До настоящего времени автоматы для сборки шарикоподшипников не применялись.
Предметом изобретения является автомат для сборки шариковых подшипииков с усиковыми змеевидными сеиараторами, выпо/1н,яющий полный цикл сборки: от соединения отдельных деталей, до выдачи полностью собранного подишпника.
Особенностью описываемого автомата является то, что механизмы, осуш,ествляю1дие оиерации сборки, и транспортер, иеремеш.ающий детали с одной позиции на другую, расположены с одной стороны стола, а с другой стороны стола-магазины с полусенараторами и установочные вилки, удерживающие детали на рабочих позициях.
Отлично от иредыдущих конструкций решен вопрос угловой ориентации полусепаратора перед его выдачей с полющью кольцеобразного выступа, по которому полусепараторустанавливается
своими пазами требуемым образом.
Распреде чение шариков на равные по окружности расстояния выполняется клинообразными пальцами, двигающимися снизу в требуемой последовательности, а прижим шариков сверху осуществляется площадкой. Для отсекания полусепараторов по одной штуке из магазина, перед его выдачей на рабочую позицию, применены уг.товые рычагн и конирное устройство. Контроль комплектности поступаюнщх iHapiiков производится э.тсктроконтактным устройством.
Для надежного соединения иолусепараторов, последним во время сцепления дается относительный угловой поворот с помощью подпружпненпых сферообразных п.тунжеров.
Сборка производится на автомате на 10 позициях в следующем порядке:
1.Коитроль комплектности шариков, поступивших на автомат.
2.Засыпка шариков в соответС1вующу о пару колец.
3.Равиомерное распределение шариков по окружности между кольцами.
4.Ориентировка, отсечка, пере.иос и укладывание верхнего полусепаратора на распределенные по окружности шарики.
5.Контроль наличия верхнего полусепаратора.
С. Ориентировка i3e|x iicrc) iii.;.iyccГ1арато|)а в уг.лово.м иаирав/я ипи.
7.Ориентировка, отсечка, нерс1ЮС и укладьизание нижнего нсхлутепаратора.
8.Загибка уеиков нижнего полусепаратора (обжи.м).
9.Когггро.Из иа.тичия :;аг1 ть;х усиков li нижнего иолусспаратора,
10.Выдача собранного нодн1инника на нонсрсчнын ,н()н трансиортср.
(5орка нарнконодплн1ннкор. ос ществляется при Н1ослед()нательном псремеи,ении дета.чей с познп.ин н; познднк), .на которых устанои.тены мехаиизл Ы, р.ыпо.П1Я1они;е требуемые операции.
Траиснортирова пте дста.те/ нпои:;.. водится Tpai;cnop;e)OM, j-MOionuiM возвратио-поступате.тьное дии/кение в,ц0.11 ООН н иоворот Tt)aiiCH()p-THpyioninx BH;IOK li уг,.1 нанравлении. Ma рабочих позициях иодни-п ники фпксируютс;: устапо;к5Ч11ыми вилками.
Для верхнего и нижнего по.тусепараторов иредусмотрены магазшЫ. орие;ггиру:оии1е и выдаюнпс, гю.тусеиараторы по одно; нггуке.
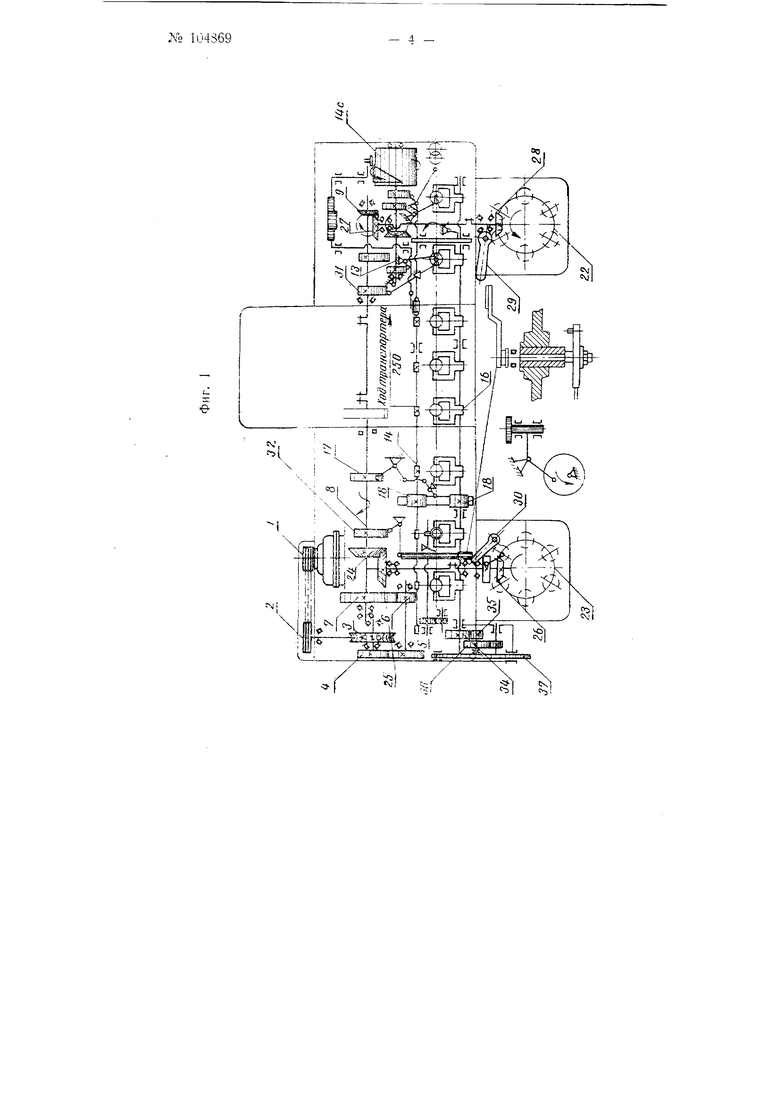
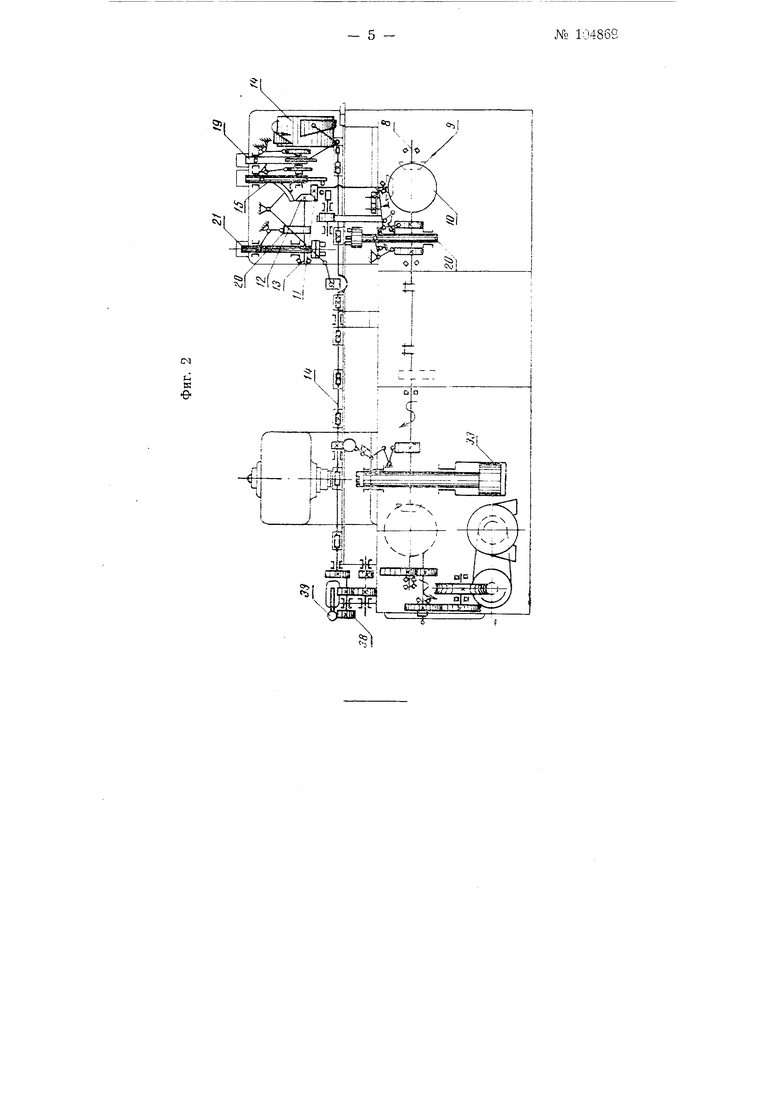
На фиг. 1 изображена кинематнческал cxe.тa авто.мата, вид, }, нлано; па (|)иг. 2-г,та;;иый внДц.
От электродвигателя д 5И {ение через шкивы 1, 2, червяч1 у10 пару 3, колеса 4, 5 и niecTcnHii 6, 7. передается нижнему распреде.ппсльному валу 8. Через конические шестерни Я 10, 11, 12, двнжеиие от ннж. распреде.т1ггслыюго вала 8, передается верхнему распределительиому валу 13. От установлепиых на распределительных ва.ta.x кулачков движение передается всем ме.ха измам автомата. Возвратпо-поступателвиое движение; продольного транспортера 14, осугцествляется от верхнего распределнтельного вала посредством ку.тачкового барабапа 14 рычажно-секторной передачи 15, уг:ювой поворот транспортируюц;их и установочных вилок 16 осуществляется от нижнего распределительного вала кулач.чом 17 через реечно-шестерепH}-i-r) передачу 18. Засыпка шариков в кольца производится с помонтькэ плу ;жера 19, управляемого кулачка .ми liepxitero распределиге;ь::;}го вала через рычажпую еиете.му.
Распределение нариков на ровпь е раестояния но окружЮсти HJ Oпзводится механ.нзмамн, veiaiiOBjieiiными на и верхней онравках 20 и 21, приводимых в движег.ие через рычажную систему от ку.тачков, уетановле1ниях на нижнем и нерхне.м распреде.ти-е niHbrx ва,. С-нача.та 5ерх1;ей ;); равкон 21 внутреш-гее ко,тьн,о ик-ппн-соноднншн.чка устанав,1И ;ается 1сонце1ггрично iap ;-KHOAiy ко. .ч.атем клнпоо6)азным секторол псе н;арики смендаются на о.чну ето)ону и о)иентнруются отноогге.тьно нижнс оасК|)едел11телы1ой onpaiSKH 20, в которой установ.ены ноднружиненные тнтифты (на чертеже не показаны). Носле.чние нмеюг |)аз.:н-гчн то длину и иослодовательпо раснределяют rH.apnivH па ра1зные |)асс1Ч)яния, ное,те на шарнк С1нускается верхHHii сенара.тор, ()нксиру он1ни пх по.чпжегпге.
Bpaiucrme магазинов 22 и 23 fsepxHeio и иилхпего полусепараторов оеун,ествляется от нижнего раепределнте.тьного вала посредством конических )нестерен 24, 25, 26 и 9, 27, 28.
Ориентировка о: сенараторов пе{эед выдаче из мага.зина производится кольдеобразпым выетупом с заборной частью по , который ориентирует ио.чусепаратор в yглoвo панравле нп1.
Перенос верхнего и нижнего полусепараторов на рабочие позиции производитея «руками 29, 30, управляемыми от ку.тачков 31, 32, установленных па иижне.м )асиределите,тьиом валу.
Загибка усиков ( сепаратора) производится с иомонп ю гидравлического цилиндра 33, управляемого дистапциоппой гидропапелыо (на чертеже не указана). Мехапизм для предварительпой сборки полусепараторов перед загибкой производит относительпый поворот полусепараторов с помощью сферообразпых подпружинеппых плунжеров (на чертеже пе указаны).
Выдача собрагпюго подшипника с продол1Л10го на нонеренный транспортер осун1,ествляется от вала, на
котором установлены установочные вилки J6 через шестернр 34, 35, 36, 37, 38 н штс)нгу 39.
Предмет изобретения
1.Автомат для cGojiKH naoHivO110ДШ1 т ;ков с усиковы и лмеевид 1ымк полусепаратор;и И, отл и ч а ю щ I и с я тем. что он вынол1 ен в вн.че стола, с одгои стороны которого расположены механизмы для производства опсрацни сборки контроля и транспортер , соверIH а юi цн и ,o:v, i а : , iо нательное дзилуенпе, обооудочанный транспортнруюшн -.ги зилкачн для iiei)eA;;4H ;1еталей с позицин на другую, с другой стороны- 1 гагг13 НЬг для верхнего и нижнего полуеенараторов н смонтировага1ыс на одноА валу уетановочные вилки для фиксирования деталей на столе относительно механпзлгов, совершаюи1,их очередную операцию.
2.Форма выполиекия автомата ПС и. 1,0 т л и чающая с я тем, 410 механиз-м для угловой ориентации нариков выполнен в виде клинообразного сектора и площадкн, подводи.мой сверху иа кольца и шарики, предохраия.ч их от перекоса.
3.Форма выполнения автомата по пп. 1 и 2, о т л и ч а ю д а я с я тем, что в механизмах для раеиределепия шариков на равные расстояния по окружности нрнменены подпружиненные штифты, установ.и.нные на разно;; 5ь:.ото : поочередно входяи1.не ме;-кд н:аоиками.
4. Форма выиолнс;;;:5- автомата ио ип. 1,2 и 3. о - л и ч а ю и;, а яся тем. что в л;ех:::-;:з :е д.тя уг.повой ориенгаци ::о;: -сепараторов перед выдачей гх ::.-; ;;:;-a3:;i:a ип очеред: у1о oпepaJЦ;: : i:i5;;Mei;ei кольцеобразный с ;-;:;иооиой частью ПС) высоте, xo:O o:;i :т;;нав:::за(:-т ол сепапато:1 ;; тре ол;ое для сбрркн Ho;io i er:v.
3. Форма Было.пмел. .i;:Ta ио ИИ. , 2, 3 ; 4, о т i i ч а ;о и: ;: яся TLJ;, 1ГГО Mexai i; i дтя отсо: аиия eenaj)aT(ipi из - зу азниа город выдачей иа раочую позпц:;:. выпол1с11 в видо уг.;сь:-т--; гъ1ча с; и коп::р;1огс устройства.
6.Фор: 1а выио-;;сп:1я ;;птомата ио пп. 1. 2. 3, 4 г: о. о : л ч ающаяея тем, что в механ: зл;с для коитроля хомплекг ;0от;; поступающих автома - шп пиков, наличия сепараторов и загсбки усиков при: епсны хонтро.тьные электрокоитактные устройства.
7.Форма выиолне1И1Я автомата ио пп. 1. 2, 3, 4, 5 и 6, о т л и . а ющ а я с я тем, что л;еха1ИК..м ;1,ля предварптель 1ого соедппсния верхцего и 1И1жиего полусепараторов, выполнен в виде взаимодействующих с верхним II нижпгм полусепараторами подиружи1-1е1 ИУ1Х сферообразиых плунжеров, ол.ии нз которых ил1еет углово псгзопот отиосительно другого.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для сборки внутреннего блока конического роликоподшипника | 1953 |
|
SU121712A1 |
| Многопозиционный гибочный автомат | 1979 |
|
SU869911A2 |
| Устройство для установки полусепараторов | 1974 |
|
SU510599A1 |
| Автомат для сборки шариковых подшипников | 1978 |
|
SU771373A1 |
| Автомат для сборки радиальных шариковых подшипников с углом заполнения шарами более 180° | 1956 |
|
SU120773A1 |
| Машина для крытья обложками штукованных заготовок переплетных крышек | 1960 |
|
SU135075A1 |
| Поточная линия для изготовления и упаковки, например, школьных тетрадей | 1959 |
|
SU131359A1 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ СИГАРЕТ В ПАЧКИ | 1969 |
|
SU242027A1 |
| Способ сборки радиальных шариковых подшипников с углом заполнения шарами более 180 @ и устройство для его осуществления | 1978 |
|
SU1135933A1 |
| Автомат для сборки радиаторов | 1967 |
|
SU306688A1 |