Изобретение относится к пищевой промьоиленности/ а именно к устройствам для загрузки решет с рыбой в клети для термической обработки. По основному авт. св. 984433 известно устройство для загрузки решет с рыбой в клети для термической обработки, содержа1,ее платформу с приводом для вертикального перемещения и укрепленными на ней элементами поярусного останова и механизма горизонтального перемещения решет, причем оно снабжено дополнительной платформой, выполнение которой аналогично основной, механизм горизонтального перемещения решет выполнен в виде ко11вейера, а платформы установлены у торцовых сторон последнего, при этом платформы имеют направляющие и фиксаторы для клетей, а над конвейером смонтирован дозатор для эагрузки решет рыбой. Кроме того, элементы поярусного останова платформы выполнены в виде бесконтактных датчиков и закрепленной на платформе гребенки с планками-якорями, установленными с шагом, равным шагу гнезд клетей, и с якорями сЛ:танова платформы в крайних верхнем и нижнем положениях и на уровне пола. При этом фиксаторы для клетей выполнены откидывакхцимися и имеют на внутренней поверхности направляющие для закатывания клети, переходящие в направляющие платформы(
Недостаток известного устройства заключается в том, что ему при работе требуется помещение большой высоты, а также то, что решета с рыбрй не точно попадают в гнезда клетей вследствие деформаций решет и клетей, возникакяцих при эксплуатации, что снижает надежность устройства.
Цель изобретения - повышение компактности и надежности устройства.
Эта цель достигается тем, что в устройстве для загрузки решет с рыбой в клети для термической обработки конвейер дополнительно снабжен направляющими с роликом, взаимодействующим со стойкой клети, при этом направляющие установлены на конвейере шарнирно и соединены между собой тягой, а конвейер смонтирован на площадке, оснащенной приводом для вертикального перемещения.
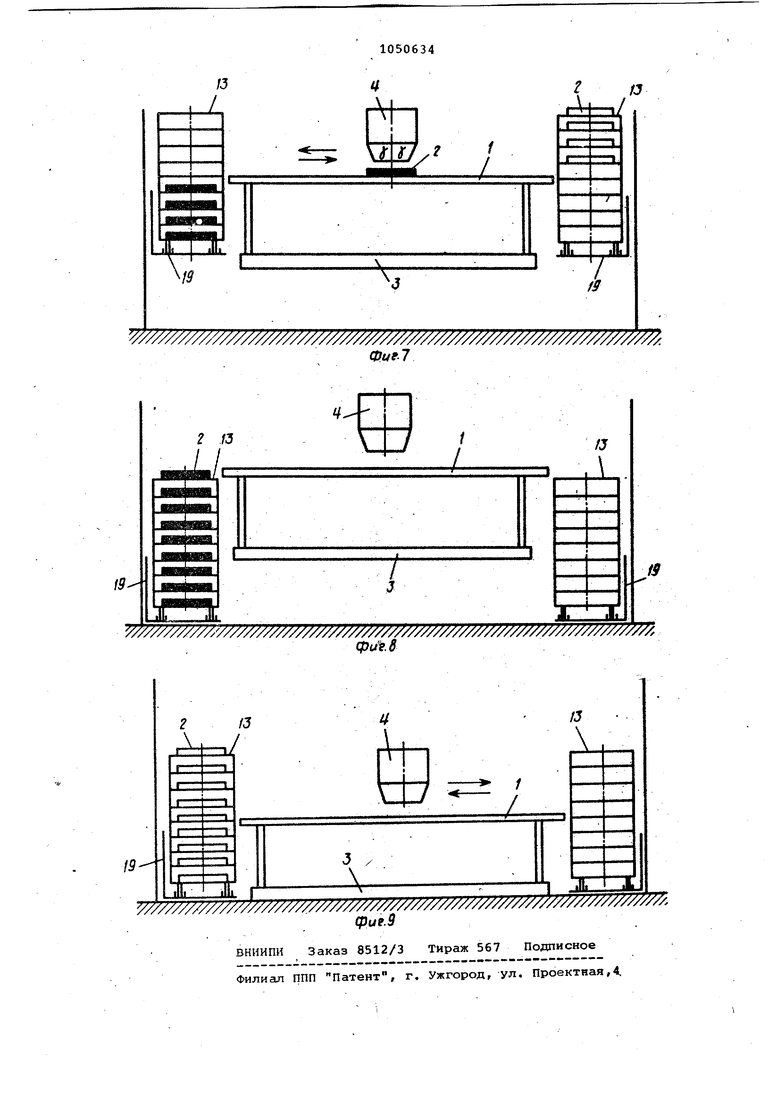
На фиг. 1 изображено предлагаемое устройство, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 вид А на фиг. 1; на фиг. 4 - механизм ориентирования решета, вид сбоку; на фиг. 5 - то же, вид на плане; на фиг. б - положение клетей и площадки с конвейером перед заполнением нижней половины клети решетами с рыбой; на фиг. 7 - то же, перед заполнением верхней половины клети решетами с продуктом; на фиг. 8 - то же, перед выкаткой загруженной клети; на фиг. 9 - то же, в исходном положении.
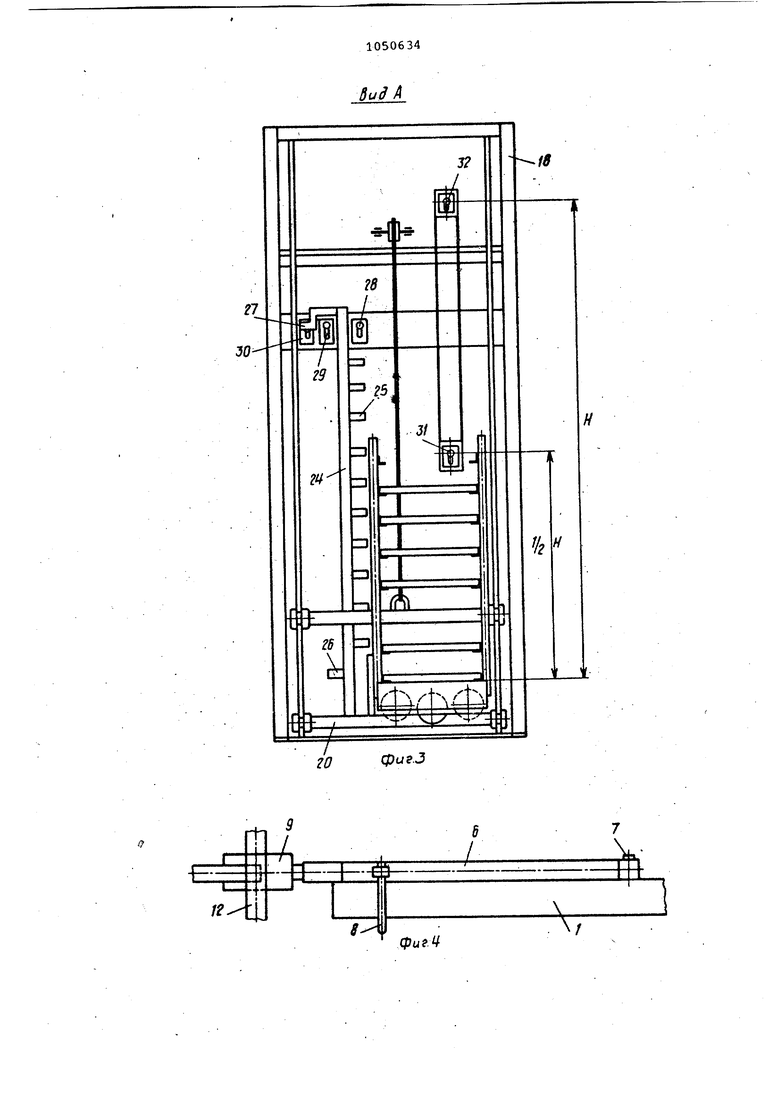
Устройство для загрузки решет с рыбой в клети для термической обработки содержит конвейер 1 загрузки решет 2 рыбой, установленный на подвижной в вертикальном направлени площадке 3. Дозатор 4 рыбы установлен над конвейером 1, а по торцам последнего - подъемниками. Со стороны каждого подъемника на конвейере 1 смонтирован механизм ориентирования решета,
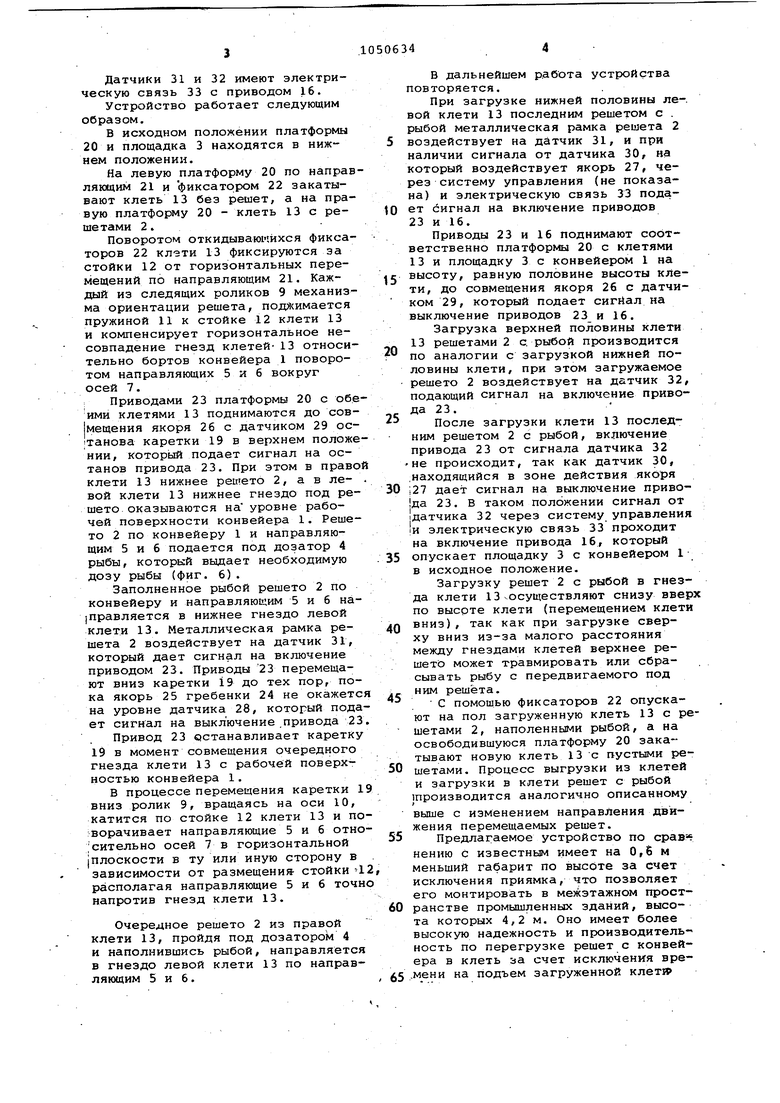
Механизм (на фиг. 4 и 5) состоит из направляющих 5 и б решета, установленных на осях 7 конвейера 1 и соединенных шарнир1 о между собой поперечной тягой 8. На конце направляющей 5 установлено следующее звено - ролик 9 на оси 10. Ролик поджимается пружиной 11 к стойке 12 клети 13.
Подвижная площадка 3 (фиг. 1 и 2 приводится в движение четырьмя винтами 14, установленными на колоннах 15. Винты 14 соединены с приводом 16 перемещения площадки 3 цецной передачей 17. Площадка 3 в нижнем положении установлена так, что рабочая поверхность конвейера 1 расположена от пола на расстоянии, равном половине высоты Н клети 13, а в верхнем положении - на расстоянии, равном высоте Н соответственно.
Каждый подъемник содержит раму 18 с подвижно установленной кареткой 19 платформы 20, на которой закреплены горизонтальные направляющие 21 и фиксаторы 22 клетей 13.
Каретка 19 имеет привод 23 вертикальных перемещений и гребенку 24 (фиг. 3) с планками-якорями 25, которые размещены с шагом, равным шагу размещения гнезд в клети 13 под решета 2. На гребенке 24 установлены якоря 26 и 27 остановка каретки в крайних верхнем и нижнем положениях соответственно. На раме 18 в зоне размещения якорей 26 и 27 установлены.элементы системы управления перемещением платформ: датчик 28 поярусного останова каретки, датчики 29 и 30 останова каретки в крайнем верхнем и нижнем положениях соответственно, а также пусковой датчик 31 спуска клети 13, установленный от пола на расстоянии равном половине высоты клети, и датчик 32 спуска клети, установленный от пола на расстоянии равном высоте клети
Датчики 31 и 32 имеют электрическую связь 33 с приводом 16.
Устройство работает следующим образом.
В исходном положении платформы 20 и площадка 3 находятся в нижнем положении.
На левую платформу 20 по направляющим 21 и фиксатором 22 закатывают клеть 13 без решет, а на правую платформу 20 - клеть 13 с решетами 2.
Поворотом откидывающихся фиксаторов 22 клзти 13 фиксируются за стойки 12 от горизонтальных перемещений по направляющим 21. Каждый из следящих роликов 9 механизма ориентации решета, поджимается пружиной 11 к стойке 12 клети 13 и компенсирует горизонтальное несовпадение гнезд клетей- 13 относительно бортов конвейера 1 поворотом направляющих 5 и б вокруг осей 7.
: Приводами 23 платформы 20 с обеими клетями 13 поднимаются до сов|мещения якоря 26 с датчиком 29 ос;танова каретки 19 в верхнем положении, который подает сигнал на останов привода 23. При этом в правой клети 13 нижнее решето 2, а в левой клети 13 нижнее гнездо под решето оказываются на уровне рабочей поверхности конвейера 1. Решето 2 по конвейеру 1 и направляющим 5 и 6 подается под дозатор 4 рыбы, который выдает необходимую дозу рыбы (фиг. 6).
Заполненное рыбой решето 2 по конвейеру и направляющим 5 и б на Правляется в нижнее гнездо левой клети 13. Металлическая рамка решета 2 воздействует на датчик 31, который дает сигнал на включение приводом 23. Приводы 23 перемещают вниз каретки 19 до тех пор, пока якорь 25 гребенки 24 не окажется на уровне датчика 28, который подает сигнал на выключение привода 23
Привод 23 останавливает каретку 19 в момент совмещения очередного гнезда клети 13 с рабочей поверхностью конвейера 1.
В процессе перемещения каретки 19 вниз ролик 9, вращаясь на оси 10, катится по стойке 12 клети 13 и поворачивает направляющие 5 и б отно|сительно осей 7 в горизонтальной |плоскости в ту или иную сторону в зависимости от размещения- стойки 12 располагая направляющие 5 и 6 точно напротив гнезд клети 13.
Очередное решето 2 из правой клети 13, пройдя под дозатором 4 и наполнившись рыбой, направляется в гнездо левой клети 13 по направляющим 5 и б.
В дальнейшем работа устройства повторяется.
При загрузке нижней половины ле-. вой клети 13 последним решетом с . рыбой металлическая рамка решета 2 воздействует на датчик 31, и при наличии сигнала от датчика 30, на который воздействует якорь 27, через систему управления (не показана) и электрическую связь 33 пода0 ет сигнал на включение приводов 23 и 16.
Приводы 23 и 16 поднимают соответственно платформы 20 с клетями 13 и площадку 3 с конвейером 1 на 5 высоту, равную половине высоты клети, до совмещения якоря 26 с датчиком 29, который подает сигйал на выключение приводов 23 и 16.
Загрузка верхней половины клети 13 решетами 2 с рыбой производится по аналогии с загрузкой нижней половины клети, при этом загружаемое решето 2 воздействует на датчик 32, подающий сигнал на включение привода 23.
После загрузки клети 13 последним решетом 2 с рыбой, включение
привода 23 от сигнала датчика 32
не происходит, так как датчик 30,
.находящийся в зоне действия якоря
0 |27 дает сигнал на выключение приво да 23. В таком положении сигнал от 1датчика 32 через систему управления |и электрическую связь 33 проходит на включение привода 16, который
5 опускает площадку 3 с конвейером 1 в исходное положение.
Загрузку решет 2 с рыбой в гнезда клети 13 осуществляют снизу вверх по высоте клети (перемещением клети
п вниз), так как при загрузке сверху вниз из-за малого расстояния между гнездами клетей верхнее решето может травмировать или сбрасывать рыбу с передвигаемого под ним решета.
С помощью фиксаторов 22 опускают на пол загруженную клеть 13 с ре шетами 2, наполенными рыбой, а на освободившуюся платформу 20 закатывают новую клеть 13 с пустыми ре0 шетами. Процесс выгрузки из клетей и загрузки в клети решет с рыбой {производится аналогично описанному
выше с изменением направления движения перемещаемых решет.
5 Предлагаемое устройство по срав нению с известным имеет на 0,6 м меньший габарит по высоте за счет исключения приямка, что позволяет его монтировать в межэтажном прост0 ранстве промышленных зданий, высота которых 4,2 м. Оно имеет более высокую надежность и производительность по перегрузке решет с конвейера в клеть за счет исключения вре5 .мени на подъем загруженной клет
1050634
из приямка до уровня пола .при ее вы- на устранение перекосов решета при катке с платформы, а также за счет его движении по конвейеру в гнезда сокращения времени, затрачиваемого клети.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки решет с рыбой в клети для термической обработки | 1981 |
|
SU984433A1 |
| Устройство для загрузки комплекта шомполов с рыбой в клети для термической обработки | 1982 |
|
SU1099934A1 |
| Устройство для загрузки и разгрузки стеллажей поддонами | 1981 |
|
SU958271A1 |
| Устройство для передачи клети с подвесного конвейера на рабочую позицию и обратно | 1984 |
|
SU1181961A1 |
| Устройство для загрузки и выгрузки решет с рыбой в клети для термической обработки | 1988 |
|
SU1542517A1 |
| Устройство для загрузки сеток с рыбой в клети для термической обработки | 1980 |
|
SU938889A1 |
| Клеть для размещения рыбы | 1982 |
|
SU1039473A1 |
| Технологическая линия для изготовления строительных изделий | 1986 |
|
SU1426801A1 |
| Вагон для пакетированных грузов | 1988 |
|
SU1684200A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНО-СКЛАДСКАЯ СИСТЕМА ДЛЯ КОЛЕСНЫХ ШИН | 1990 |
|
RU2013327C1 |
УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЕШЕТ С РЫБОЙ В КЛЕТИ ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ по авт. св. 984433, отличающееся тем, что, с целью ПОВ1 .аения компактности и на. чдежности устройства, конвейер дополнительно снабжен направляющими с роликом, взаимодействующим со стойкой клети, при этом направляющие установлены на конвейере шарнирно и соединены между собой тягой, а конвейер смонтирован на плоетадке, . оснащенной приводом для BepTHxaJibw ного перемещения. (Л СП о о со 4ib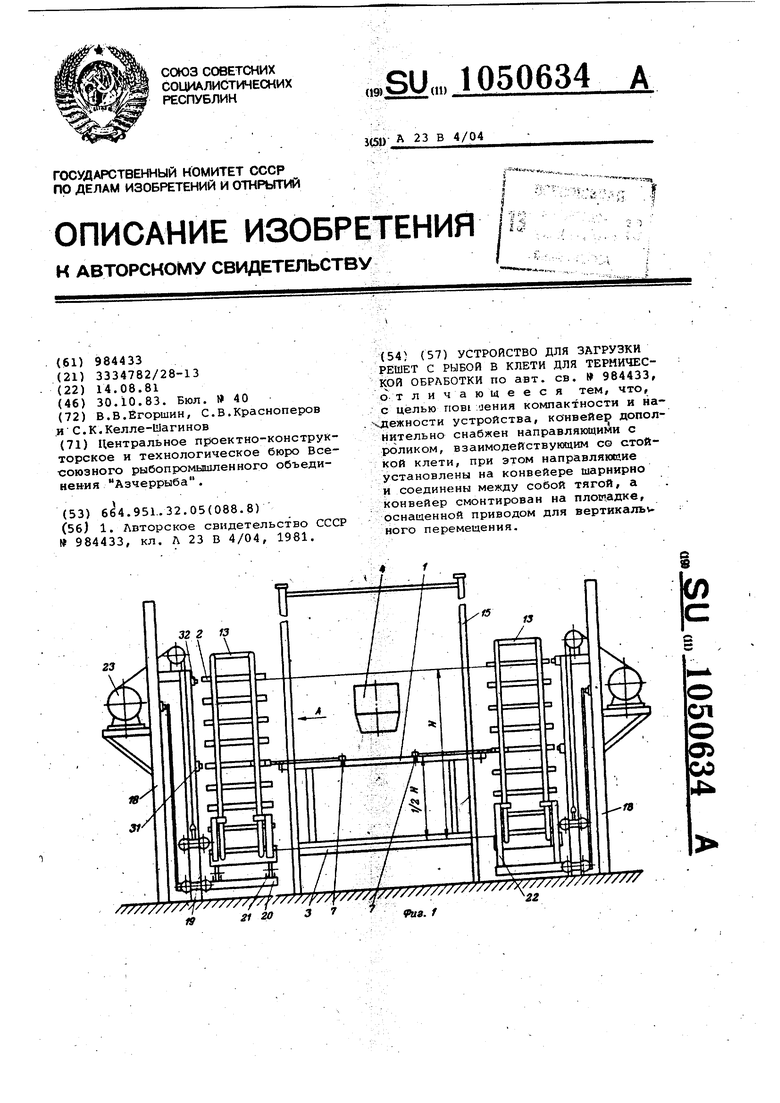
f7
5020
8u А
фиг.З
9 W .-
/J
y// ////////////////////////////////////////////////7
фие.6
/J фий5
/J
Ж-.Л
3 Т
19 W//////////////////// Фиг
2 13
19
/J
I
19
////////Т У/////////////////////////////////////
фи1е.8
