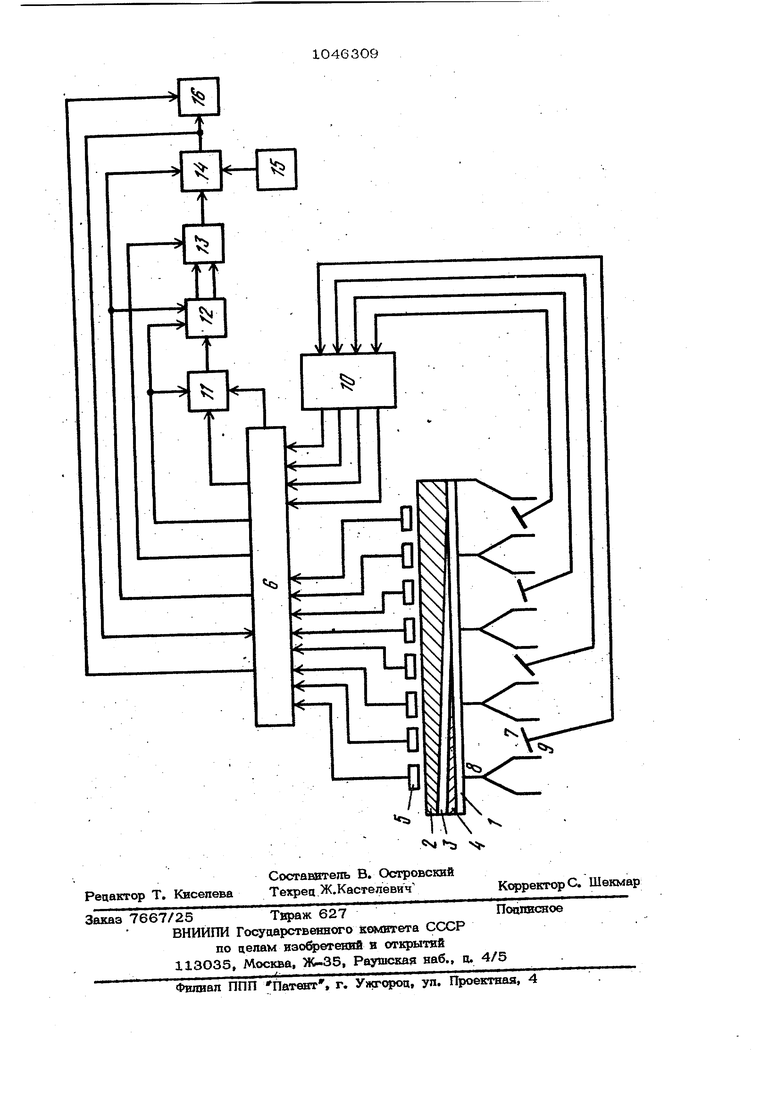
Изобретение относится к области скускования метаппургического сырья, в частности, к процессу спекания агломерационной шихты на конвейерных маши нах. Известно устройство цпя автомати . ческогоконтроля и регупирования вертикальной скорости спекания, соцержащее два цатчика магнитной проницаемости, элемент памяти, спецящее устройство, блок сравнения сигналов, усилитель, блок питания и регистрирующий прибор Известное устройство отличается сложностью, подвержено воздействию случа.йнык факторов, влияющих на точнос и достоверность контроля. Наиболее близким к изобретению по технической сущности является усрройс во ОЛЯ автоматического контроля и регу лирования окончания процесса спекания, содержащее датчики освещенности, элект ронные блоки, преобразующие и усиливаю щие сигналы датчиков, двухкаскадный дифференциальный усилитель рагист. рируюший прибор 2 3 . Датчики освещенности известного устройства расположены в стенках вакуу камер, в условиях высокой температуры и запыленной, агрессивной среды. В таких условиях работа датчиков становится недостаточно надежной, а ремонт и профилактический осмотр затруднены. Основ ным же недостатком данного устройства является недостаточная точность, так как контроль окончания процесса спекания производится с точностью до одной вакуум-камеры, что применительно к сов ременным агломерационным машинам с большой площадью спекания приводит к значительным потерям. Целью изобретения является повышение точности контроля законченности пр цесса спекания агломерационной шихты. Поставленная цель достигается тем, что устройство контроля законченности процесса спекания агломерационной шихты, содержащее датчики и задатчик периметров спекания, блок индикации, преобразователь и блок вычисления разности, снабжено датчиками положения шиберов вакуум-камер, блоком кор1$ёктировки,. датчиками скорости фильтрации воздуха, установленными по цлине агполенты, программным блоком, блоком памяти, задатчиком пфогового значения и блоком сравнения, причем выходы дар чиков положения шиберов вакуум-камер соединены с соответствующими входами блока корректировки, а выходы блока корректировки и выходы датчиков скорооти фильтрации воздуха соединены с соответствующими входами программного блока, два выкоца которого соединены с двумя входами преобразователя, выход преобразователя соединен:-, с первым входом блока памяти, два выхода блока памяти соецинены с двумя входами бпо. ка вычисления разности, входы блока индикации, количество которых равно количеству рядов датчиков скорости фильтрации воздуха, соединены с выходами программного блока, кроме того, один выход программного блока соединен с третьим входом преобразователя и вторым входом блока памяти, другой вых-од соединен с третьим входом блока вычисления разноо ти и третий выход соединен с третьим входом блока памяти, задатчиком, один вход блока логического сравнения соединен с выходом. задатчика порогового значения, третий вход соединен третьим входом блока памяти, а выход блока сравнения соединен с входом ..блока индк- кацни и входом программного блока. Разность двух последовательных значений скоростей фильтрации воздуха через один и тот же объем аглоспека, измеренных в процессе его движения на аглоленте, характеризует в зоне возмож ного окончания процесса спекания агло- мерацирнной шихты положение зоны спекания. Определенное, пороговое значение этой разности разграничивает области завершенности и незавершенности процесса спекания по длине аглоленты, поэтому сравнение текущего значения разности с его пороговым значением позволяет определить место окончания процесса спекания, за которое принимается продольная координата ряда ч.датчиков, которым производилось последнее измере.ние„ При заданной скорости аглог нты пороговое значение разности прямо пропорционально расстоянию между последовательными рядами датчиков, т. е. времени между двумя последовательными измерениями и однозначно от него зависит. Следовательно, осуществляя в пределах одной вакуум-камеры более одного измерения путем уменьшения расстояния между рядами датчиков, можно увеличить точность контроля. Пороговое значение разности определяется расчетным япи опытным путем и- устанавливается задатчиком порогового значения. На чертеже представ лена блокр-схема устройства. Процесс агпомерации на агпомераиионной центе 1 имеет в проао1тъном разрезе виц, показанный на чертеже, гае 2 спечеккая шикта, 3 - зона спекания, 4 - искоцная-шихта. Выхоц каждого ряда датчиков 5 скорости фипьтрашш воздуха соединен с соответствующим входом программного блока 6. Шибер 7 каждый вакуум-камеры 8, над которой расположены датчики скорости филътращш воздуха, снабжен датчиком 9 положения и выход каждого датчика соединен с coo ветстЪующим входом блока 10 корректировки, выходы которого соединены с входами программного блока. Два выхода программного блока соединены с соответствующими двумя входами преобр зователя 11. Выход преобразователя сое динен с входом блока 12 питания. Блок памяти имеет два выхода, соединенных с соответствующими двумя входами блока 13 вычитания разности. Выход блока вычисления разности соединен с одним входом блока 14 логического сравнения, другой вход которого соединен с выкодом задатчика 15 порогового значения разности, а выход блока логического сравнения соединен с соответствующим входом программного блока и выходом блока 16 нндикаши. Блок индикации имеет также группу входов, соединенных с соответствуюишт/ш выходами программного блока, количество которых равно количеству рядов датчиков скорости фильтрации воздуха. Программный блок имеет еще три выхода. Один из этих выходов соединен с третьим входом преобразователя и вторым входом блока пеиляти, другой , выход соединен с третьим входом блока вычисления разности, а третий соединен с третьим входом блока памяти и третьим входом блока логического сра нения. Датчики скорости воздуха измеряют скорость фильтрации воздуха через агпоспек и устанавливаются параллельно его , поверхности в зоне возможного окончани процесса спекания с заранее заданным интервалом в ряды, перпендикулярнь1е направлению движения аглоленты. В каждом ряду, с целью усреднения значений скоростей фильтрации воздуха через аглоспек по ширине аглоленты, устанавливают несколько датчиков, а над каж дои вакууг -камерой устанавливают не менее двух рядов датчиков. При каждом измерении к преобразователю подключаются выходы одного ряда датчиков. Диап 10 94 зон пзменеиий скоростей фильтрации воздуха 1-4 м/с. Датчики положенияшиберов вакуумкамер выдают сигналы о положении шиберов, характеризующих переменную составляющую газодинашиеского сопротивления системы вакуум-кам.ера - аглолента - аглоспек, кбторое определяет скорость фильтрации воздуха через аглоспек. Они вводятся в устройство с цепью приведения сигналов датчиков скорости фильтрации воздуха к одному и тому же газодинамическому сопротивлению вакуум-камеры. Программный блок обеспечивает функционирование устройства путем выдачи управляющих сигналов на блоки устройства, подключения соответствующих датчиков к преобразователю и блоку корректировки и фиксирования .результатов контроля. Преобразователь служит для преобразования аналоговых сигналов датчиков фильтрации воздуха,в цифровой коц и его корректировку по сигналу блока корректировки. Блок корректировки служит для Koppei тировки сигналов датчиков положения ш№беров - вакуум-камер с цепью их приведения к единому значению по постоянной составляющей газодинамического сопротивления вакуум-камеры,зависящей от конструктивных показателей .лина, диаметр и. т. п.) Параметры корректировки устанавливаются ; вручную. Блок представляет собой набор переменных сопротивлений, работающих в режиме делителя напряжения. Каждое сопротивление предназначено для одного датчика положения шибера. На сопротивление подается напряжение датчика, положения шибера, а сник1ается с него напряжение в зависимостз от постоянной составляющей газодинамического сопротивления вакуумкамеры. . По этому напряжению корректируется в преобразователе сигнал датчика скорооти воздуха и таким образом на выходе 1реобразователя формируется цифровой код аналогового сигнала, зависящего от положения зоны горения, характеризующей завершенность процесса спекания. Блок памяти служит для запоминания и выдачи выходного сигнала преобразс вателя. Блок ВЫЧИС11С-1ШЯ разности Вычисляв разность, без учета знака, двух последовательных значений измерений скоростей фильтрации воздуха, поступающих в вице цифровых коцов с регистров бпо ка памяти. Блок представляет собой цифровой многоразрядный сумматор не два вкода. Блок логического сравнения производит сравнение разности, попучаемой: в бпокё вщчиспения разности, с порого вым значением этой разности путем вычитания ее из порогового значения. . Результатом операции является только знак разности. Блок представляет собой арифметический сумматсф на два .вкода, работаюишй в режиме вычитания. В качестве блока может быть использован многоразрядный параллельный сумматор накапливающего типа. Задатчик порогового значения задает цифровой код псфогового значения разности двух последовательных знач&НИИ скоростей фильтрации воздуха агпоспек. Блок индикации фиксяфует и отобрвг жает место окончания процесяза спекания. Устройство работает следующим о разом. Режим работы устройства - цикпичео кий. Цикл начинается измерением скорости фильтрации воздука через аглоспе крайним, ближним к началу аглсмашины рядом датчиков 5, затем производится измерение скорости фипьтравии воздуха через один и тот же объем агпоспека последовательно каждым рядом датчико и заканчивается шскп измерением, позв ляющим определить место оконча1 ия процесса спекания, и последующими за шерациями. Время между двумя посп&довательными измерениями задается программным устройством, путем задания частоты импульсов генератора из расчета, чтобы происходило измереше скорости фильтрации воздуха через один и тот же объем аглоспека. Между двумя последовательными измерениями производятся шерашга по обработке результатов измерений. На вход преобразователя 11 подклю чается ряд датчиков скорости фильтраш воздука, под которым находится контролируемый объем аглоспека, а к блоку 10 корректировки подключается датчик 9 положения шибера соответствующей вакуумкамеры. На третий- вход преобразователя с соответствующего выхода программного блока поступает разрешающий потенциал на преобразование сигналов датчика положения шибера, поступающего с блока корректировки, и датчика скорости фильтрации воздуха, а на выходе преобразователя формируется цифровой код, зависящий только от газодинамического сопротивления аглоспека. т, е. положания зоны горения, а на второй вход блока 12 памяти поступает ра:зрешение на запись в дополнительные регистры этого блока результата преобразования.. . На третий вход блока 13 вычисления разности поступает разрешение на вычисление разности двух цифровых кодов, представляющих рееультаты двух поел довательных измерений и поступающих с двух выходов блока памяти на два входа блсжа разности и блок вычисляет эту разность.. На третий вход блока 14 логического сравне1Шя поступает разрешение на логическое сравнение, т. е. определение знака разности между цифровым кодом задатчика 15 пс оговогр значения и цифровым кодом блока разности, а на блок 16 индикации поступает признак местополохсения контролируемого обьома аглоспека, т. е, ряда датчиков, которым производилось последнее измерение. В случае положзательного знака разности процесс спекания оксжчен, блок индикации фиксирует место ок жчвния процесса спекания, а программный блок получает импульс на начало нового цикла, в случае отрицательного анака цикл контроля продолжается. Таким образоМг предлагаемое устройство позволяет определить ковтротш мео „та законченности спекания.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ КАЧЕСТВОМ АГЛОМЕРАТА | 2008 |
|
RU2375659C1 |
| Система регулирования процесса спекания | 1974 |
|
SU910810A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВУСЛОЙНОЙ ЗАГРУЗКОЙ ШИХТЫ НА АГЛОМАШИНУ | 1993 |
|
RU2035518C1 |
| Способ регулирования процесса спеканияАглОшиХТы | 1979 |
|
SU836165A1 |
| СПОСОБ КОНТРОЛЯ И УПРАВЛЕНИЯ КАЧЕСТВОМ АГЛОСПЕКА | 1997 |
|
RU2111428C1 |
| Способ регулирования процесса спекания | 1974 |
|
SU901311A1 |
| Способ контроля положения места законченности процесса спекания материала на конвейерных машинах | 1976 |
|
SU609774A1 |
| Способ автоматического регулирования процесса спекания шихты | 1987 |
|
SU1509416A2 |
| Детектор широкополосного СВЧ и УКВ сигналов и способ его работы | 2015 |
|
RU2608557C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ОГРАНИЧЕНИЯ СКОРОСТИ АВТОТРАНСПОРТНЫХ СРЕДСТВ | 2011 |
|
RU2466882C1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЗАКОНЧЕННОСТИ ПРОЦЕССА СПЕКАНИЯ АГЛОМЕРАШОННОЙ ШИХТЫ, содержащее датчики и задатчик парамет ров процесса спекания, блок индикации, преофазсжатейь и бпок вычисления раэяости, отличающееся тем, ято, с целью повышения точности контро 1Я, оно цополнитепЕьно снабжено датчика- , ми положения шиберов вакуум-камер, ; блоком корректировки, датчиками скорости фильтрации воздуха, установленными по длине аглолетггы, программным блоком, блоком памяти, задатчиком порогового значения и блоком сравнения, прочем выходы датчиков положения шиб&ров вакуум-камер соединены с соответ ствуюишми входами блока корректировки, а выходы блока корректировки и выходы датчиков фильтрации воздуха соединены с соответствуюошми входами программного блока, два выхода которого соединены с двумя входами преобразователя,выход преобразователя соединен с первым входом блока ивмягя, два выхода блока памяти соединены с I двумя входами блока вычисления разнооти, входы блока индикации, количество которых равно количеству рядов датчиков скорости фильтрации воздуха, соеоинсты с выходами программного блока, кроме того, один выход программного блока соединен с третьим входом преобразователя и вторым входом блока пам1гги, другой выход соединен с третьим входом блока вычислешгя разности и третий вьь. ход соединен с третьим входом блока памяти; задатчиком один вход блока ло гического сравнения соединен с выходом блока вычисления разности, другой вход сЬединен с выходом задатчикэ порого 3 вого значения, третий вход соединен с со третьим входсял блока памяти, а выход о блока сравнения соединен с входом бло. UD ка индикации и входом программного блока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вопков А | |||
| А | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автореф | |||
| цнс | |||
| «а соиск | |||
| учен, степени канвнта техн | |||
| наук,М., 1971, с | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Теория и практика автоматизации агломерационного проиэвоцства, Сборник прц pea | |||
| Фецоровск яго Н В., Киев, 1971, Институт автоматики, с | |||
| Пружинная погонялка к ткацким станкам | 1923 |
|
SU186A1 |
