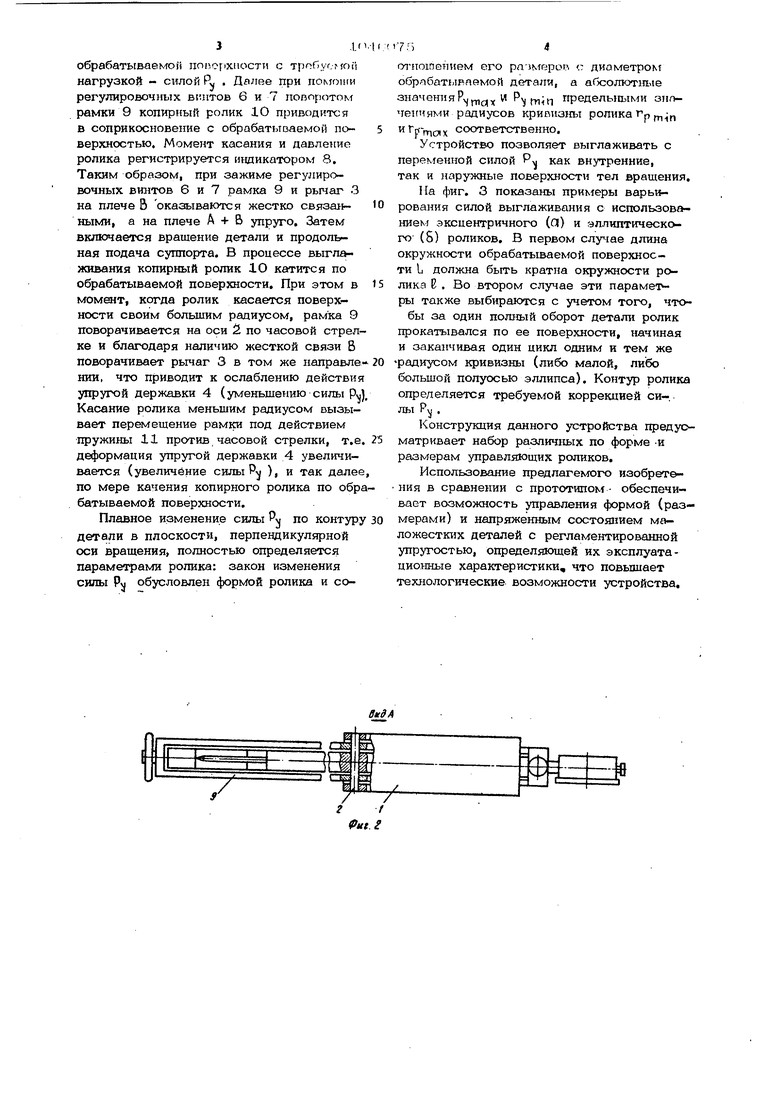
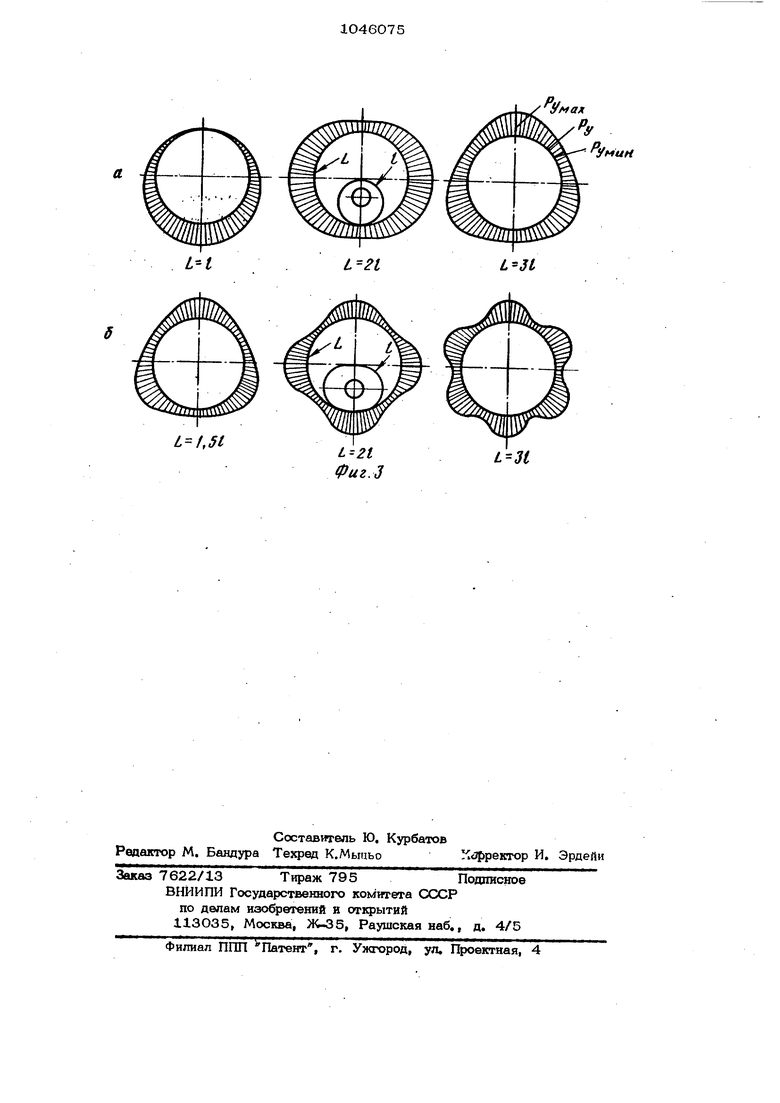
г/ / / ввраУвтыввгт i мвемнвпг F /iy/f//////y/CMy//yjy//y/y/ /77//y/jjy//f ///7ffZ/w7///y////7//3 ///jj /////7yA Изобретение относится к устройс:тиа,5 для чистовой обработки деталей в машиностроении, а именно к устройствам для обработки деталей поверхностным пластическим деформированием (например, алмаэным выглаживанием), и может быть использовано в любых отраслях машиностроения, наиболее предпочтительно в производстве маложестких и тонкостенгных деталей с регламентированным капряженным состоянием. Примером таких деталей могут быть ра-зличные пружины, мембраны, уплотнения и, в частности, поршневые кольца, широка применяемые в автомобильной, авиационной промьшьлешюсти, в производстве сельскохозяйст вершой техники и т.д. При изготовлении их нагартовкой (например, выглаживанием) с целью придания упругости и необходимой формы или коррекции этой фор мы требуется изменять интенсивность де формирутошей силы (силы выглаживания) в процессе обработки. Известно ycTpoiicTBO для выглаживания,- содержащее полый корпус, внутри которого расположен двуплечий рычаг, на одном конце которого упруго установлен деформирующий элемент, а другой расположен с возможностью взаимодействия с размещенными противоположно друг относительно друга двумя регулировочными BHHTaivffl и И1шикатором l . Недостатком известного конструктивно го решения якпяется ограниченность техн логических возможностей - примерение устройства только для гладкого выглаживания с постоянной силой, а также неэффективность использования его для обработки указанных деталей. Цель изобретения - расш фение технологических возможностей. Цель достигается тем, что устройство для выглаживания, содержащее полый корпус, внутри которого расположен ивуплечий рычаг, на одном плече которого установлен упругий деформирующий элемент, а другое плечо расположено с возмолшостью взаимодействия с разм&щенными противоположзю друг относительно друга регулировочными винтами и индикатором, снабжено установленной в полом корпусе с возмой ностью поворота относительно (х:и рычага охватывающей рычаг рамкой с копирным роликом, размещенным перец дефоркмиругощим элементом, и пружиной, раоположенной в корпусе со стороны регул РОВОЧ1ЫХ ВИ11ТОВ с вoз «зжнocтью взаимодействия со вторым плeчo f p.rjo.ra, iipvi этом регулировочные винты, устинов-чопы в упомянутой рамке. }{а фиг. 1 дано устройство, общий вид; па фиг„ 2 - вид А на фиг. J.; на фиг. 3 - варианты вьп1олнения копирного ролика. YcTpoifcTBO содержит полый корпус 1, внутри которого на оси 2 расположен двуплечий рычаг 3, на одном плече которого на упругой державке 4 установлен деформирующий элемент 5, а другое плечо расположено с возможностью взаимодействия с размеще1шыми противоположно друг относительно друга двумя регулировочными винтами 6 и 7, и индикатор 8. На сх:и 2 в полом корпусе 1 смонтирована рамка 9, охватывающая рычаг 3, с копирным роликом 10, расположенным перед деформирующим элементом 5 со стороны регулировочных винтов 6 и 7, установленных на рамке 9. В корпусе 1 помещена пружина 11, например плоская. Таким образом, в конструкции можно выделить три плеча действия А , Б , . Для устранения погрешности в контроле силы Р , вызываемой взаимовлиянием упругой державки 4 и плоской пружины 11, тарировка устройства производится в сборе (в рабочем состоянии) извест ным способом, Копирный ролик 10 имеет профиль и размеры (соотношение радиусов его кривизны и диаметра, обрабатываемой детали), соответствующие требуемому характеру изменения силы Р . Например, ролик может быть эллиптическим, эксцентричным, иметь некоторую огранку и т.д. С целью гарантирования эффективной работы устройства на малых силах выглаживания (на участках, где Pw Р,(,), т. е. предотвращения отрыва инструмента от выглаживаемой поверхности при колебаниях державки вокруг оси 2, упругость пружины 11 должна быть в 1, 5-2 раза больше упругости державки 4. Устройство работает следующим образом.; Устройство закрепляется на суппорте токарного станка посредством корпуса 1. Регулировочные винты 6 и 7 выворачиваются, осврбождая жесткую связь рычага 3 с рамкой, благодаря чему копирный ролик 10 отводится от обрабатываемой поверхности. Перемещением cymiopvта станка в поперечном направлении д формирующий элемент 5 при а1Ь1ает(;я к 3.1,(1 обрабатываемой пш огхиости с ( нагрузкой - силой Я . Далее при помощи регулировочных винтов 6 и 7 поворотом рамки 9 копирный ролик Ю приводится в соприкосновение с обрабатываемой поверхностью. Момент касания и давление ролика регистрируется индикатором 8. Таким образом, при зажиме регулировочных винтов 6 и 7 рамка 9 и рычаг 3 на плече В оказываются жестко связшьными, а на плече А + В упруго. Затем включается вращение детали и продольная подача суппорта. В процессе выглаживания копирный ролик 10 катится по обрабатываемой поверхности. При этом в момент, когда ролик касается поверхности своим большим радиусом, рамка 9 поворачивается на оси 2 по часовой стрелке и благодаря наличию жесткой связи Б поворачивает рычаг 3 в том же направле НИИ, что приводит к ослаблению действия упругой державки 4 (уменьшению силы Рх, Касание ролика меньшим радиусом вызывает перемещение рамки под действием пружины 11 против, часовой стрелки, т.е деформация упругой державки 4 увеличивается (увеличение силыР ), и так дале по мере качения копирного ролика по обр батываемой поверхности. Плавное изменение силы Р по контур детали в плоскости, перпендикулярной оси вращения, полностью определяется параметрами ролика: закон изменения силы РЧ обусловлен формой ролика и сотношением его рачмрфов с диаметром брлбатырпемой детали, а аГхзолюттю наченияРч, ( предельными зн еинями радиусов кривизны ролика Гр , иГгггт,о,х соответственно. Устройство позволяет выглаживать с переменной силой Р как внутренние, так и наружные поверхности тел вращения. Па фиг. 3 показаны примеры варьирования силой выглаживания с использованием эксцентричного (01) и эллшггического (8) роликов. В первом случае длина окружности обрабатываемой поверхности L должна быть кратна окружности ролика В . Во втором случае эти параме-рры также выб1фаются с учетом того, чтобы за один полный оборот детали ролик прокатывался по ее поверхности, начиная и заканчивая один цикл одним и тем же радиусом кривизны (либо малой, либо большой полуосью эллипса). Контур ролика определяется требуемой коррекцией силы Р( . Конструкция данного устройства предусматривает набор различных по форме -и размерам управляющих роликов. Использование предлагелтого изобрете ния в сравнении с прототипом обеспечивает возможность управления формой (размерами) и напряженным состоянием маложестких деталей с регламентированной упругостью, определяющей их эксплуатационные характеристики, что повышает технологические возможности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Инструмент для поверхностного деформировани | 1989 |
|
SU1699761A1 |
| Устройство для фрикционно-механического нанесения покрытий | 1983 |
|
SU1079697A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТНЫМ ПЛАСТИЧЕСКИМ ДЕФОРМИРОВАНИЕМ | 2008 |
|
RU2348504C1 |
| ИНСТРУМЕНТ ДЛЯ УПРОЧНЯЮЩЕЙ ОБРАБОТКИ | 2000 |
|
RU2173628C1 |
| ДАВИЛЬНОЕ ОХВАТЫВАЮЩЕЕ УСТРОЙСТВО | 2009 |
|
RU2411099C1 |
| СПОСОБ ОХВАТЫВАЮЩЕЙ ДАВИЛЬНОЙ ОБРАБОТКИ | 2009 |
|
RU2411098C1 |
| ИНСТРУМЕНТ ДЛЯ ВЫГЛАЖИВАНИЯ | 1991 |
|
RU2014985C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ВЫГЛАЖИВАНИЕМ НАРУЖНЫХ ПОВЕРХНОСТЕЙ ВРАЩЕНИЯ | 2008 |
|
RU2348502C1 |
| Устройство для обработки деталей методом поверхностного пластического деформирования | 1980 |
|
SU931428A1 |
| ИНСТРУМЕНТ ДЛЯ ВЫГЛАЖИВАНИЯ ПРЕРЫВИСТЫХ ПОВЕРХНОСТЕЙ | 2010 |
|
RU2433900C1 |
УСТРОЙСТВО ДЛЯ ВЫГЛАЖИВАНИЯ, содержащее полый корпус, внутри которого расположен двуплечий рыЧаг, на одном плече которого установлен упругий деформирующий элемент, а другое плечо расположено с возможностью взаимодейст ВИЯ с размешенными противоположно друг относительно друга двумя регулировочными винтами и индикатором, о т л и ч а е е с я тем, что, с целью расширения технологических возможностей, оно снабжено установленной в полом корпусе с возможностью поворота относительно оси рычага охватываюшей .рычаг рамкой с кспирным роликом, размешенным перед деформируюшим элементом, и пружиной, расположенной в корпусе со стороны регулировочных винтов с возможностью взаимодействия со вторым плечом рычага, при этом регулировочные винты установлены в упом5шутой рамке. (Л
3CJ
./
/
г -t ut г
L l,5l
/Умах
Уман
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Зеликсон Г | |||
| А | |||
| и др | |||
| Чистовая обрёботка деталей приборов и машин алмазным выглаживанием | |||
| М | |||
| , НИИМАШ, 1971, с | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
