Изобретение относится к элементам оптических систем и может быть использовано для придания колебательных движений сканирующему элементу без механического воздействия со стороны устройств на объект его установки.
Известно сканирующее устройство, в котором компенсация моментов, действующих на объект, возникающих при изменении угловой скорости движения сканирующего элемента по величине и направлению, осуществляется путем придания противоположного по направлению движения дополнительным инерционным элементам, которыми снабжено устройство. В механиме сканирования соосно со сканирующим элементом установлен свободно вращающийся маховик. Связь между сканирующим элементом и маховиком осуществляетс через электромеханический привод, представляющий собой дугообразный магнит, закрепленный на сканирующем элементе, концы которого входят в соленоиды, закрепленные на маховике. Управление соленоидами осущ(гсвляется логическим блоком по сигналам позиционного датчика угла, ограничивающего угол рабочего хода сканирующего элемента. Таким образе, компенсация возникающих моментов осуществляется лишь при реверсе сканирующего элемента l .
Недостатк ом данного устройства является то, что поддержание требуемых параметров движения с достаточной точностью на рабочем ходу, между реверсами может быть осуществлено только с помощью механического воздействия на объект его установки.
Наиболее близким по технической сущности к предйагаемому является сканирующее устройство, в котором привод сканирующего устройства осуществляется электродвигателем, закрепленным на основании объекта, а компенсация момента, действующего на объект, осуществлявтси движением инерционного элемента (иэ) , связанного со сканирующим элементом редукторной передачей с осью вращения параллельной оси вращения сканирующего элемента. При этом передаточное число редуктора выбирают исходя иэ соотношения моментов инерции сканирующего элемента и инерционного элемента 2 .
Однако известное устройство характеризуется недостаточной точностью поддержания параметров движения, связанной с механическим способом компенсации момента, действующего на объект.
Цель изое5ретения - повьапение точности движения сканирующего элемента.
Йост 1вленная цель достигается тем, что сканирую1цее устройство, содержащее основар1ие, электродвигатель со статором, закрепленным на основании, сканирующий элемент, ус5 тановленный на выходном валу ротора электродвигателя, датчик положения Сканирующего элемента, блок управления и инерционный элемент с осью вращения параллельной оси вращения 0 сканирующего элемента, снг1бжено дополнительным электродвигателем со статором, закрепленным на основании, и валом ро.тора j соединенным . с инерционным элементом, при этом 15 обмотки роторов электродвигателей соединены мелсду собой встречно-последовательно и подключены к выходу блока управления.
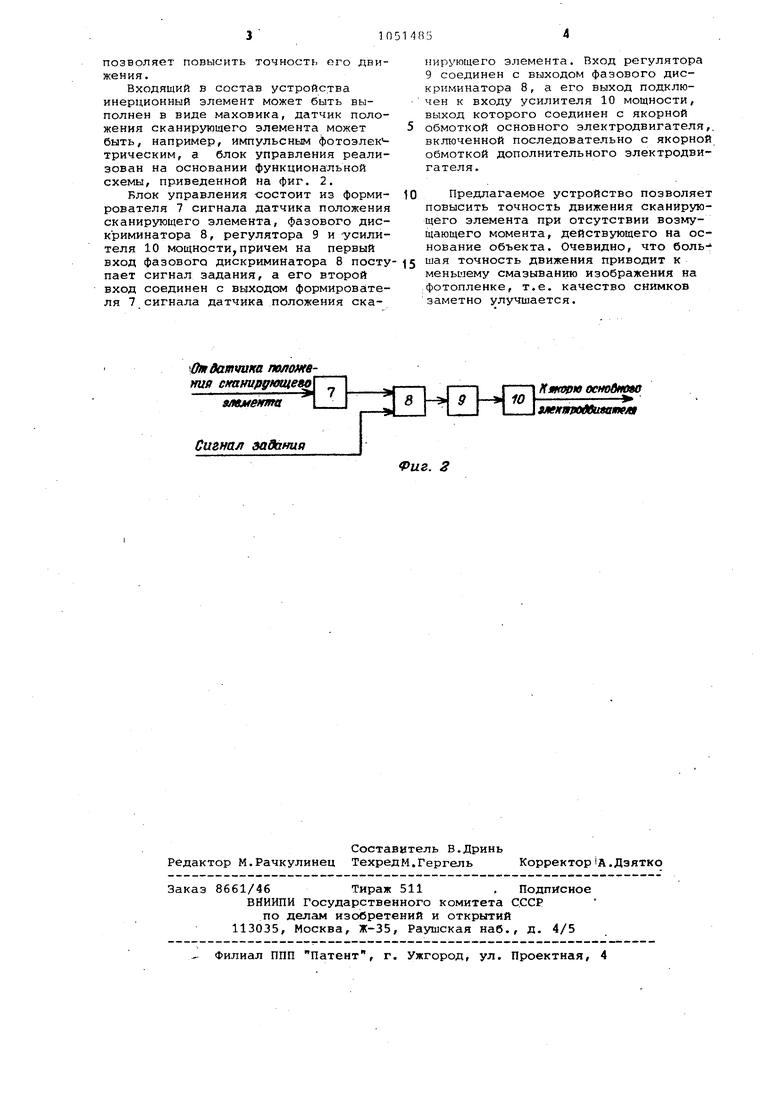
На фиг. 1 изображена функциональная схема сканирующего устройства; на фиг, 2 - функциональная схема блока управления.
Устройство сканирования содержит основной электродвигатель 1, с которым механически связан сканирующий 25 элемент 2 и датчик 3 положения сканирующего элемента. Дополнительный электродвигатель 4, электрические характеристики которого такие же, как у основного электродвигателя 1, 30 механически связан с инерционным элементом 5. Якорные обмотки двигателей 1 и 4 соединены последовательно между собой и подключены к выходу блока 6 управления, вход ко5 торого соединен с выходом датчика 3 положения сканирующего элемента.
Устройство сканирования: работает следующим образом.
0 Электродвигатель 1 приводит в движение сканирующий.элемент 2. Параметры движения сканирующего элемента 2 измеряются датчиком 3 положения. Выходной сигнал датчика 3 положения
5 поступает на вход блока б управления, где сравнивается с сигналом заДания. Блок б управления поддерживает ток в якорной обмотке электродвигателя 1 таким образом, чтобы параметры движения соответствовали заданию. Ток в якорной обмотке электродвигателя 4 равен току в якорной обмотке электродвигателя 1, поэтому при прочих равных условиях моменты, развиваемые электродвигателями 1 и
4, равны между собой, а поскольку двигатели соединяются встречно якорными обмотками, то моменты направлены также встречно, а следовательно компенсируют друг друга. СканирующиЯ 2 и инерционный 5 элементы не
имеют между собой механической связи, поэтому перемещение инерционного не приводит к возникновеHifio возмущающих моментов, приложен- ,
ных к сканирующему элементу, что
позволяет повысить точность его движения.
Входящий в состав устройства инерционный элемент может быть выполнен в виде маховика, датчик положения сканирующего элемента может быть, например, импульсным фотоэлек трическим, а блок управления реализован на основании функциональной схемы, приведенной на фиг. 2.
Блок управления -состоит из формирователя 7 сигнала датчика положения сканирующего элемента, фазового дискриминатора 8, регулятора 9 и -усилителя 10 мощности, причем на первый вход фазового дискриминатора 8 поступает сигнал задания, а его второй вход соединен с выходом формирователя 7 сигнала датчика положения скапирующего элемента. Вход регулятора 9 соединен с выходом фазового дискриминатора 8, а его выход подключен к входу усилителя 10 мощности, выход которого соединен с якорной обмоткой основного электродвигателя,, включенной последовательно с якорной обмоткой дополнительного электродвигателя.
0
Предлагаемое устройство позволяет повысить точность движения сканирующего элемента при отсутствии возмущающего момента, действующего на основание объекта. Очевидно, что боль- шая точность движения приводит к
5 меньшему смазыванию изображения на фотопленке, т.е. качество снимков заметно улучшается.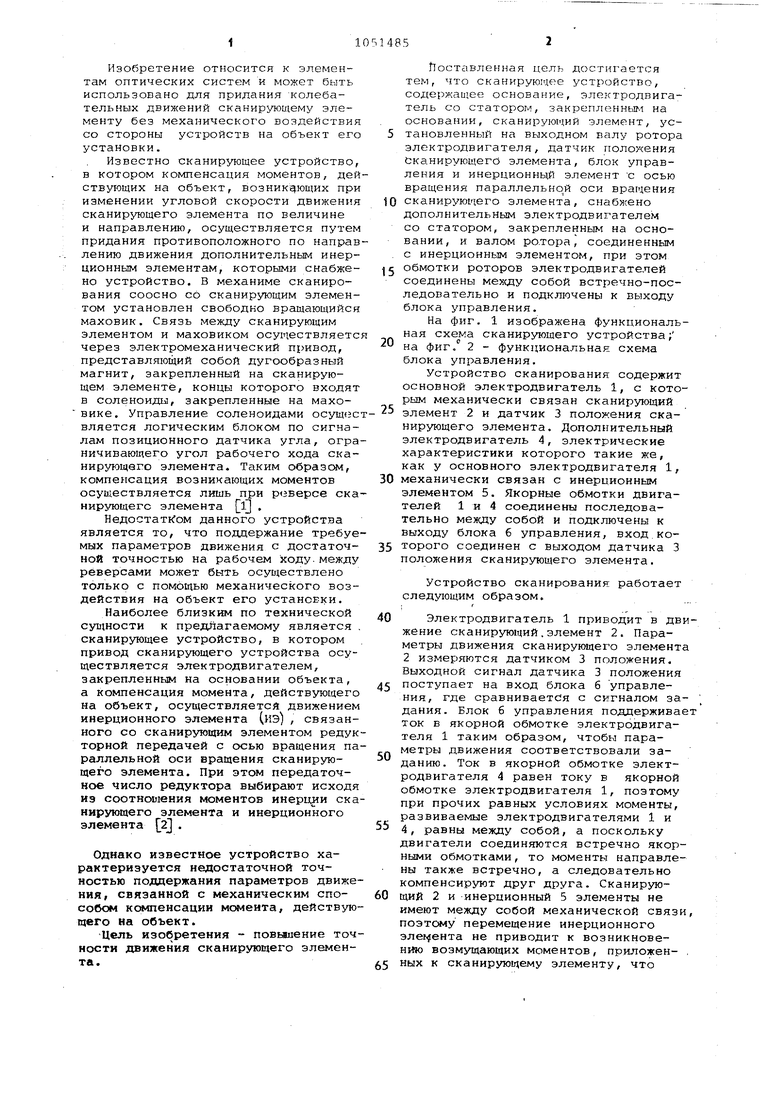
| название | год | авторы | номер документа |
|---|---|---|---|
| КОДИРУЮЩИЙ ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ СКАНИРУЮЩЕГО ЛУЧА В СИСТЕМЕ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМОГО ОБЪЕКТА | 1997 |
|
RU2117901C1 |
| Электропривод подъемной машины с переменными радиусами навивки канатов | 1982 |
|
SU1064408A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1985 |
|
SU1301757A2 |
| Сканирующий электропривод | 1990 |
|
SU1721780A1 |
| Безредукторный бесконтактный следящий электропривод | 1981 |
|
SU1001412A1 |
| Электропривод моталок | 1974 |
|
SU492330A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| Автоматический стенд для испытания передач | 1985 |
|
SU1295260A1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
Риг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сервоусилитель | 1987 |
|
SU1418682A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент Великобритании 1520845, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
