(54) УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЕШЕТ С РЫБОЙ В КЛЕТИ ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ
1
изобретение относится к рыбной промышленности, в частнасти к технологическому оборудованию по производству вяленой и копченой рыбы.
Известно устройство для загрузки пиш,евых продуктов в клети при термической обработке, содержаш,ее накопитель с горизонтальными направляющими, установленный с возможностью перемеш,ения по вертикали, и два толкателя 1.
Однако в известном устройстве накопитель имеет сложную и громоздкую конструкцию и является стационарным.
Известно также устройство для загрузки решет с рыбой в клети для термической об-, работки, содержащее платформу с приводом для ее вертикального перемещения и с укрепленными на ней элементами поярусного останова и механизм горизонтального перемещения рещет, выполненный в виде толкателя. В загруженном состоянии платформа представляет собой многоярусный держатель рещет, положение которых должно.с некоторым допуском совпадать с гнездами клети, куда они одновременно перегружаются толкателем 2.
Недостатки указанной конструкции заключаются Б том, что многоярусный держатель рещет зафиксирован неподвижно относительно самой клети, а клети имеют погрешности изготовлениия и отличаются одна от другой по геометрическим размерам. Более того, в процессе эксплуатации нежесткая рамная конструкция клетей деформируется и они имеют значительный перекос по высоте. Это приводит к тому, что место размещения решет в клетях не совпадает с местом их размещения в многоярусном держателе и при одновременной перегрузке всех решет в клеть большая их часть не попадает в гнезда из-за несовпадения их по высоте или в поперечном направлении и под действием толкателя пневмопривода решета перекашиваются, деформируются. Работа обслуживающего персонала осуществляется в сложньа условиях из-за необходимости в короткое время направить больщую часть решет в гнезда клети.
Устройство имеет низкую производительность из-за наличия дополнительных one-раций; накопление решет с рыбой в многоярусном держателе по числу гнезд в клети;
перегрузки решет с рыбой из гнезд держателя в гнезда клети.
Перегрузка решет с элеватора непосредственно в клеть также невозможна из-за пространственного несоответствия положений каждого из гнезд клети положению многоярусного держателя.
Цель изобретения - повышение производительности путем обеспечения выгрузки пустых решет из клетей и сокрашения межоперационного времени, а также повышение надежности перегрузки решет.
Поставленная цель достигается тем, что устройство для загрузки решет с рыбой в клети для термической обработки, содержашее платформу с приводом для ее вертикального перемешения и с укрепленными на ней элементами поярусного останова и механизм горизонтального перемешения решет, снабжено дополнительной платформой, выполнение которой аналогично основной, механизм горизонтального перемещения решет выполнен в виде конвейера, а платформы установлены у торцовых сторон последнего с возможностью перемешения из во взаимно противоположных направлениях, при этом платформы имеют направляющие и фиксаторы для клетей, а над конвейером смонтирован дозатор для загрузки решет рыбой.
Элементы поярусного останова платформы выполнены в виде бесконтактных датчиков и закрепленной на платформе гребенки с планками-якорями, установленными с шагом, равным шагу гнезд клетей, и с якорями останова платформы в крайних верхнем, нижнем положениях и на уровне пола.
Фиксаторы для клетей выполнены откидываюшимися и имеют на внутренней поверхности направляюшие для закатывания клети, переходяшие в направляюшие платформы.
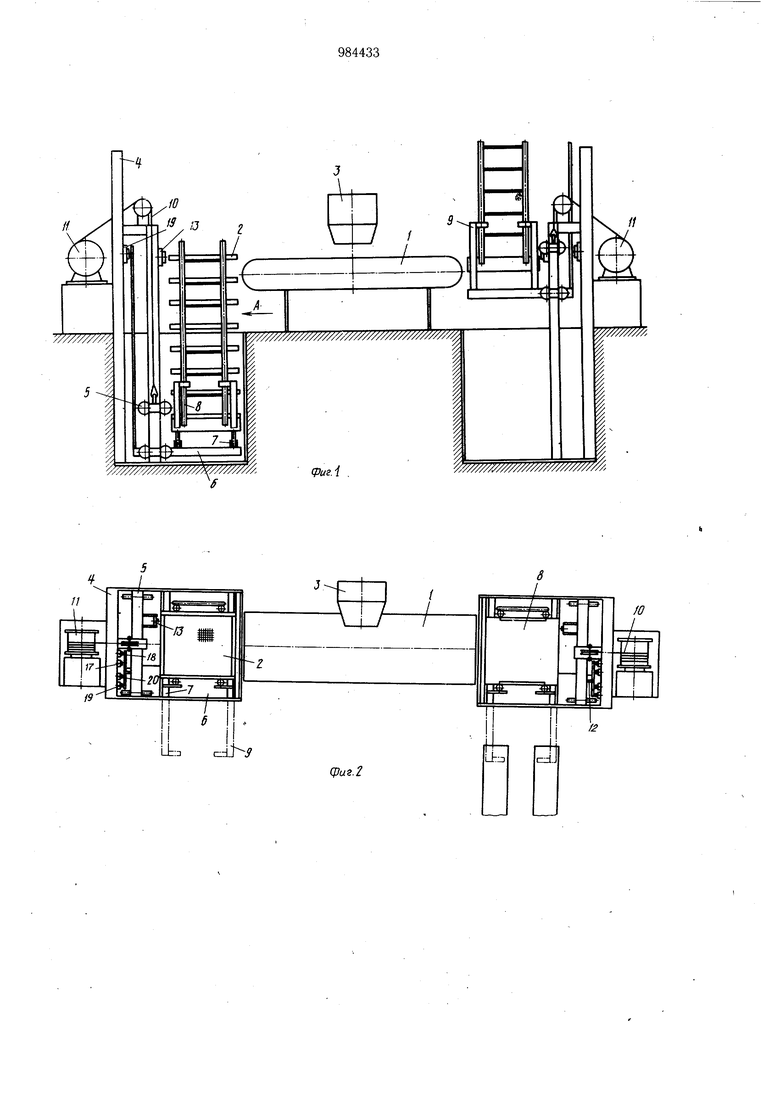
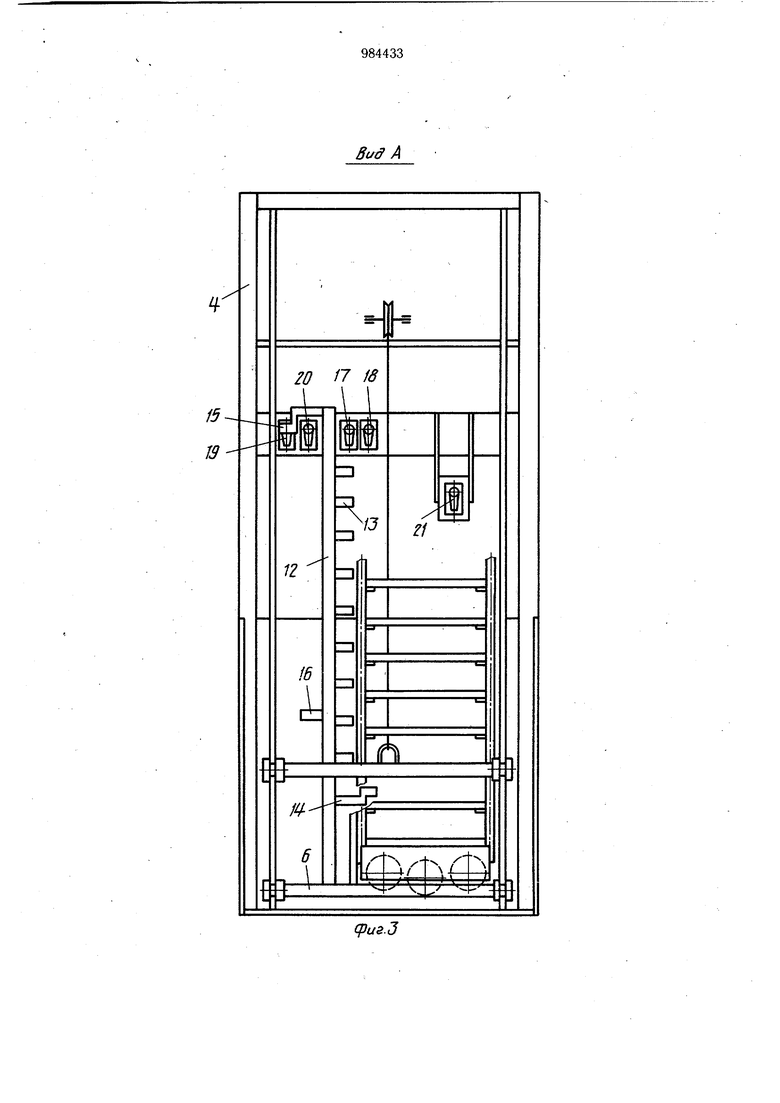
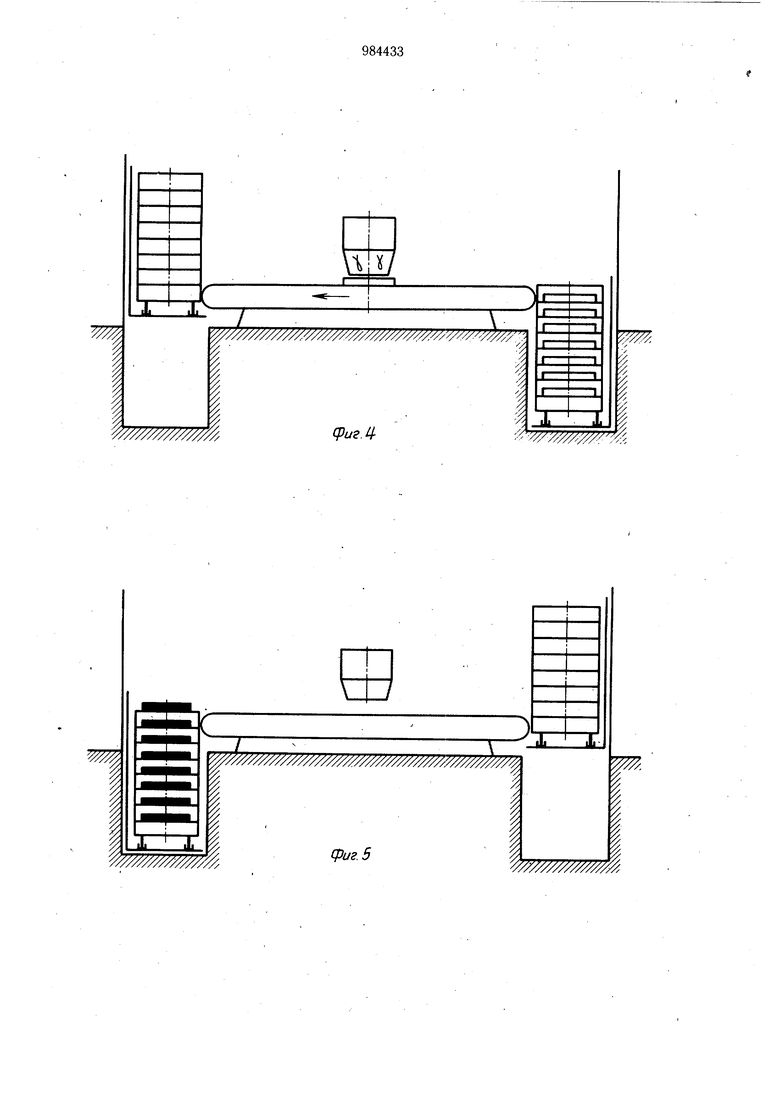
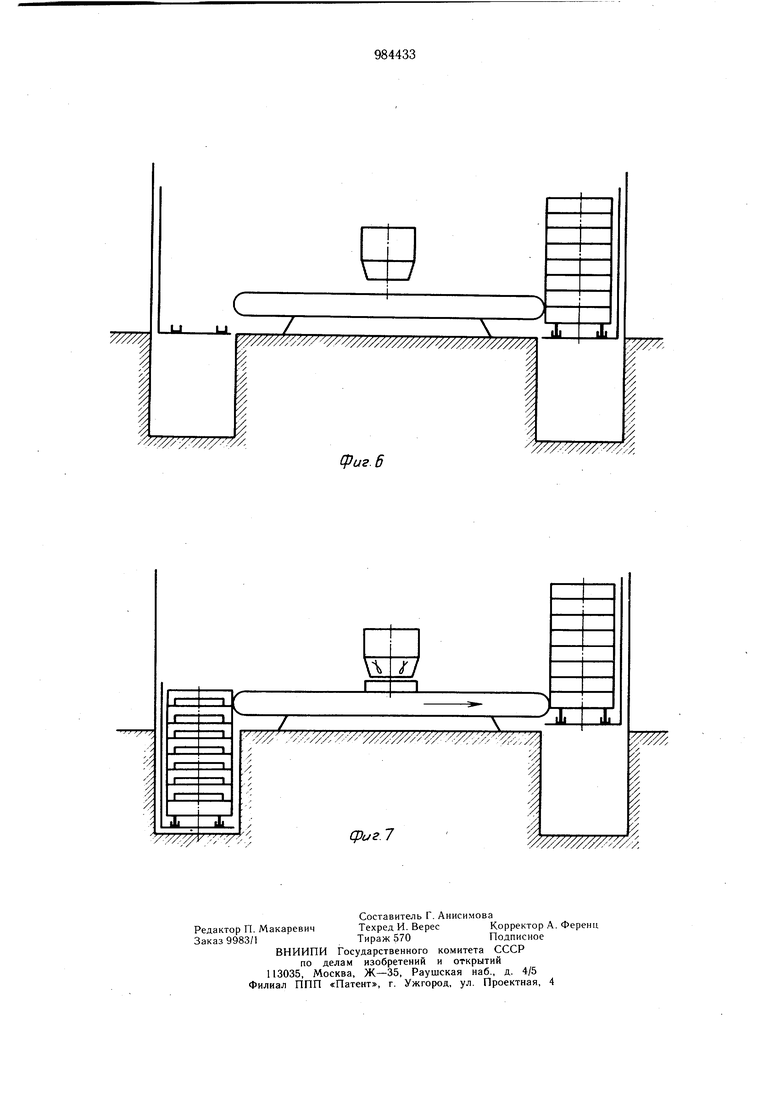
На фиг. 1 изображено устройство для загрузки решет с рыбой в клети, общий вид; на фиг. 2- то же, вид в плане; на фиг. 3 - вид по стрелке А на фиг. 1; на фиг. 4-7 - технологические схемы устройства: исходное положение клетей перед заполнением решет продуктом, положение клетей после загрузки одной из них решетами с продуктом, положение платформ в момент выкатки загруженной клети, положение клетей перед заполнением решет и их загрузкой в ранее освобожденную клеть.
Устройство содержит конвейер 1 для перемешения решет 2, над которым расположен дозатор 3 рыбы, и два подъемника, расположенные оппозитно по торцам конвейера 1. Подъемник состоит из рамы 4 с подвижно установленной кареткой 5, на которой закреплена платформа 6 с горизонтальными направляюшими 7 для закатывания клетей 8 и их фиксаторами 9. Каждая из кареток 5 посредством тросов 10 соединена с приводами И их вертикальных перемещений. Приводы И перемещения кареток 5 электрически соединены между собой си-стемой управления перемещением кареток с платформами во взаимно противоположных направлениях (не показана).
На платформе 6 закреплена гребенка 12 с планками-якорями 13, которые размещены по высоте с шагом, равным шагу размещения гнезд под решета 2 в клети 8. На гребенке 12 также установлены якорь 14 останова платформы в верхнем положении,
якорь 15 останова платформы в нижнем положении и якорь 16 останова платформы на уровне пола, а на раме 4 в зоне размешения якорей установлены датчик 17 поярусного останова платформы, датчик 18 останова платформы в верхнем положении,
датчик 19 останова платформы в нижнем положении, датчик 20 останова платформы на уровне пола и датчик 21 спуска-подъема платформы с клет1зЮ.
Каждое решето, например стальное,
является якорем, воздействующим на датчик 21.
Направляюшие 7 платформы для закатывания клетей 8 состоят из горизонтальных ручьев с шарнирно откидываюшимися участками, каждый из которых является фиксатором 9 клети и имеет на внутренней поверхности направляюшие, совпадаюшие с направляющими платформы для закатывания клети. Конец откидывающегося участка-фиксатора имеет упор в подъездные цеход вые пути.
Устройство работает следующим образом.
В исходном положении платформы 6 установлены на уровне пола. На одну из платформ 6 по направляющим откидывающегося
5 фиксатора 9 и горизо 1тальным направляющим 7 платформы закатывают клеть 8 с пустыми рещетами 2, а на другую - клеть 8 без решет. Поворотом откидывающегося фиксатора 9 клеть 8 фиксируют за ее стойки от горизонтальных перемешений по платфор ме 6 относительно конвейера 1.
Клеть 8 с пустыми решетами 2 перемешают вниз до совмешения якоря 14 с датчиком 18, а клеть без решет - вверх до совмешения якоря 15 с датчиком 19, которые подают сигнал в систему управления перемещением кареток на останов приводов 11. При этом в клети 8 с решетами верхнее решето 2, а в клети без решет нижнее гнездо под решето оказываются на уровне рабочей поверхности конвейера 1. Рещето 2 из клети 8 по конвейеру 1 подается под дозатор 3 рыбы, который выдает на него необходимую массу рыбы. Заполненное рыбой рещето 2 направляется в нижне-е гнездо пустой клети 8 и воздействует на датчик 21, который через систему управления подает сигнал на включение приводов 11 вертикального перемещения кареток 5. Включаются приводы 11, клеть 8 с peшefoм 2, заполненным рыбой, опускается вниз, а противоположная клеть
поднимается вверх до тех пор, пока планка-якорь 13 гребенки 12 не откажется на уровне датчика 17, выключающего приводы. 11 перемещения платфорлг 6.
Очередное рещето 2 из клети 8, пройдя под дозатором 3 и наполнивщись рыбой, направляется в гнездо клети 8, которое за счет люфтов в -приводе и некоторой инерционности системы управления останавливается по высоте, несколько ниже рабочей поверхности конвейера 1, чем обеспечивается надежный заход рещета с рыбой в гнездо клети по высоте за счет исключения влияния погрещностей изготовления клетей и самих решет.
Рыба, неровно насыпанная на решета, не сбрасывается и не травмируется, так как все вышележащие гнезда клети еще не заполнены.
Работа повторяется .аналогично работе с первым рещетом. После загрузки клети-8 последним рещетом 2с рыбой включают приводы 11 перемещения платформ 6 и полностью загруженная решетами с рыбой клеть 8 поднимается вверх, а пустая клеть опускается вниз до совмещения якоря 16 с датчиком 20, -подающего сигнал на выключение привода II в момент нахождения платформы б на уровне пола. Опускают откидывающиеся участки горизонтальных направляющих и клеть, загруженную решетами с рыбой, выкатывают на следующую технологическую операцик), а вместо нее на платформу б закатывают клеть с пустыми решетами.
Процесс загрузки решет с рыбой в освободившуюся клеть повторяется в противоположном направлении аналогично описанному выше.
Предлагаемое устройство позволяет весь технологический процесс на операциях выгрузки готового продукта, санобработки и загрузки решет в Клети осуществлять без удаления решет из клетей, тем самым исключить возможность появления поломок и деформации решет, а также сократить время на их многократную загрузку-выгрузку и площади для их складирования.
Увеличение производительности устройства осуществляется за счет: сокращения межоперационного времени, получаемого в. результате выгрузки решет из одной клети, их наполнения и загрузки заполненных решет в другую клеть, осуществляемые на одном уровне, тем самым исключается ручной
трул или промежуточные механизмь для их спуска-подъема; использования без выкатки опустевшей клети для загрузки в нее решет, наполненных рыбой, при следующем цикле загрузки рыбой решет; обслуживания устройства в менее сложных условиях, так как рабочий успевает направить одиночное рещето с рыбой в гнездо клети, имеющей отклонения геометрических размеров.
10
Формула изобретения
1.Устройство для загрузки рещет с рыбой в клети для термической обработки, содержащее платформу с приводом для ее вертикального перемещения и с укрепленными на ней элементами поярусного останова и механизм горизонтального перемещения рещет, отличающееся тем, что, с целью повышения производительности путем обеспечения выгрузки пустых решет из клетей и сокращения межоперационного времени, а также повышения надежности перегрузки решет, оно снабжено дополнительной. платформой, выполнение которой аналогично основной, механизм горизонтального перемещения
, решет выполнен в виде конвейера, а платформы установлены у торцовых сторон последнего с возможностью перемещения их во взаимно противоположных направлениях, при этом платформы имеют направляющие и фиксаторы для клетей, а над конвейером
0 смонтирован дозатор для загрузки решет рыбой.
2.Устройство по п. 1, отличающееся тем, что элементы поярусного останова платформы выполнены в виде бесконтактных датчиков и закрепленной на платформе гребенки с планками-якорями, установленными с шагом, равным щагу гнезд клетей, и с якорями останова платформы в крайних верхнем, нижнем положениях и на уровне пола.
3.Устройство по п. 1, отличающееся тем, что фиксаторы для клетей выполнены
откидывающимися и имеют на внутренней поверхности направляющие для закатывания клети, переходящие в направляющие платформы.
iИсточники информации,
5 принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 605589, кл. А 23 В 4/04, 1975.
2.Авторское свидетельство СССР по заявке № 2943172/28-13, кл. А 23 В 4/04, 1980.
й%%% й%:; ;;;%% # ;
Ui:3
Buff А
+
/
f/
16
сУ
(риг.З
///////////////////////////7/ .
i
у,
у/У/
II
IсригЛ
/ //////////// у/ // у/
Ж
Ji // У/////////////////.
фиг. 6
