с:
Изобретение относится к подъемно- транспортному оборудованию, а именно KJ устройствам для управления электро- п;риводами механизмов перемещения гру- эопо дъемных средств, например кранов мостового типа для перемещения длинномерных грузов.
Цель изобретения - повышение надежности.
На чертеже приведена функциональная схема устройства.
Устройство содержит асинхронные Двигатели 1 и 2, обмотки статоров которых через ключи 3 и 4 управления соединены с источником 5 переменного Напряжения, а обмотки роторов замкнуты на нагрузочные резисторы 6 и 7 через тиристорные коммутаторы 8 и 9.
21674 , 2
включается блок 21, в результате двигатель 1 переходит в режим торможения. После достижения другим механизмом датчика 15 положения на входах элемента И 23 один из сигналов не ра- вен логической единице и блок 21 отключается, торможение двигателя 1 прекращается . Сигналы же на входах
jQ элемента И 29 равны логической единице и задатчики 10 и 11 переводят двигатели 1 и 2 в режим пониженной частоты вращения, для чего производится кратковременное и многократ15 ное размыкание обмоток роторов коммутаторами 8 и 9, Отключение двигателя 1 и 2 производится по команде датчиков 16 и 17 положения, при этом грузоподъемные средства останавлива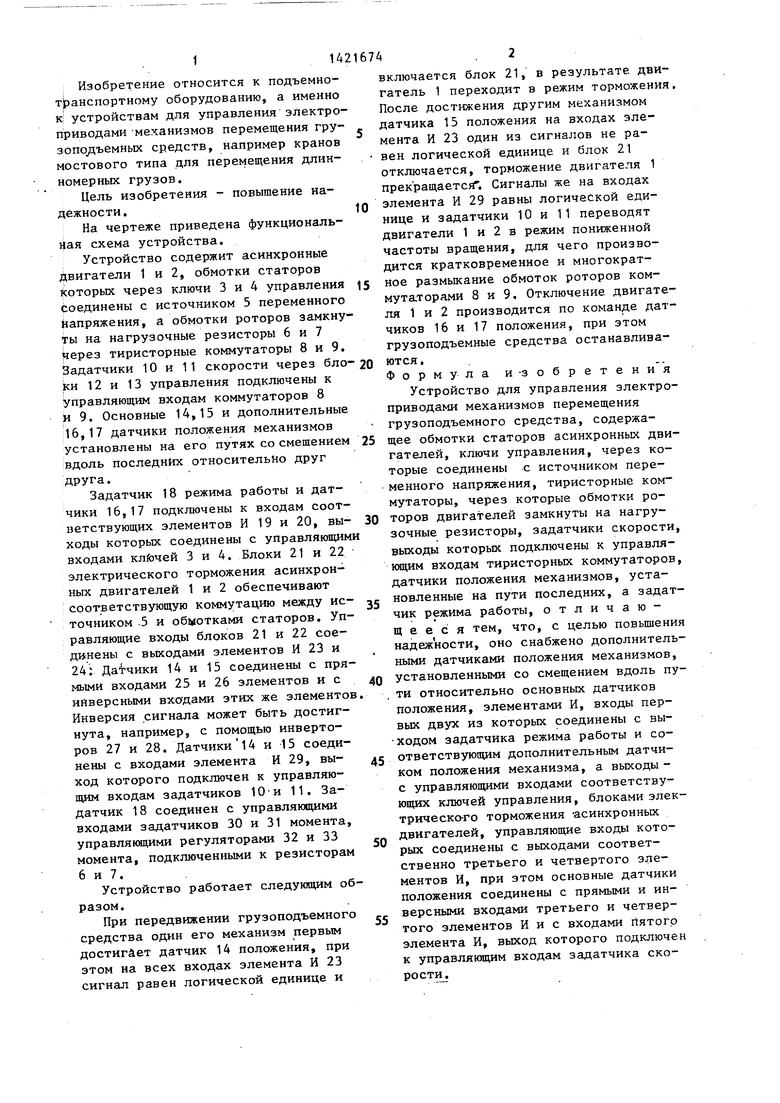
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1980 |
|
SU1053253A1 |
| Электропривод переменного тока | 1984 |
|
SU1259456A1 |
| Электропривод переменного тока | 1984 |
|
SU1246326A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Электропривод переменного тока | 1986 |
|
SU1431028A2 |
| Устройство для управления трехфазным асинхронным электродвигателем | 1983 |
|
SU1206940A1 |
| Электропривод механизма передвижения крана | 1983 |
|
SU1104631A1 |
| Электропривод для грузоподъемного механизма | 1979 |
|
SU860246A1 |
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1984 |
|
SU1279036A1 |
Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам для управления электроприводами механизмов перемещения грузоподъемных средств, например кранов мостового типа. Цель изобретения - повьшение надежности.Двигатели 1,2 связаны с блоками 21,22 электрического торможения и тиристор- ными коммутаторами 8,9. Датчики 14- 17 положения механизмов перемещения связаны с блоками 21, 22 и коммутаторами 8,9. По сигналу, например, датчика 14 блок 21 переводит двигатель 1 в тормозной режим. По сигналу датчика Т5 тормозной режим прекращ ается и коммутаторы 8,9 переводят двигатели 1,2 в режим пониженной частоты вращения. По команде датчиков 16,17 двигатели 1,2 отключаются. 1 ил. 
Задатчики 10 и 11 скорости через б л о-20 .
ки 12 и 13 управления подключены к управляющим входам коммутаторов 8 и 9, Основные 14,15 и дополнительные 16,17 датчики положения механизмов установлены на его путях со смещением вдоль последних относительно друг друга,
Задатчик 1В режима работы и датчики 16,17 подключены к входам соответствующих элементов И 19 и 20, выходы которых соединены с управляющим входами клйэчей 3 и 4, Блоки 21 и 22 электрического торможения асинхронных двигателей 1 и 2 обеспечивают соответствующую коммутацию между источником .5 и обмотками статоров. Управляющие входы блоков 21 и 22 соединены с выходами элементов И 23 и 24: Датчики 14 и 15 соединены с прямыми входами 25 и 26 элементов и с инверсными входами этих же элементов Инверсия сигнала может быть достигнута, например, с помощью инверторов 27 и 28, Датчики 14 и 15 соединены с входами элемента И 29, выход которого подключен к управляющим входам задатчиков 10-и 11, Задатчик 18 соединен с управляющими входами задатчиков 30 и 31 момента, управляющими регуляторами 32 и 33 момента, подключенными к резисторам 6 и 7,
Устройство работает следующим образом.
При передвижении грузоподъемного средства один его механизм первым достигает датчик 14 положения, при этом на всех входах элемента И 23 сигнал равен логической единице и
5
0
5
0
5
0
5
Формула и-3 обретения
Устройство для управления электроприводами механизмов перемещения грузоподъемного средства, содержащее обмотки статоров асинхронных двигателей, ключи управления, через которые соединены с источником переменного напряжения, тиристорные коммутаторы, через которые обмотки роторов двигателей замкнуты на нагрузочные резисторы, задатчики скорости, выходы которых подключены к управляющим входам тиристорных коммутаторов, датчики положения механизмов, установленные на пути последних, а задат- чик режима работы, отличающееся тем, что, с целью повышения надежности, оно снабжено дополнительными датчиками положения механизмов, установленными со смещением вдоль пути относительно основных датчиков положения, элементами И, входы первых двух из которых соединены с вы- ходом задатчика режима работы и соответствующим дополнительным датчиком положения механизма, а выходы - с управляющими входами соответствующих ключей управления, блоками элек- трическо-го торможения асинхронных двигателей, управляющие входы которых соединены с выходами соответственно третьего и четвертого элементов И, при этом основные датчики положения соединены с прямыми и инверсными входами третьего и четвертого элементов И и с входами Пятого элемента И, выход которого подключен к управляющим входам задатчика скорости.
| Устройство для управления приводом механизма передвижения опор крана | 1982 |
|
SU1047821A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
