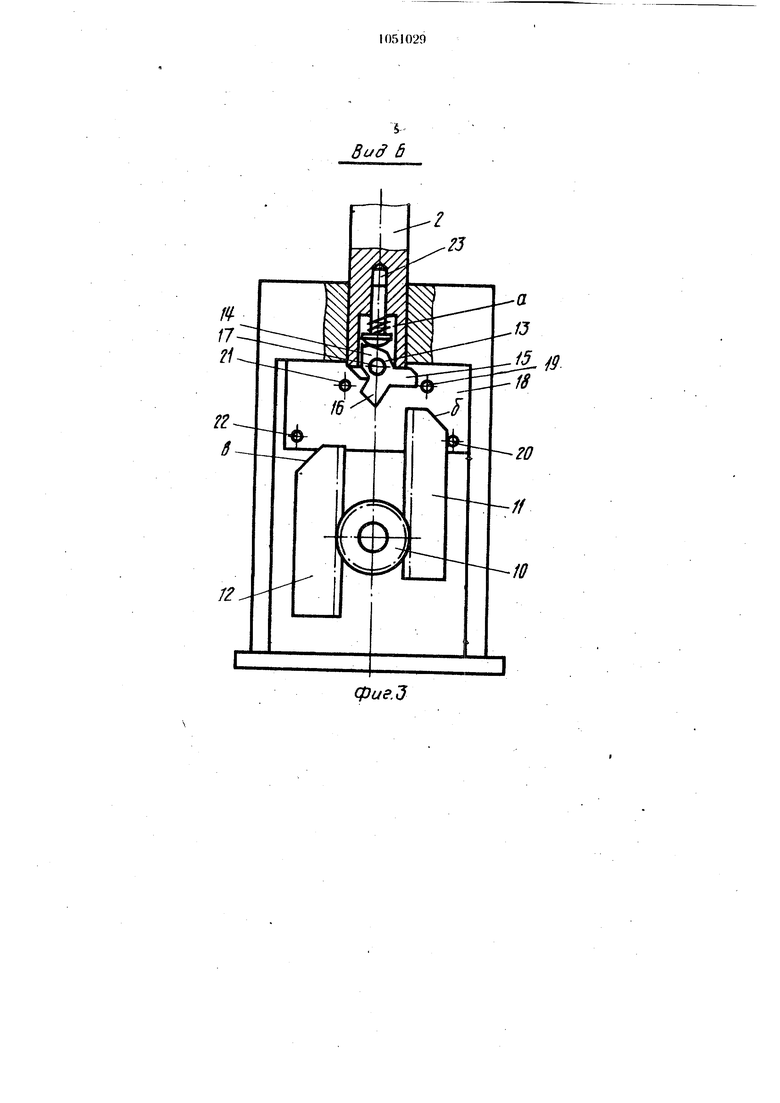
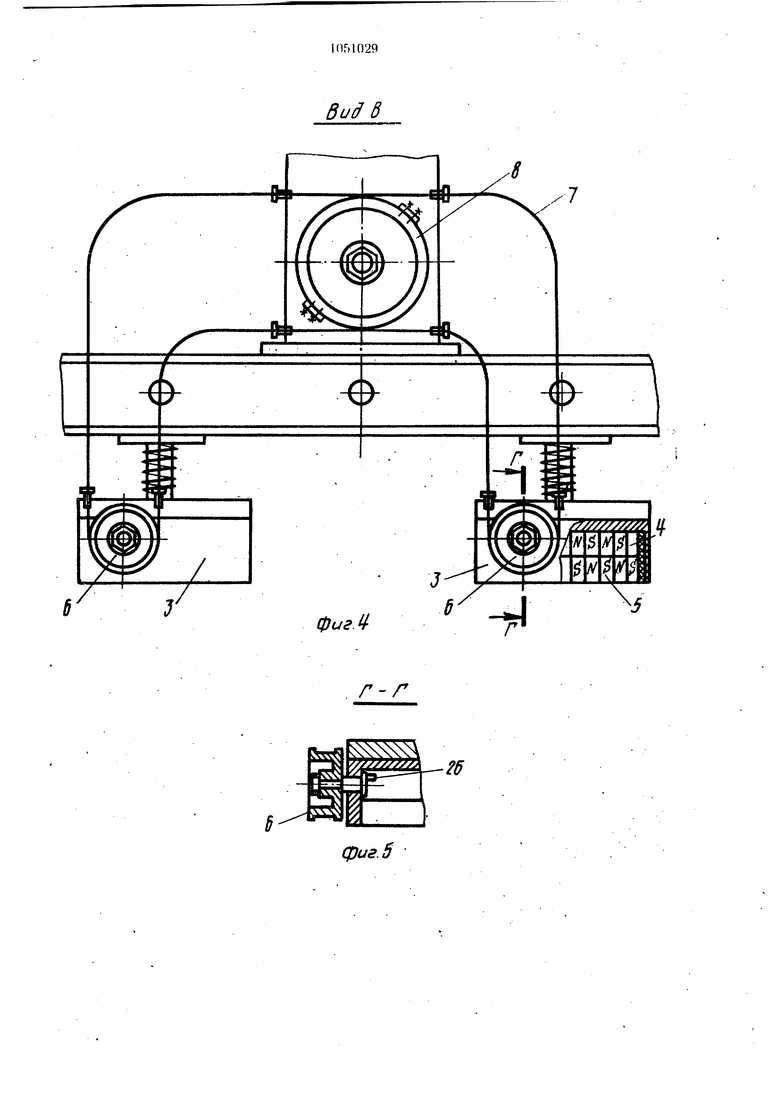
Изобретенир относится к rpaHcujpiiipn BaFiHK) грузов и может fii.rrf. шчто.чыопмно в конструкциях I .ч;1хн;гп1ы.х упройств, с автоматическим мпгитмым захватом. Известен автпмятический Mai иитный захват, содержащий траверсу с устамонленпой На ней с возможностью вертикального неремещения.подвеской, закрепленные На траверсе Kdpnyca с блоками постоянных подвижных и неподвижных магнитов и механизм управления подвижными магнитами, включающий в себя закрепленные на траверсе на общей осн ведунЫй барабан и нрофилированный диск, кинематически связанный с подвеской, ведомые барабаны, каждый нз которых установлен На корпусе блока магнитов с помощью оси и соединен гибкими тягами ведущим барабаном (1|. Механизм управления известного магнитного захвата нмеет профил1 ный кулачок и двуплечий рычаг, Н1арнирно закрепленный на подвеске. Одно плечо этого рычага подпружинено, а второе снабжено пальцем, взаимодействующим с вырезамн профильного кулачка. При перемещении подвескн вверх возможно отклонение оси тягового устройства от оси подвески. В результате этого возможно кратковременное заклини ванне подвески при быстром подъеме, между рабочей поверхность магнита и нлоскостью контакта груза может образоваться воздущный зазор до момента включения магнитов и не осуществляться захват груЦель изобретения - повыщение надежности работы захвата. Указанная цель достигается тем, что автоматический магнитный захват, содержа щнй траверсу с установленной на ней с воз можностью вертикального перемещени подвеской, закрепленные на траверсе корпуса с блокамн постоянных подвижных и неподвижных магнитов и механизм управлення подвижными магнитамн, включающий в себя закрепленные на траверсе на общей осн ведущнй барабан и профилированный диск, кинематически связанный с подвеской, ведомые барабаны, каждый из которых установлен на корпусе блока магнитов с помощью оси и соединен гибкими тягами с ведущим барабаном, снабжен установленным на траверсе с возможностью горизонтального перемещения ползуном с попарно закрепленными на нем упорамн, зубчатыми рейками, установленными с возможностью вертикального перемещения и взаимодействия с упорамн ползуна, подпружиненным толкателем, размещенным в выполненной в нижней части подвески полости, н закрепленным на подвеске трехплечим кулачком, одно плечо которого размещено с возможностью взаимодействия с толкателем, а два других - с возможностью поочере 1кио н.чаимо.Цйс Е(ия с соотн Г1гиун)1иими урюрами fi(w:iyna-H соотнетствукипими рейками, при 310М Н))офилир(|ца11ный днск ныюлнен в вило нкчггррни, находящейся в .нанепленни с .чубчатыми рейками. На фнг, 1 изображен автоматический магнитный захват, обгний вид; на фнг. 2 -сечение А-А на фиг. I; на фиг 3 вид по стрелке В на фиг. 2; pia фиг. 4 - вид по стрелке В на фиг. 2; на фиг. 5 -- сечение Г-Г на фиг. 4; на фиг. 6 - Положение элементов захвата при выключенных магнитах; на фиг. 7 -- то же, в момент включения магннтов; на фиг. 8 - то же, при включенных магнитах; на фи1. 9 -- то же, в момент выключения магнитов. Автоматический магнитный за.чват содержит траверсу 1 с установленной на ней с возможностью вертикального перемещения подвеской 2, Закрепленной на траверсе корпуса 3 с подвижными 4 и неподвижными 5 блоками постоянных магнитов, ведомые барабаны 6, установленные на каждом корпусе и соединенные гибкими тягами 7 с ведущим барабаном 8, закрепленным на осн 9, а также закрепленный на этой оси профилированный диск, выполненный в виде зубчатой щестеркн 10, взаимодействующей с зубчатыми рейками II и 12, установленными на траверсе I; трехплечий кулачок 13 с плечами 14-16, шарнирно закрепленный в полости а подвески 2 на оси- 17; ползун 18 с упорами ,19-22, жестко закрепленными на ползуне, подпружиненный толкатель 23, взаимодействующий с плечом 14 кулачка 13, и рычаги 24, выполненные с продольными сквозными пазами, шарннрно закрепленные на траверсе и взанмодействующне с подвеской 2 посредством их общей оси 25. Рейкн И и 12 выполнены со скощенными поверхностями бив. Автоматический маГнитный захват работает следующим образом. Захват опускается на изделие, и после соприкосновения его с грузом перемещенне траверсы 1 прекращается н начинается опускание подвески 2 .под действием рычагов; 24. Масса грузов на рычагах может регулироваться в зависимости от необходимого усилия переключения магнитов. Ход подвескн ограничивается соответствующими упорамн на рычагах. При опускании подвескн 2 трехплечнй кулачок 13 контактирует плечом 15 с торцом рейкн П н перемещает ее вниз. При этом рейка 11 поворачивает щестерню 10 н ведун.1ИЙ барабан 8 по часовой стрелке. При повороте барабана 8 тяга 7 обкатывается вокруг него и поворачивает ведомые барабаны 6, которые посредством поводков 26 перемешают подвижные блоки постоянных магнитов влево и тем самым приводят их во включенное положение.
Одновременно при повороте inei торми 10 по часопой стрелке рейка 12 поромппя ется вверх и «ступает во озанмояснгппискошенной пошрхиостьн) в с. упором 22 мол зуна 18. Под лействнем рейки 12 пол.уп 18 перемеп1ается в крайнее левое по/юже ние. При крайнем нижнем положении ноя вески 2 рейка 1 I занимает крайнее нижнее, а рейка 12 - крайнее верхнее положение.
При подъеме подвески 2 вверх тре.хплечий кулачок 13 контактирует плечом 15 с упором 19 ползуна 18 и поворачивается вокруг оси 17. При этом фнксация кулачка 13 в требуемом положении осуществляется подпружиненным толкателем 23 (фнг.З
Подвеска 2 занимает крайнее верхнее положение, и перемещение ее прекрашгается, после чего начинается подъем и последующее транспортирование всего захвата ч; грузом.
Опускаиие захвата производится до соприкосновения груза с монтажной илн другой площадкой. После этого перемещение траверсы 1 прекращается и начинается опускаине подвески 2. При опускании подвески 2 кулачок 13 контактирует плечом 16 с торцом рейки 12 и перемещает ее вниз. При этом рейка 12 поворачивает шестерню 10
и ведун1ий барабан 8 йрбтив часовой стрелкн. При повороте барабана 8 тяга 7 обкатывается вокруг него и поворачивает ведомые барабаны 6. которые носредством поBOHKoi Л; перемещают подвижные блоки
4 влево н выключают постоянные магииты. В этот момент подвеска 2 занимает крайнее нижнее положение. Одновременно при повороте шестерни 10 против часовой стрелки peiiK.i I I перемен1ается вверх и вступает
во взаимодействие скои1енной поверхностью б с упором 20 ползуна 18.
Под действием рейкн II ползун 18 перемен1ается в крайнее правое положение {фиг. 9). При подъеме подвески 2 вверх кулачок 13 контактирует плечом 16 с упором 21 ползуна 18 и при этом поворачивается вокруг осн 17
Фиксация кулачка 18 осуществляется .подпружиненным толкателем 23. Подвеска 2 занимает крайнее Bq)XHee положение н перемещение ее прекращается, захват переходит в транспортное положение без груза,
Предлагаемое выполнение автоматического магнитного захвата позволяет повысить надежность его работы.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический магнитный захват | 1978 |
|
SU789368A1 |
| Роторная машина для обработки ленточного материала | 1989 |
|
SU1666250A1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ДЛИНЫ СТЕЖКА | 2009 |
|
RU2441949C2 |
| ШВЕЙНАЯ МАШИНА ЗИГЗАГ | 2010 |
|
RU2415209C1 |
| Механизм для фиксации рабочих органов захватного устройства | 1983 |
|
SU1191414A1 |
| Устройство для управления группой исполнительных механизмов | 1986 |
|
SU1345180A1 |
| Устройство для мерной резки провода | 1981 |
|
SU1134266A1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |

АВТОМАТИЧЕСКИЙ МАГНИТНЫЙ ЗАХВАТ, содержащий траверсу с установленной на ней с возможностью вертикального перемещения подвеской, закрепленные на траверсе корпуса с блоками постоянных подвижных и неподвижных магнитов и механизм управления подвижными магнитами, включающий в себя закрепленные на траверсе на общей оси ведущий барабан и профилированный диск, кинематически связанный с подвеской, вгдомыс барабаны, каждый из которых установлен на корпусе .блока магнитов с помощью оси и соединен гибкими тягами с подушим барабаном, отличающийся тем, что, с целью повышения надежности работы, он снабжен установленными на транерсе с возможностью горизонтального перемещения нолзуном с попарно закрепленными на нем- упорами, зубчатыми рейками, установленными с возможностью вертикального перемещения и нзаимодействия с упорами ползуна, подпружиненным толкателем, размещенным в выполненной в нижней части подвески полости, и закрепленным на подвеске трехплечим кулачком, одно плечо которого разметено с возможностью взаимодействия с S с толкателем, а два других - с возможностью поочередного взаимодействия с со(Л ответствующими упорами ползуна и соответствующими рейками, при этом профилированный диск выполнен в виде цгестерни, находящейся в зацеплении с зубчатыми рейками., СП tc СО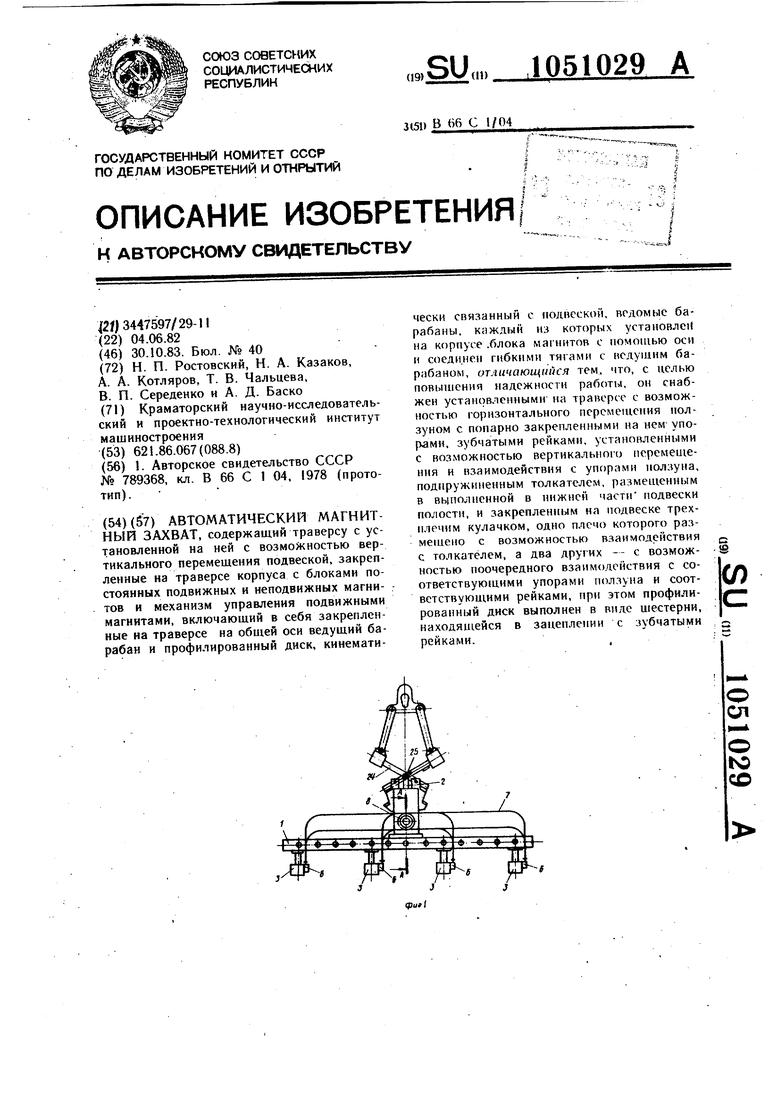
фиг.2
BU 6
фие.д
6uff 6
фигЛ
. r-r
фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматический магнитный захват | 1978 |
|
SU789368A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
