2. Устройство по п. 1, о т личающееся тем, что блок формирования циклов содержит триггер управления, прямой выход которого . соединен с первыми входами первых П элементов И, инверсный выход с первыми входами вторых п элементов И, вторые входы которых ,соединены с выходом элемента задержки, третьи входы вторых п элементов И соединены с входом блоКа, выходы вторых п элементов И соединены с первыми входами п элементов ИЛИ, элемент НЕ, выход соединен с входом элемента задержки, а вход - с входом триггера управления, с первым входом второго элемента ИЛИ и с первым входом блока, разделительный конденсатор и последовательно соединенные первый счетчик импульсов, второй счётчик импульсов, расширител
сигнала, элемент памяти, формирювате сигнала, третий элемент ИЛИ и третий счетчик импульсов, соединенный выходами с вторыми входами первых п элементов И, третьи входы которых соединены с выходом элемента задержки, а выходы - с вторыми входами первых п элементов ИЛИ, соединенных выходами .с первыми выходами блока, второй вход третьего счетчикаимпульсов соединен с выходами расширителя сигнала и с вторым выходом блока, выход формирователя сигнала соединен с вторым входом второго элемента ИЛИ, выход которого соедине с третьим выходом блока, второй вход элемента памяти соединен с вторым входом блока, вход первого счетчика импульсов через разделительный конденсатор соединен с прямым выходом триггера -управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления подъемно-транспортным механизмом | 1984 |
|
SU1166063A2 |
| Устройство для ввода информации | 1982 |
|
SU1089566A1 |
| Устройство для программного управления | 1991 |
|
SU1800445A1 |
| МОДУЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1997 |
|
RU2112269C1 |
| Устройство для программного управления автоматическими линиями гальванопокрытий | 1983 |
|
SU1173393A1 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ | 1999 |
|
RU2146064C1 |
| Устройство для ввода информации | 1982 |
|
SU1062683A1 |
| Устройство для имитации неисправностей | 1988 |
|
SU1661766A1 |
| Адаптивное устройство для защиты памяти | 1983 |
|
SU1103291A1 |
| Устройство контролируемого пункта | 1983 |
|
SU1211784A1 |


1. УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ ПОДЪЕМНО-ТРАНСПОРТНЫМ МЕХАНИЗМОМ, содержащее шифратор и последовательно соединенные блок.управления вертикальным перемещением регистр адреса, блок сравнения, :блок управления горизонтальным перемещзнием, элемент ИЛИ и элемент задержки, вторые входы блока сравнения соединены с выходами шифратора, второй и третий выходы блока сравнения соединены соответственно с вторым и третьим входами блока управления горизонтальным перемещением, вторым выходом соединенного с вторым входом элемента ИЛИ, первый вход блока управления вертикальным перемещением соединен с первым выходом блока сравнения, отличающее с я тем, что, с целью повышения быстродействия отработки команд при изменении циклов, в него введены элемент запрета и блок формирования циклов, первый вход элемента запрета соединен с выходом элемента задержки, выход - с вторым входом блока управления вертикальным перемещением и с четвертым входом блока управления горизонтальным перемещением, первый вход блока формирования циклов соединен с выходом блока управления вертикальным перемещением, первые выходы - с вторыми входами регистра адреса, второй выход - с вторым входом элемента запрета, третий выход с третьим входом элемента ИЛИ, второй вход блока формирования циклов соединен с входом Пуск устройства.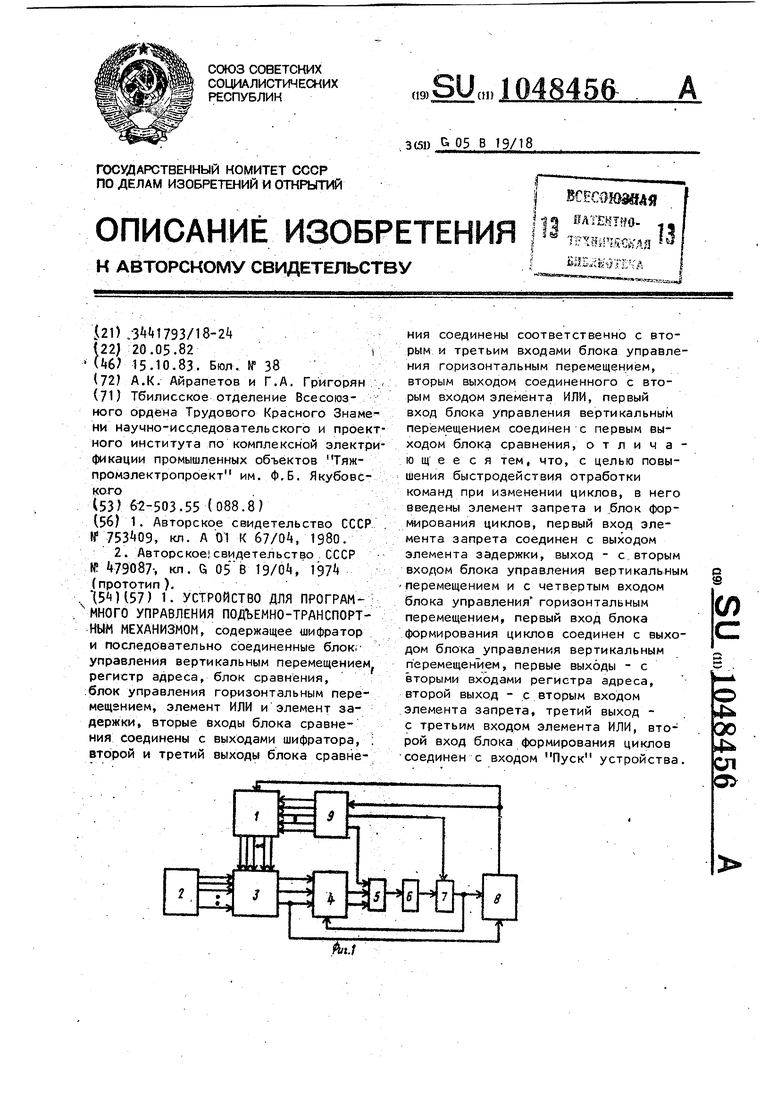
Изобретение относится к области автоматического управления подъемнотранспортными механизмами и может быть использовано в сельском хозяйctBe для программного управления перемещением механизма по гбризонтали и вертикали и получения точных конечных положений объекта управлени
Известна установка для выкормки гусениц шелкопряда, .состоящая из многоэтажной рамы с выкормочными . ящиками м кормораздаточным узлом, снабженная с обоих торцов вертикальными лифтами с толкателями ящиков, а стойки рамы соединены направляющими полозьям1г1 для.,, создания многоэтажности и перемещения по ним выкормочных ящиков Г 1 .
Наиболее близким по технической сущности к изобретению является устройство для управления подъемнотранспортным механизмом, содержащее регистр адреса и шифратор, выходы которых подключены к соответствующим входам блока сравнения, блсэк горизонтального перемещения, входы которого соединены с соответствующими выходами блока сравнения, блок вертикального перемещения, вход которого подключен к одному из выходов
блока сравнения, а выход - к входу регистра адреса, последовательно соединенные элемент ИЛИ и элемент . задержки, входы первого соединены с соответствующими выходами блока горизонтального перемещения, а выходчерез элемент задержки соединен с дополнительными входами блоков горизонтального и вертикального перемещений 2 .
Устройство обеспечивает точную отработку заданного перемещения по горизонтали и вертикали согласно команде, задаваемой извне оператором или отдельным задающим устройством, однако его невозможно использовать в установках, гда требуется частое изменение программ, (циклов) или необходимо обслуживание нескольких установок одноврменно.
Цель изобретения - повышение быстродействия отработки команд при изменении цикло.в.
Поставленная цель достигается тем, что в устройство для программного управления подъемно-транспортным механизмом, содержащее шифратор и последовательно соединенные блок управления вертикальным перемещением регистр /адреса, блок сравнения. блок управления горизонтальным перемещением, элемент ИЛИ и элемент задержки, вторые входы блока сравнения соединены с выходами шифратора второй и третий выходы блока сравнения соединены соответственно с вторым и третьим входами блока управления горизонтальным перемещением, вторым выходом соединенного с вторым входом элемента ИЛИ, первый вход блока управления вертикальным перемещением соединен с первым выходом блока сравнения, введены ; элемент запрета, блок формирования циклов, первый вход элемента запрет та соединен с выходом элемента задержки, выходом - со вторым входом блока управления вертикальным перемещением и с четвертым входом блока управления горизонтальным перемещением, первый вход блока фор миро- вания циклов соединен с выходом блока управления вертикальным перемещением, первые выходы - с вторыми входами, регистра адреса, второй выход - с вторым входом элемента запрета, третий выход - с третьим входом элемента ИЛИ, второй вход блока формирования циклов соединен с входом Пуск устройства. Блок формирования циклов содержит триггер управления, прямой выход которого соединен с первыми входами первых п элементов И, инверс ный выход - с первыми входами вторых п элементов И, вторые входы которых соединены с выходом элемента задержки, третьи входы вторых п элементов И соединены с входом блока, выходы вторых п. элементов И соединен с первыми входами п элементов ИЛИ, элемент НЕ выход соединен с входом элемента задержки, вход-с входом триггера управления, с пе{5вым входом второго элемента ИЛИ и с первым входом блока, разделительный конденсатор и последовательно соединенны е первый счетчик импульсов, второй счетчик импульсов, расширитель сигна элемент памяти, формирователь сигнала, третий элемент ИЛИ и третий счетчик импульсов, соединенный выходами с вторыми входами первых П элементов И, третьи входы которых соединены с выходом эле 1ента задержки, а выходы - с вторыми входами первых Ь элементов ИЛИ, соединенных выходами с первыми выходами блока, второй вход третьего счетчика импуль сов соединен с выходами расширителя сигнала и с вторым выходом блока, выход формирователя сигналов соединен с вторым входом второго элемента ИЛИ, выход которого соединен с третьим выходом блока, второй вход элемента памяти соединен с вторым входом блока, вход первого счетчика импульсов через разделительный конденсатор соединен с прямым выходом триггера управления. На фиг. 1 представлена блок-схема устройства; на фиг, 2 и 3 - схемы блоков управления горизонтальным и вертикальным перемещением} на фиг.Ч - схема блока формирования циклов. Устройство для программного управления подъемно-транспортным механизмом содержит регистр .адреса 1, шифратор 2, блок сравнения 3, блок управления горизонтальным перемещением i, элемент ИЛИ 5, элемент задержки 6, элемент запрета 7, блок управления вертикальным перемещением 8, блок формирования циклов 9-, Блок управления горизонтальным перемещением А содержит входные шины 10 и 11, на которые поступают сигналы сответственно больше и меньше, вырабатываемые блоком сравнения, элементы И 12 и 13, элементы памяти Tt и 15, выходные шины 16 и 17, выдающие на исполнительные механизмы соответственно сигналы Вперед и Назад на все время горизонтального перемещения. Выходы блока Ч шинами 1б и 17 соединены с первым и вторым входами элемента ИЛИ 5, на третий вход которого по шине 18 подается командный сигнал от блока 9Выход элемента ИЛИ 5 подсоединен к входу элемента задержки 6, а выход последнего через элемент запрета 7 по шине 19 заводится на второй вход, блока 8 и на вторые входы элементов И 12 и 13. Величина элемента задержки 6 обусловлена максимальным временем торможения и полнбго останова механизма на любом из датчиков. По шине.20 из блока сравнения 3 поступает сигнал Равно, который заводится на сбросовые входы элементов памяти 1 и 15. На второй сбросовый вход элемента памяти поступает по шине 11 сигнал Меньше. Блок 8 управления вертикальным перемещением содержит датчики 21, 5 22 нижнего и верхнего положений подъемного механизма соответственно элементы И 23, , первые входы которых подсоединены соответствен.но к датчикам 21, 22, вторые входы по шине 19 - к выходу элемента запрета 7, а третьи - к шине 20, по которой подается сигнал Равно из блока сравнения 3 элементы памя ти 25, 26, записывающие входы которых подсоединены соответственно к выходам элементов И 23, 2, а сбросовые входы к выходам датчиков 22, 2t соответственно; элемент ИЛИ 27, входы которого подсоединены к выходам элементов памяти 25 и 26, и элемент задержки 28. Величина элемента задержки 28 обусловлена максимальным временем торможения и полного останова подъемного механиз ма на датчиках 21, 22. Элементы памяти 25 и 26 по шинам 29 и 30 выдают на исполнительные механизмы сигналы соответственно Вверх и Вниз на все время вертикального перемещения. С выхода элемента задержки 28 сигнал по шине 31 поступа ет на первые входы регистра адреса 1 и блока формирований циклов 9. Блок формирования циклов 9 содер жит триггер управления 32, элемент НЕ 33 элемент задержки 3-t первый счетчик импульсов 35, третий элемен ИЛИ Зб, второй счетчик импульсов 37, расширитель сигналов 38, третий счетчик импульсов 39, элемент памяти 40, формирователь сигнала 41, второй элемент ИЛИ 42, вторые п элементов И 43, первые п элементов И 44, h элементов ИЛИ 45. Величина элемента задержки 34 обусловлена временем сброса регистра адреса Г. В исходном положении на прямом выходе триггера 32 будет код О, а на инверсном - 1, в счетчике 39 записан двоичный код нулевой позиции механизма, а в регистре адреса 1 - двоичный крд последней позици подъемный механизм находится в верх нем положении. Устройство работает следующим образом. На вход элемента памяти 40 подае ся пусковой сигнал, который после прохождения через формирователь 41 и элементы ИЛИ 36 и 42 записывает двоичный код первой позиции в счетчик 39 по шине 18 через элемен6ты ИЛИ 5 задержки 6, запрета 7 включает элемент .памяти 14, так как к этому времени блок сравнения 3 вырабатывает сигнал больше и по шине 10 подготавливает прохождение сигнала через элемент И.12. Сигнал Вперед по шине 1б поступает на, подъемно-транспортный механизм, который после этого начинает перемещаться. Как только механизм сдвинется с датчика горизонтального положения, на котором он находился, шифратор 2 положения механизма по горизонтали выдает на блок срав- нения 3 двоичный код нулевой позиции, так как ни один из датчиков горизонтального положения не возбужден. При этом блок сравнения 3 возбуждает шину 10, по которой подается сигнал Больше. Но возбуждение этой шины не изменяет состояния элементов И 12, 13, так как на их вторые входы уже поступает запрещающий потенциал от элемента задержки 6. При достижении подъемно-транспортным механизмом датчика заданной (последней )позиции блок сравнения 3 возбуждает шину 20 Равно, по которой происходит сброс элемента памяти 14, прекращая доступ сигнала Вперед на исполнительный механизм. При этом подъемно-транспортный механизм начинает тормозиться и останавливаться. После останова механизма сигнал сброса элемента памяти 14, пройдя элементы ИЛИ 5, задержки 6 и запрета 7, по шине 19 включает элемент памяти 26 через элемент И 24, так как на второй вход последнего поступает разрешающий сигнал с датчика верхнего положения 22, а на третий - из блока сравнения 3 сигнал Равно по шине 20. При этом на исполнительный механизм поступает по шине 30 сигнал Вниз. При достижении подъемным механизмом нижнего положения происходит сброс элемента памяти 26. Сигнал сброса этого элемента, пройдя через элементы ИЛИ 27 и задержки 28, по шине 31 поступает на первый вход регистра адреса 1 и в блок 9. где перебрасывает триггер управления 32 из одного устойчивого положения в другое, тем самым подготавливая цепь записи новой информации от счетчика 39, и через элементы НЕ 33, задержки 34, И, 44, ИЛИ 45 записывает по шинам 46 двоичный код первой позиции в регистр адреса 1 . Одновременно сигнал с выхода элемента ИЛИ по шине 18 поступает на элемент ИЛИ 5 и через элементы задержки 6 и запрета 7 включает элемент па,мяти 15 так как к этому времени блок сравнения 3 вырабатывает сигнал Меньше и по шине 11 подготавливает прохождение сигнала через элемент И 13. Сигнал Назад по шине 17 поступает на подъемно-транспор ный механизм, который начинает перемещаться . При достижении механизмом датчика первой позиции блок срав нения 3 возбуждает шину 20 Равно, по которой происходит сброс элемента памяти 15 -прекращая доступ сигнала Назад на исполнительный механизм. После останова механизма сигнал по шине 19 включает элемент памяти 25 через элемент И 23. При этом -на исполнительный механизм поступает. по шине 29 сигнал Вверх, При достижении подъемным механизмом верхнего положения происходит сброс элемента памяти 25 и начинается процесс торможения. После останова подъемног механизма на выходе элемента задержки 28 появляется сигнал, который по шине 31 сбрасывает регистр адреса j1, возвращает триггер управления 32 в исходное положение, при котором на инверсном выходе его будет код 1 а на прямом - О, и через элементы НЕ 33 задержки 3 И ИЛИ kS записывает по шинам 6 двоичный код последней позиции в регистр адреса 1. Одновременно сигнал с выхо да элемента ИЛИ 2 по шине ,18 дает команду на начало нового цикла перемещения подъемно-транспортного механизма. В момент переключения триггер 32 в исходное положение, что соответ ствует завершению одного цикла пере06 ВО входную цепь счет- икэ 35 мещений, посылается импульс. .Подъемно-транспортный механизм осуществляет п циклов перемещений с первой позиции до последней и обратно, после чего счетчик импульсов 35 выдает сигнал, который поступает на вход счетчика импульсов 37 и через элемент ИЛИ Зб записывает двоичный код второй позиции механизма в счетчик 39. После этого подъемно-транспортный механизм начинает перемещаться между второй и последней позициями, также осуществляя п циклов. Таким образом после каждых п циклов происходит переключение программы перемещений подъемно-транспортного механизма, который после каждого переключения будет останавливаться на последующей позиции вплоть до предпоследней. После осуществления m переключений счетчик импульсов 37 через расширитель сигнала 38 производит сброс счетчика 39- и элемента памяти АО, Одновременно сигнал по шине 47 поступает на второй вход элемента запрета 7, препятствуя прохождению командного сигнала с шины 31 через элементы ИЛИ 2 и 5 задержки 6, запрета 7 на шину 19. Таким образом, процесс перемещений подъемно-транспортного механизма завершается и устройство автом зтически устанавливается в исходное положение. Изобретение обеспечивает повышение быстродействия и надежности .работы устройства по сравнению с прототипом за счет отработки команд с заданной последовательностью при изменении циклов, а также повышение эффективности работы за счет уменьшения численности обслуживающего персонала.
