(54) МНОГОПОЗИЦИОННЫЙ ГИБОЧНЫЙ АВТОМАТ
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОПОЗИЦИОННЫЙ ГИБОЧНЫЙ АВТОМАТ | 1973 |
|
SU366906A1 |
| Устройство для клепки полусепараторов | 1979 |
|
SU971553A1 |
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| Устройство для клепки сепараторов шарикоподшипников | 1979 |
|
SU871992A1 |
| АВТОМАТ ДЛЯ СБОРКИ ИГОЛЬЧАТЫХ ПОДШИПНИКОВ | 1970 |
|
SU425003A1 |
| Способ сборки радиальных шариковых подшипников с углом заполнения шарами более 180 @ и устройство для его осуществления | 1978 |
|
SU1135933A1 |
| Автомат для изготовления пружинных колец | 1982 |
|
SU1063517A1 |
| Автомат для изготовления деталей из проволоки | 1987 |
|
SU1470404A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПРОВОЛОЧНЫХ ИЗДЕЛИЙ СЛОЖНОЙ КОНФИГУРАЦИИ | 1992 |
|
RU2050216C1 |
| Автомат для изготовления двух ветвевых пружин с отогнутыми концами | 1989 |
|
SU1657263A1 |
Изобретение относится к устройствам для гибки листового материала, преимущественно для гибки усиков сепараторов подшипников, и является усовершенствованием известного устройства, описанного в авх св. № 366906. В основном изобретении по авт. св. № 366906 описан многопозиционный гибочный автомат, преимуш,ественно для гибки усиков сепараторов подшипников качения, содержаш.ий непрерывно враш,аюш,ийся стол, на котором равномерно по окружности расположены матрицы для центрирования сепараторов, а также соосно установленные с матрицами подвижные пуансоны окончательной гибки. Автомат снабжен смонтированным на суппорте, установленном на поворотной планке, закрепленной в автомате, подпружиненным пуансоном предварительной гибки усиков, размещенным соосно с одним из пуансонов окончательной гибки между ними и матрицей, а также равномерно расположенными один относительно другого и на одинаковом расстоянии от матриц кулачками, закрепленными на боковой поверхности стола и ВХОДЯШ.ИМИ при врашении стола в защелку, закрепленную на суппорте пуансона предварительной гибки усиков. На станине смонтированы упор, воздействующий на защелку и ограничивающий поворот суппорта пуансона предварительной гибки усиков, и механизм возврата суппорта в исходное положение, а каждый из пуансонов окончательной гибки Закреплен на подвижном в осевом направлении суппорте, снабженном кулачком, перемещающимся по копиру, смонтированному на станине 1. На известном автомате невозможно производить загибку усиков стальных полусепараторов, т.е. невозможна сборка подшипников с вышеуказанными сепараторами, так как после отхода пуансона окончательной гибки соединение полусепараторов оказывается недостаточно сформированным, поскольку малы остаточные деформации. Целью изобретения является расширение номенклатуры обрабатываемых сепараторов подшипников путем повышения усилий окончательной гибки. Указанная цель достигается тем, что автомат по авт. св. № 366906 снабжен установленным на станине и кинематически связанным с вращающимся столом ударным механизмом, воздействующим на пуансон окончательной гибки.
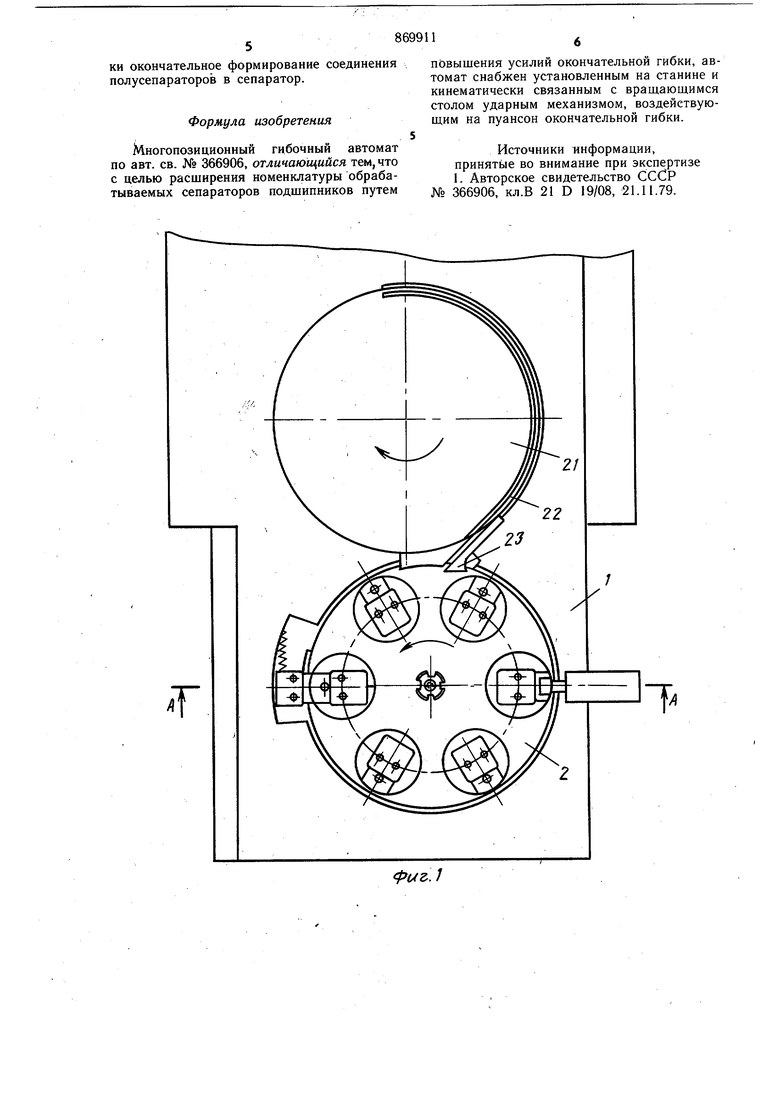
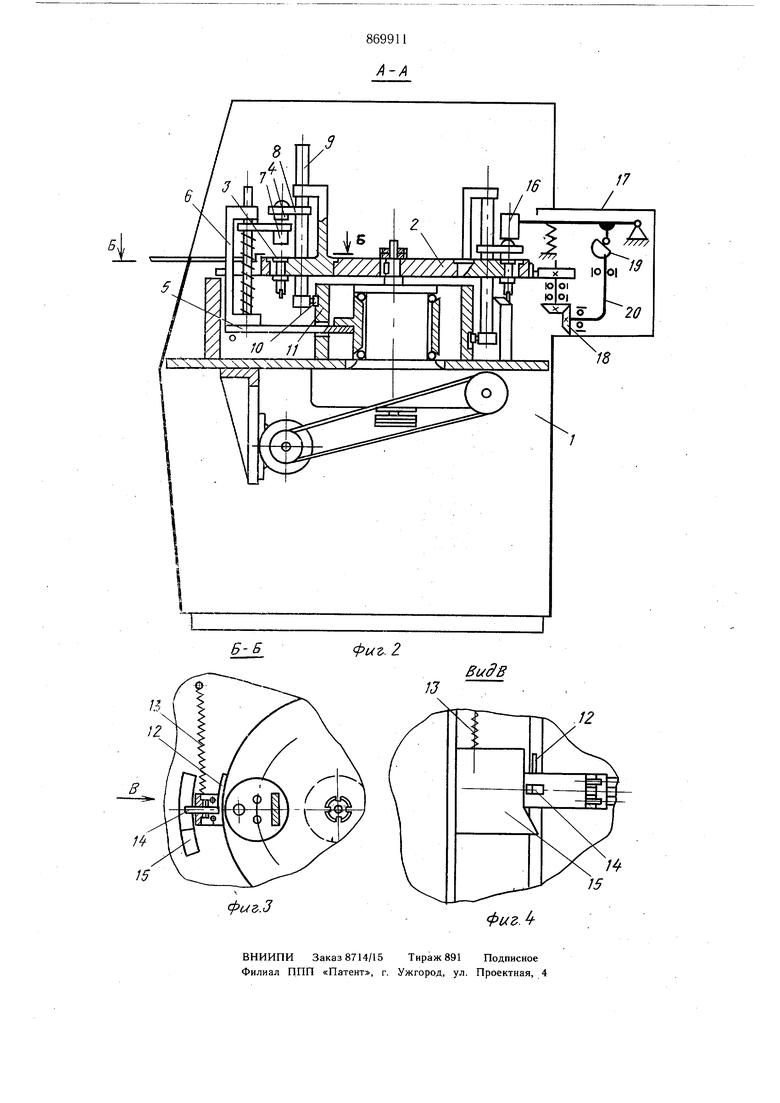
На фиг. 1 изображен общий вид описываемого автомата; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - вид по стрелке В на фиг. 3.
На станине 1 автомата смонтирован вращающийся рабочий стол 2, на котором укреплены на равном расстоянии друг от друга щесть блоков, состоящих из сорсно расположенных матриц 3 с гнездом для установки обрабатываемых сепараторов и пуансона 4 окончательной гибки.
Оси пуансона 4 и матрицы 3 неподвижны относительно друг друга.
На станине 1 также смонтирована планка 5, ось поворота которой совпадает с осью вращения рабочего стола 2.
На планке 5 укреплен суппорт 6,имеющий подпружиненный пуансон 7 предварительной гибки. Пуансон 7 в рабочем положении размещен сооснр с одним из пуансонов 4 окончательной гибки между последним и матрицей 3. Каждый из пуансонов 4 окончательной гибки закреплен на кронщтейне 8 одного из подвижных в осевом направлении суппортов 9, которые посредством копирных пальцев 10 связаны с копиром 11, смонтированным на станине 1. На боковой поверхности стола 2 расположены равномерно и на одинаковом расстоянии от матриц 3 кулачки 12 (см. фиг. 3).
Суппорт б снабжен механизмом возврата в исходное положение - пружиной 13 и подпружиненной защелкой 14, закрепленной на суппорте 6 и взаимодействующей с кулачками 12 и упором 15, неподвижно связанным со станиной 1 и ограничивающим поворот суппорта 6.
На станине 1 смонтирован ударный механизм, выполненный в виде бойка 16, закрепленного на подпружиненном рычаге, 17, кинематически посредством зубчатой передачи 18 и кулачка 19 связанный с вращающимся столом 2. Кулачок 19 установлен на одном валу 20 (вал изображен изогнутым условно) с одной из щестерен зубчатой передачи 18.
Автомат снабжен также загрузочным столом 21 с лотком 22 и неподвижной планкой 23.
Автомат работает следующим образом.
Подщипник с сепаратором с загрузочного стола 21 (фиг. 1) поступает по лотку 22 на рабочий стол 2 и попадает на матрицу 3. При помощи вибратора (не показан) подщипник укладывается на матрице 3 в положение, необходимое для проведения последующих операций. При дальнейщем движении рабочего стола 2 кулачок 12 входит в зацепление с защелкой 14 суппорта 6, который начинает перемещаться вместе с рабочим столом 2.
Пуансон 7 предварительной гибки располагается строго соосно блоку пуансон 4 - матрица 3.
Пуансон 7 предварительной гибки располагается строго соосно блоку пуансон 4 - матрица 3.
При этом суппорт 9 окончательной гибки с пуансоном 4, следуя профилю копира
11, опускается и приводит в движение пуансон 7 предварительной гибки, который производит предварительную подгибку усиков сепаратора.
При дальнейщем движении рабочего стола 2 пуансон 4 занимает верхнее положение, освобождая подпружиненный пуансон 7, который также выводится в верхнее положение Защелка 14 свободным концом наезжает на упор 15 включения и поворачивается вокруг своей оси, тем самым выходя из зацепления с кулачком 12.
Суппорт 6 под действием пружины 13 возвращается в исходное положение, прдготавливаясь для сцепления с очередным кулачком и установке соосно очередной паре пуансон 4- матрица 3. Подщипник с предварительно подогнутыми усиками сепаратора, продвигаясь дальше с рабочим столом 2, подвергается окончательной гибке усиков, сепаратора пуансоном 4, приводимым в дви.жение копиром 11. После этого подшипник
с пуансоном 4 окончательной гибки попадает в рабочую зону ударного механизма благодаря кинематической связи его с вращающимся столом 2. Боек 16 ударного механизма воздействует на пуансон 4, и происходит окончательное соединение сепаратора. Затем пуансон 4 окончательной гибки поднимается, подшипник выталкивается на уровень стола 2 толкателем (не показан), находящимся в блоке пуансон 4 - матрица 3, и неподвижная планка 23, установленная на станине 1 автомата, сдвигает готовый подщипник в выходной лоток (не показан).
В освободившуюся матрицу 3 на позиции загрузки укладывается новый подшипник.
Вращение рабочего стола 2 производится
безостановочно, а суппорт 6 сопровождает рабочий стол 2 в секторе, соответствующем операции предварительной гибки, а затем возвращается в исходное положение, устанавливаясь соосно следующей рабочей позиции.
При безостановочном вращении рабочего стола 2 производится также и окончательное формирование соединения двух полусепараторов в сепаратор под воздействием неподвижно установленного ударного механизма за счет скоротечности ударного воздействия на пуансон 4 окончательной гибки, не мешающего безостановочному вращению рабочего стола 2.
Предлагаемое изобретение позволяет расширить технологические возможности автомата, т.е. позволяет производить на автомате загибку усиков стальных полусепараторов путем введения ударного механизма, производящего через пуансон окончательной гибки окончательное формирование соединения полусепараторов в сепаратор.
Формула изобретения
Многопозиционный гибочный автомат по авт. св. № 366906, отличающийся тем, что с целью расширения номенклатуры обрабатываемых сепараторов подшипников путем
повышения усилий окончательной гибки, автомат снабжен установленным на станине и кинематически связанным с вращающимся столом ударным механизмом, воздействующим на пуансон окончательной гибки.
Источники информации, принятие во внимание при экспертизе 1. Авторское свидетельство СССР № 366906, кл.В 21 D 19/08, 21.11.79.
