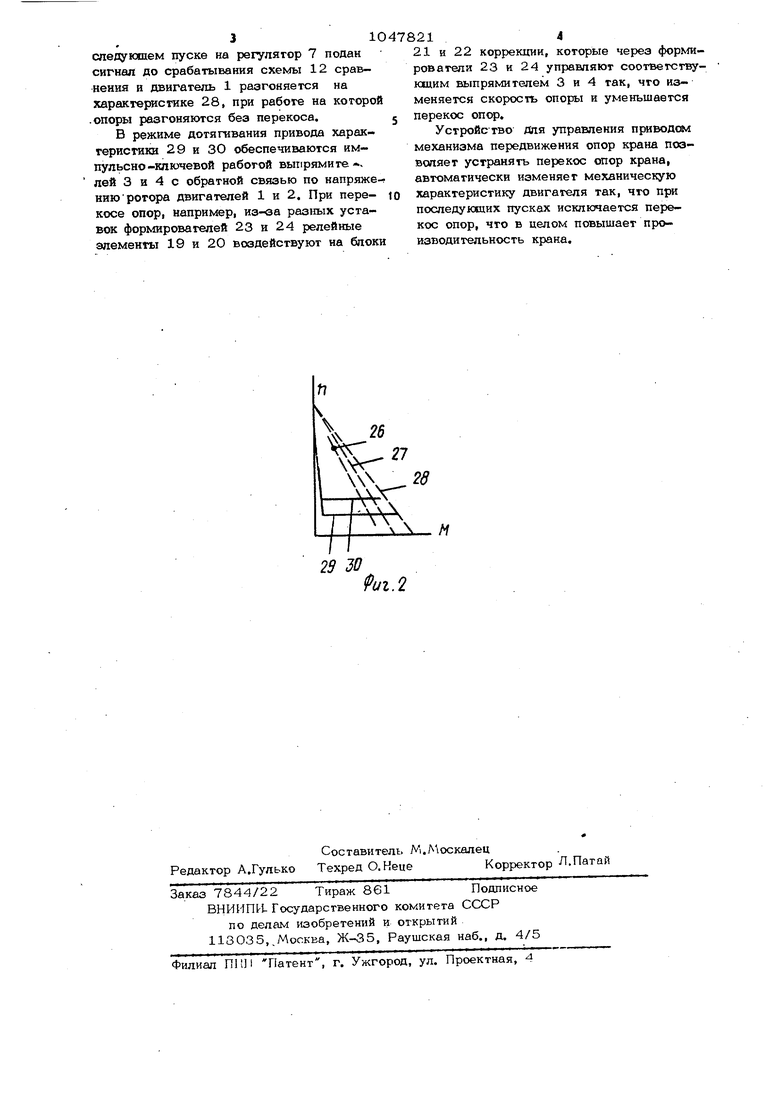
Изобретение относится к подъемко-тра спортном оборудованию, а именно к устройствам для управцення приводами механизмов передвижения опор крана, и может быть использовано дгш ограничения перекоса опор крана. Известно устройство для управления приводом механизма передвижения опор крана, содержащее асинхронные двигатели обмотки роторов которых через выпрямители по/дключевы к резисторам, связанным с регуляторами момента двигателей, одни управляющие входы которых соединены с выходами аадатчика момента двигателей, задатчик скорости, подключенный к одним входам блоков управления частотой вращения двигателей, задатчик перекоса опор и датчики пути опор, подсоединенные к входам схемы сравнения, выходы которой соединены с входами релейных элементов, одни выходы которых подключены к дру гим входам блоков управления частотой вращения.двигателей Cl . Недостатком известного устройства гшляется сравнительно низкая произво- дительность крана, обусловленная снижением средней скорости крана при выравнивании перекоса опор. Цель изобретения - повьинение производительности крана за счет ограничения перекоса его опор, Указанная цель достигается тем, что устройство для управления приводом механизма передвижения опор крана, содержащее асинхронные двигатели, обмотки роторов которых через выпрямители подключены к резисторам, связанным с реГуляторакт момента двигателей, одни управляющие входы которых соединены с выходами задатчика момента двигателей задатчик скорости, подключенный к одним входам блоков управления частотой вращения двигателей, задатчик перекоса опор и датчики пути опор, подсоединенные к входам схемы сравнения, выходы которой соединены с входами релейных элементов одни выходы которых подключены к други входам блоков управления частотой враще ния двигателей, снабжено блоками памяти входы которых подключены к другим выхо дам релейных элементов, а выходы - к другим удравляклцим входам регуляторов момента двигателей, причем управляющие входы выпрямителей подключены к выхода блоков управления частотой вращения двиг а телей. На фиг. 1 изображена принципиальная схема устройства для управления приводом механизма передвижения опор крана} на фиг. 2 - механические характеристики двигателей, Устройство для управления приводом механизма передвижения опор крана содержит асинхронные двигатели 1 и 2, обмотки роторов которых через управляемые выпрямители 3 и 4 подключены к резисторам 5 и 6, связанными с регуляторами 7 и 8 момента двигателей, например тирис торными. Одни управляющие входы регуляторов 7 и 8 соединены с выходами задатчика 9, а другие - с выходами соответствующих блоков 10 и 11 памяти. К входам схемы 12 сравнения подключены задатчик 13 перекоса опор и через усилители 14 и 15 датчики 16 и 17 пути опор. Выход схемы 12 через блок 18 регулятора выравнивания.подсоединен к входам релейных элементов 19 и 20, одни выходы которых соединены с входами блоков управления частотой вращения двигателей, представляющие Собой блоки 21 и22 коррекции, последовательно соединенные с соответствующими формирователями 23 и 24, а другие выходы элементов 19 и 2.0 соединены с входами блоков 10 и 11 памяти. Управляющие входы выпрямителей 3 и 4 подсоединены к выходам формирователей 23 и 24, одни иэ входов которых осоединены с выходами задатчикй 25 скорости, Устройство для управления приводом механизма передвижения опор крана рабо- тает следукдцим образом. Задатчики 25 и 9 определяют скорость привода и его момент. Установивщаяся частота вращения двигателей 1 и 2 одинакова, однако разных нагрузок двигателей 1 и 2 .и сопротивлений .резисторов 5 и 6 моменты двигателей 1 и 2 отличаются друг от друга (механические характеристики 26 и 27), Во время пуска опора крана с.двигателем 1, раёо-тающим на характеристике 26, отстает от споры с двигателем 2, работающим на характеристике 27, При достижении перекоса опор величины, заданной задатчиком 13, срабатывает схема 12 сравнения, и блок 18 через .релейный элемент 19 или 20 подает сигнал в блок 10 или 11. памяти, который воздействует на регулятор 7 или 8 момента таким образом, что, например, двигатель 1 отстающей опоры переходит кратко- временно на работу на механической характеристике 28, при этом двигатель 1 работает с больщим моментом и отставание его опоры при пуске выравнивается. Благодаря блоку 10 памяти, при следующем пуске на регулятор 7 подан сигнал до срабатывания схемы 12 сравнения и двигатель 1 разгоняется на характеристике 28, при работе на которой .опоры разгоняются без перекоса, В режиме дотягивания привода характеристики 29 и 30 обеспечиваются импульсно-ключевой работой выпрямите, лей 3 и 4 с обратной связью по напряжениюротора двигателей 1 и 2, При перекосе опор, например, из-ва paaiaix уставок формирователей 23 vi 24 релейные элементы 19 и 20 воздействуют на блоки 10 21 21 и 22 коррекции, которые через формирователи 23 и 24 управляют соответствующим выпрямителем 3 и 4 так, что изменяется скорость опоры и уменьшается перекос опор. Устройство Для управления приводом механизма передвижения опор крана позволяет устранять перекос опор крана, автоматически изменяет механическую характеристику двигателя так, что при последующих пусках исключается перекос опор, что в целом повышает производительность крана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для синхронного перемещения механизмов грузоподъемного средства | 1980 |
|
SU887425A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ ПЕРЕДВИЖЕНИЯ С КОРРЕКЦИЕЙ ПОПЕРЕЧНОГО СМЕЩЕНИЯ | 2015 |
|
RU2605233C1 |
| Электропривод для грузоподъемного механизма | 1980 |
|
SU989719A2 |
| Привод механизма перемещения опор мостового крана | 1985 |
|
SU1321661A1 |
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| СПОСОБ ОГРАНИЧЕНИЯ ПЕРЕКОСА МОСТОВОГО КРАНА | 2012 |
|
RU2502665C1 |
| Устройство для управления электроприводами механизмов перемещения грузоподъемного средства | 1987 |
|
SU1421674A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Система управления пылесосом | 1991 |
|
SU1771684A1 |
| Электропривод кузнечного пресса | 1985 |
|
SU1295500A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ ОПОР КРАНА, содержащее асинхронные двигатели, обмотки роторов которых через выпрямители подключены к резисторам, связанным с регуляторами момента двигателей, одни управляклдие входы которых соединены с выходами за1дагчика момента двигателей, задатчик скорости, подключенный к одним входам блоков управления частотой вращения двигателей, задатчик перекоса опор и датчики пути опор, подсоединенные к входам схемы сравнения, выходы которой соединены с входами релейных элементов, одни выходы которых подключены к другим входам : блоков управления частотой вращения двигателей, отличающееся тем, что, с целью повышения производительности крана за счет ограничения перекоса его опор, оно снабжено блоками памяти, входы которых подключены к другим выходам релейных элементов, а выходы - к другим управляюишм входам регуляторов момента двигателей, причем управ-§ ляющие входы выпрямителей подключены к выходам блоков управления частотойf вращения двигателей. 4ib NJ 00
V
%;
29 J
УЛ. 2в
А/
иг.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для синхронного перемещения механизмов грузоподъемного средства | 1980 |
|
SU887425A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
