Изобретение относится к электротехнике и может быть использовано в механизмах с высокими требованиями поддержания скорости при переменных моментах статических сопротивлений. Известен электропривод постоянного тока, предназначенный для работы в условиях переменного момента статического сопрЬтивления. В этом электроприводе опорная величина тока якоря электродвигателя получается путем сложения основного и дополнительного сигнала, получаемого в нелинейном блоке, включенного последовательно с линейным 1. Недостатком устройства является сложность, обусловленная наличием блоков для измерения момента статического сопротивления. Наиболее близким по технической сущности к изобретению является электропривод постоянного тока, содержащий эле стродвигатель с датчиками частоты вращения и тока якоря, последовательно включенные первый элемент сравнения, первый релейный элемент и усилитель мощности, выход которого подключен к электродвигателю, а выход датчика частоты вращения подключен к второму входу первого элемента сравнения. В этом устройстве с помощью релейного элемента осуществляется нелинейное преобразование сигналов управления 2. Недостатком электропривода является низкая точность поддержания скорости при наличии внещних неизмеряемых возмущении от переменного момента статических сопротивлений. Целью изобретения является повыщение точности регулирования скорости электропривода постоянного тока. Поставленная цель достигается тем, что в элейтропривод постоянного тока, содержащий электродвигатель с датчиками частоть вращения и тока якоря, последовательно включенные первый элемент сравнения, первый релейный элемент и усилитель мощности выход которого подключен к электродвигателю, а выход датчика частоты вращения подключен к второму входу первого элемента сравнения, дополнительно введены последовательно соединенные второй элемент сравнения, второй релейный элемент, фильтр, сумматор и интегратор, а также звено с пропорциональной характеристикой, причем его вход подключен к выходу сумматора, а выход - на первый вход второго элемента сравнения, на второй вход которого подключен выход интегратора, второй вход сумматора подключен к выходу датчика тока якоря, а выход - к третьему входу первого элемента сравнения, третий вход второго элемента сравнения подключен к выходу датчика частоты вращения. Если выбрать значение амплитуды полки второго релейного элемента максимальной величины, то в динамической йодсистеме, состоящей из второго элемента сравнения, второго релейного элемента, фильтра, сумматора, и интегратора, возникает скользящий режим. При этом соответствующим выбором величины коэффициента усиления Пзвена задается желаемая динамика переходных процессов в подсистеме, в частности процессов на выходе интегратора и выходе фильтра. Так как на интегратора восстанавливается сигнал равный сигналу на выходе датчика частоты вращения, то, следовательно, на выходе сумматора восстанавливается сигнал производной от скорости. Однако данная производная формируется в виде совокупности сигналов - токового от датчика тока и дополнительного с выхода фильтра. Токовый сигнал содержит динамическую и статическую составляющие. Динамическая составляющая тока пропорциональна идеальной производной от скорости двигателя. За счет выбора коэффициента П-звена задается такая динамика переходных процессов на выходе фильтра, что динамическая составляющая тока через сумматор поступает на соответствующий вход первого элемента сравнения без существующих искажений от сигнала с выхода фильтра, а статическая часть токового сигнала компенсируется сигналом с выхода фильтра. Таким образом, получение сигнала производной от скорости с использованием сигнала по току позволяет обеспечить ее малые динамйческие искажения, т.е. повысить ее точность. Наличие высококачественной производной на входе первого элемента сравнения позволяет использовать в прямом канале электропривода релейный элемент с высоким коэффициентом усиления на линейном участке без нарущения условий устойчивости в системе электропривода, т.е. без возникновения автоколебательных режимов по току. Использование релейного элемента, близкого к идеальному, позволяет обеспечить высокую статическую и динамическую точность процесса регулирования скорости в условиях переменной нагрузки по моменту статических сопротивлений. На чертеже представлена схема электропривода. Электропривод постоянного Тока содержит электродвигатель I с датчиками частоты вращения 2 и тока 3 якоря, последовательно включенные первый элемент 4 сравнения, первый релейный элемент 5 и усилитель 6 мощности, выход которого подключен к электродвигателю 1, выход датчика 2 частоты вращения подключен к второму входу первого элемента 4 сравнения, на первый вход которого поступает сигнал задания. В электропривод введены.последовательно соединенные второй элемент 7 сравнения, второй релейный элемент 8, фильтр 9, сумматор 10 и интегратор И, а также звено 12 с пропорциональной характеристикой, при чем его вход подключен к выходу сумматора 10, а выход - на первый вход второго элемента 7 сравнения, на второй вход которого подключен выход интегратора 11, второй вход сумматора подключен к выходу датчика 3 тока якоря, а выход - к третьему входу первого элемента 4 сравнения, третий вход второго элемента сравнения подключен к выходу датчика 2 частоты вращения. Электропривод постоянного тока работает следующим образом. При подаче на первый вход первого элемента 4 сравнения сигнала задания релейный элемент 5 занимает верхнее положение, равновесия. С его выхода сигнал поступает на вход усилителя 6 мощности. На электродвигатель 1 подается напряжение. В якорной цепи появляется ток. Сигнал по току снимается с датчика 3 тока и через сумматор 10 и третий вход первого элемента 4 сравнения поступает с отрицательным знаком на вход первого релейного элемента 5. Одновременно токовый сигнал с выхода сумматора 10 поступает через звено 12 и первый вход второго элемента 7 сравнения су отрицательным знаком на вход второго-релейного элемента 8. Второй релейный элемент 8 занимает нижнее положение равновесия. Сигнал с его выхода поступает на вход фильтра 9, Далее происходят следующие инерционные процессы. Электродвигатель 1 начинает вращаться. Информация о скорости с выхода датчика 2 частоты вращения поступает на третий вход второго элемента 7 сравнения. Одновременно на второй вход второго элемента 7 сравнения поступает сигнал с выхода интегратора П., Сигнал на входе второго релейного элемен-та 8 определяется соотнощением между сигналами по входам второго элемента 7 сравнения. Обозначим: ш - сигнал, пропорциональный частоте вращения двигателя 1; Ciw- сигнал на выходе интегратора - сигнал по току якоря двигателя 1; 1 - сигнал на выходе фильтра 9; г коэффициент звена 12. В момент появления тока в якорной цепи второй релейный элемент 8 занимает нижнее положение, так как соотношение сигналов на входах второго элемента 7 сравнения такое, что tJu + r(-i) За счет от1)ицательной обратной связи по сигналам i и (jb через некоторый малый про- межуток времени знак сигнала на выходе второго элеме нта 7 сравнения изменится и liw -r(i-i)-a 0 Второй релейный элемент 8 займет верх нее положение. За счет отрицательной обратной связи по i и через малый промежуток времени знак на выходе второго элемента 7 сравнения опять изменится и т.д. В динамической подсистеме, образованной вторым элементом 7 сравнения, вторым релейным элементом 8, фильтром 9, сумматором 10, интегратором 11 и звеном 12 с пропроциОнальной характеристикой, возникает скользящий режим, при котором справедливо равенство (Л} +r(f-t)- 01 0 Величина коэффициента г выбирается так, чтобы, с одной стороны, обеспечить высокую частоту скользящего режима, и, с другой стороны, чтобы было справедливо приблизительное равенство При этом сигнал с выхода сумматора 10 близок к производной от скорости. С выхода фильтра 9 через сумматор 10, первый элемент 4 сравнения, сигнал i-i поступает на вход первого релейного элемента 5. Одновременно на второй вход первого элемента 4 сравнения поступает сигнал с выхода датчика 2 частоты вращения. Первый релейный элемент 5 занимает верхнее положение до того момента, пока за счет отрицательной обратной связи по сигналам (i-i) и си сигнал на выходе первого элемента 4 сравнения не изменит знак. При этом первый релейный элемент 5 занимает нижнее положение равновесия. С его выхода сигнал поступает на вход усилителя 6 мощности. Напряжение на электродвигателе 1 меняет знак. Ток в якорной цепи начинает уменьшаться и, следовательно, через некоторое время изменяется знак сигнала с выхода первого элемента 4 сравнения и т.д. В основном контуре, образованном первым элементом 4 сравнения, первым релейным элементом 5, усилителем 6 мощности, электродвигателем 1. датчиком 3 тока якоря сумматором 10, существует скользящий режим. При этом справедливо равенство (Г-i) Так как сигнал с выхода сумматора 10 пропорционален производной от скорости, то последнее равенство есть дифференциальное уравнение, которое описывает движение электропривода постоянного тока. Решение его описывает процесс достижения электродвигателем заданной скорости, который является адаптивным, так как не зависит от параметров электродвигателя и усилителя мощнрсти. В установивщемся состоянии (1) Положим, что произошло увеличение момента статических сопротивлений на валу двигателя. При этом скорость электродвигателя 1 начинает уменьшаться. Баланс сигналов с выхода первого элемента 4 сравнения, изменяется таким образом, что первый релейный элемент 5 занимает верхнее установившееся положение. Аналогично меняется баланс сигналов на выходе второго элемента 7 сравнения, и второй релейный элемент 8 также принимает верхнее положение. В якорной цепи начинает быстро возрастать ток. Сигнал по току с датчика 3 тока через сумматор 10 и третий вход первого элемента 4 сравнения, поступает с отрицательным знаком на вход первого релейного элемента 5. Одновременно токовый сигнал с выхода сумматора 10 поступает через звено 12-с пропорциональной характеристикои и на первый вход второго элемента. 7 сравнения с отрицательным знаком на вход второго релейного элемента 8. Однако за счет малой величины коэффициента г второй релейный элемент 8 в начальный момент времени остается в верхнем положении. Сигнал с его выхода через фильтр 9 и сумматор 10 поступает на вход интегратора 11. В результате знак сигнала на выходе второго элемента 7 сравнения меняется, второй релейный элемент 8 занимает нижнее положение. Сигнал с его выхода через фильтр 9, сумматор 10, звено 12 с пропорциональной характеристикой поступает на первый вход второго элемента 7 сравнения. Происходит новое переключение второго релейного элемента 8 и т.д., т.е. в динамической подсистеме опять возникает скользящий режим, при котором сигнал с выхода сумматора 10 близок к производной от скорости. Параллельно в основном контуре также возникает скользяш,ий режим. Действительно, так как ток в якорной цепи возрастает, то скорость электродвигателя также начинает возрастать. Релейный элемент 5 занимает верхнее положение до момента, пока за счет отрицательных сигналов по (i-i) и сигнал на выходе первого элемента 4 .сравнения не изменит знак. При этом релейный элемент 5 займет нижнее положение равновесия. Сигнал с его выхода поступает на вход усилителя б мощности. Напряжение на электродвигателе 1 меняет знак. Ток начинает уменьшаться. При этом начинает увеличиваться сигнал с выхода первого элемента 4 сравнения. Релейный элемент 5 опять переключается и т. д. В основном контуре возникает скользящий режим, т.е. справедЛИБО равенство (1). Так как сигнал с выхода сумматора 10 по-прежнему пропорциот нален производной от скорости, то скорость электродвигателя восстанавливается к заданнои по траектории, которая есть .решение данного уравнения. Причем этот процесс не зависит от величины момента статических сопротивлений и параметров электропривода и поэтому отличается точностью и стабильностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом | 1982 |
|
SU1061105A1 |
| Устройство для управления электроприводом постоянного тока | 1977 |
|
SU748753A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока с упругой связью между электродвигателем и механизмом | 1988 |
|
SU1552324A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Электропривод постоянного тока | 1980 |
|
SU921014A1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Электропривод постоянного тока | 1984 |
|
SU1275724A1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель с датчиками частоты вращения и тока,якоря, последовательно включенные первый эле мент сравнения, первый релейный элемент и усилитель мощности, выход которого под ключен к электродвигателю, а выход датчика частоты вращения - к вторбму входу первого элемента сравнения, отличающийся тем, что, с целью повыщения точности регулирования скорости, в него дополнительно введены последовательно соединенные второй элемент сравнения, второй релейный элемент, фильтр, сумматор и интегратор, а также-звено с пропорциональной характеристикой, причем его вход подключен к выходу сумматора, а выход - на первый вход второго элемента сравнения, на второй вход которого подключен выход интегратора, второй вход сумматора подключен к выходу датчика тока якоря, а выход - к третьему входу первого элемента сравнения, третий вход второго элемента сравнения подключен к выходу датчика частоты вращения.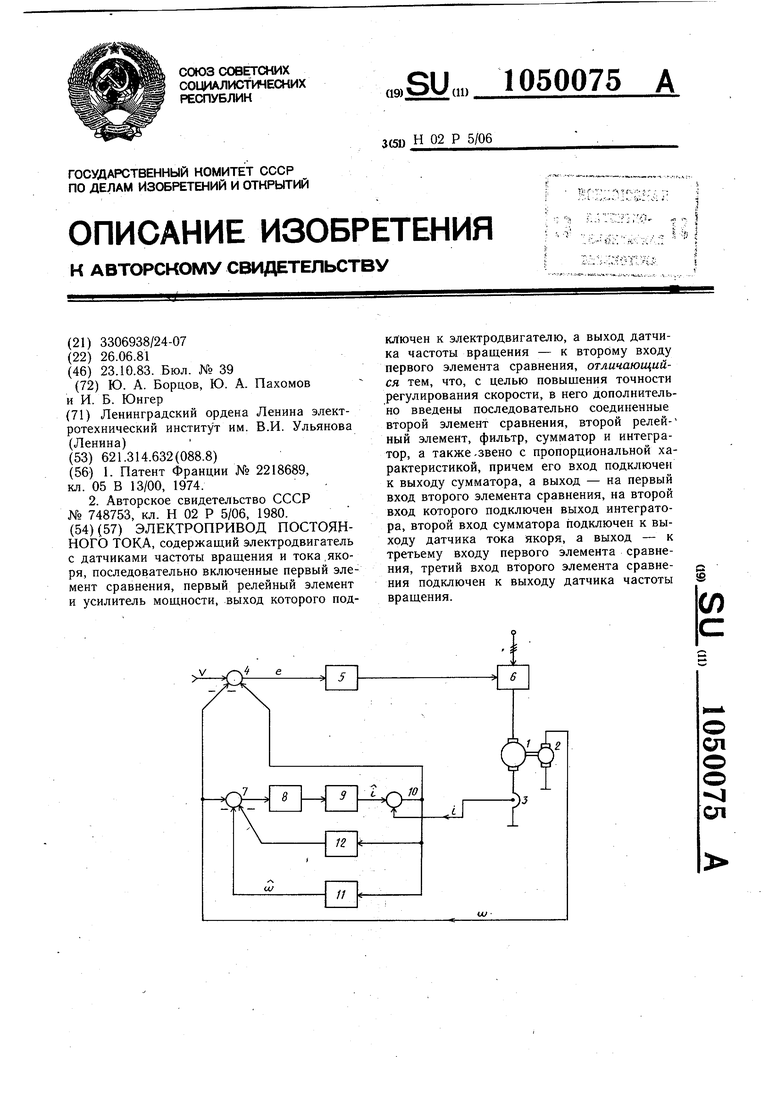
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПРЕДПОСЕВНОЙ ОБРАБОТКИ ПОЧВЫ СО СЛИТНОЙ ПОВЕРХНОСТЬЮ С ОДНОВРЕМЕННЫМ ПОСЕВОМ | 2002 |
|
RU2218689C2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления электроприводом постоянного тока | 1977 |
|
SU748753A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
