1
Изобретение относится к обработке металлов давлением и может быть испельэовано для привода моталок в лентопро- катных цехах.
Известен электропривод моталок, содер жащий электродвигатели постоянного тока, якорные цепи которых соединены последовательно и при помощи энергоотбирающего элемента, например резистора, подключеНЫ к выпрямителю, вход которого ПОДКЛЮчен к выходу трехфазного индуктивно-емкостного источника тока, а обмотки возбуждения двигателей подклю«юны к регулируемым блокам питания, отя яз управляющих входов каждого из которых соединен с блоком, формирующим сигнал натяжения, пропорциональный радиусу бунта соответствующей моталки.
Цель изобретения - повысить точность поддержания натяжения изделия на заданном уровне при установившихся и особенно при переходных процессах, например при его пуске или торможении.
Предлагаемый электропривод отличается от известного тем, что второй из
управояющих входов каждого из блоков питания соединен с блоке, формирующим сигнал движения, пропорциональный необходимому для изме(1ен11Я скорости движения изделия динамическому моменту, и связанным с блоком сравнения, входы ко торого соединены с элементами задания контроля скорости движения изделия, а также содержащим элементы ограничения псщожительных и отрицательных сигналов на выходец а третий из управляющих входов каждого из блоков питания соединен с блоком, формирующим сигналы компенсации моментов механических потерь в кинематических цепях и двигателях моталок
В простейшем случае элемент задания скорости движения изделия выполнен в виде источника напряжения, а элемент контроля:этой скорости - в виде датчика напряжения на якорной цепи одного из дви гателей моталок.
Характеристики электропривода моталок формируются наиболее просто, когда блоки, формирующие сигналы натяжения и движения, подаваемые на управляющие
3
входа 1 блоков питания, соединены с соот ветствуюшими измерителями радиусов бунтов моталок.
Простейший вариант схемной реализации предлагаемого электропривода моталок достигается, если блоки питания выполнены в виде магнитных усилителей, зажимы обмоток управления которых служат :iix управляющим й входа1ий, блоки, формн : рующиё игналынатяжения,и блоки форми рующие сигналы движения, выполнены в виде последовательных цепей, образованных регулируемыми от соответствующих измерителей радиусов бунтов моталок резисторами и включенных последовательно с обмотками управления магнитных усилителей
причем цепи, формирующие сигналы напряжения, подсоединены параллельно к источнику стабилизированного напряжения,а
цепи, формирующиесигналы движения,
подсоединены параллельно к последовательной цепи встречно включенных стабидидз :нов и включены последовательно с источником напряжения, являющимся элементом задания скорости движения изделия, и резистором между зажимами якорной цепи одного из двигателей моталок, а блок, формирующий сигналы компенсации моментов механических потерь в кинематических цепях и двигателях моталок, вьшолнен в виде последовательной цепи, образованной регулируемым резистором и источником напрялсения и включенной последовательно с обмотками управления магнитных усилителей, зажимы которых служат третьими из управляющих входов блоков питания.
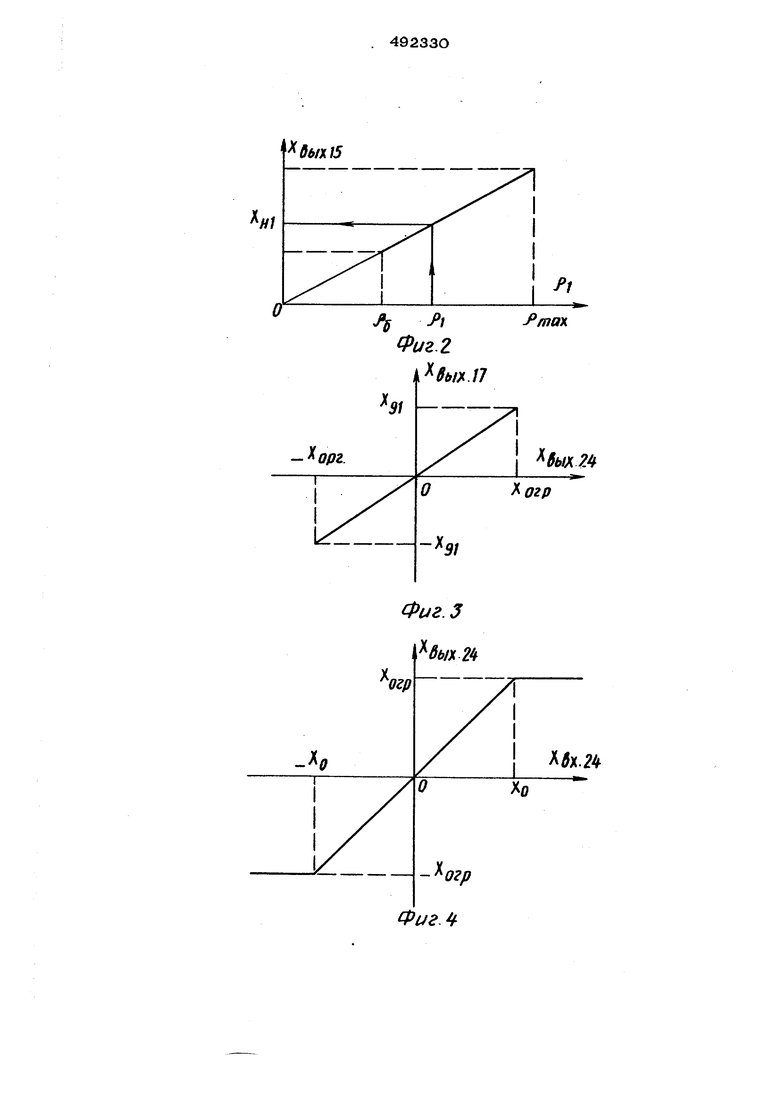
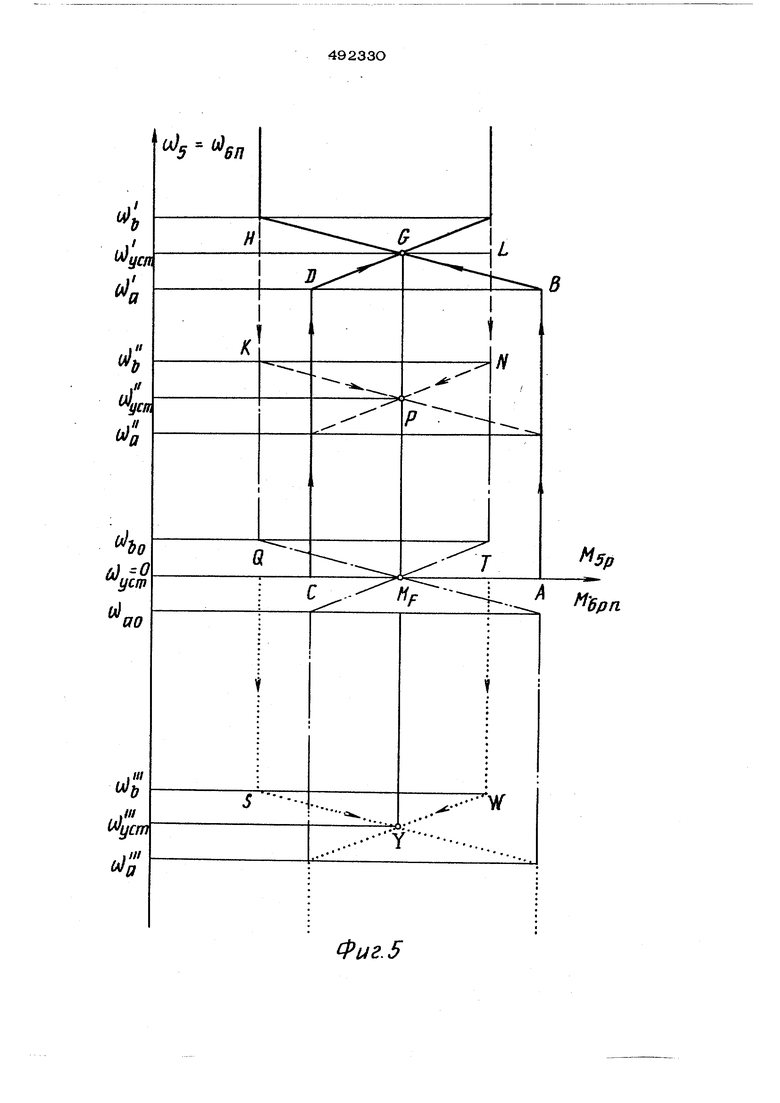
На фиг. 1 дана структурная схема электропривода моталок; на фиг. 2-4 графики, характеризующие работу блоков электропривода; на фиг. 5 приведены совмещенные механические характеристики двигателей моталок; на фиг. 6 - дана принципиальная схема электропривода моталок, простейший вариант.
Устройство содержит левую 1 и правую 2 моталки через свои редукторы 3 и 4, соединенные с валами якорей 5 и 6 двигателей постоянного тока, обмотки возбулсдения 7 и 8 которых соответственно подключены к регу/шруемым блокам питания 9 и 10, выполненным в виде, например усилите шй. Обмотки якорей 5 и 6 двигателей моталок и энергоотбирающий элемент 11, например резистор, образуют последовательную цепь, которая подключена к выпрямителю 12, включенному на выходе трехфазного индуктивно-емкостноро источника тока 13, питающегося от трехфазной сети А, В и С. Элемент 14 выполнен в виде технологического устройства, предназначенного для обработки изделия, либо устройства, контролирующего его параметры.
Управляющие входы блоков питания 9 и 1О соединены с выходами блоков 15 и 16 17 и 18 соответственно, которые формируют сигналы управления электроприводом моталок, например, с помощью сигналов 19
к 2D поступающих от измерителей 21 и 22, контролирующих радиусы бунтов моталок. Третьи управляющие входы блоков питания 9 и Ю соединены с выходами блока 23, формирующего сигналы компенсации
. моментов механических потерь в кинематических цепях и двигателях моталок. Блоки 17 и 18 соединены с выходом блока сра&нения 24, входы которого соединены с элементом 25 задания скорости и элементом 26 контроля скорости движения издели
Работу электропривода моталок проще всего рассмотреть для случая, когда равны силь датяжения изделия Fi и Fo
-;. .-- . . -1Ь
а также равнь( инейные с йрости его перемещения V . и, V, у левой 1 и правой
v . ,, 2, У
при F, 2 моталок соответственно.
т, е.
V,
F F
V,
Это возможно.
и
t
если элемент 14 выподарн р виде технологического устройства, обрабатьюающего изделие без механического воздействия на него, либо устройства, контролирующего параметры изделия. При этом будем полагать, что двигатели, блоки питания их обмоток возбуждения, редукторы, барабаны и другие элементы кинематических цепей моталок одинаковы.
Цепи якорей 5 и 6 двигателей моталок и энергоотбирающий элемент 11 обтекаются постоянным по величине током I OfiSt
что обеспечивается благодаря выпрямлению токов нагрузки трехфазного индуктивноемкостного источника тока 13, Поэтому имеется возможность формировать
М дйиэлектромагнитные моменты Ми
гателей моталок, изменяя их потоки возбуждения. Если считать, что магнитные системы двигателей не насьпцены, т. е, справедлива линейная зависимость между их потоками и токами возбуждения, обусловливаемая коэффициентом пропорциональности К1
и обозначить коэффициент
усиления блоков питания 9 и 10 через |
то электромагнитные моменты двигателей с учетом знаков действия сигналов управления и компенсации моментов механических потерь определяется в общем виде как
60 M6 VKyIa(Xjrtx.,5 Bbix.n
) И)
t X
выл 23 M5 KKb-K,I.,,.,,:FX,,x.23).j где К - конструктивный коэффициент двигателей моталок; 15 ых16 бых17 bixl8 - сигналы управдения на вьосоде блоков 15, 16, 17 и 18 соответ ствннно; X - сигнал компенсации момента вых23 механических потерь в кинематической цеп и двигателе моталки на выходе блока 23, верхние знаки при котором справедливы, когда левая моталка 1 наматывает иэде- |лие, а нижние знаки -когда она его разма вает. Блок 15 (см. фиг. 2) формирует сигнал натяжения X , величина которог пропорциональна радиусу О бунта левой / моталки 1, Если коэффициент пропорциоцельности сигнала натяжения обозначить К , то получим равенство фиг. 2, где fg - радиус барабана моталки, показано текущее значение X , X . Для правой моталки 2. ВЫХ15 н1 радиус бунта которой равен Р гичный сигнал натяжения формируется бло ком 16: Блоки 17 и 18 (см. фиг. 3) формируют сигналы движения для левой и правой моталок соответственно согласно уравнениям , где X К д1 д X ,„-Х X , где X „ К . ВЫХ 18 огр ВЫХ 24д2 д где К - коэффициент пропорциональности сигналов движения; It и 7 - суммарные моменты инер ции кинематических цепей и двигателей ле вой и правой моталок соответственно, при веденные к валам якорей 5 и 6; X 24 сигнал на выходе блока сра ;иен11я 24 J X - наибольшая величина сигнала ВЫХ 2 4 рграничение значений положительных и отрицательных сигналов на выходе блока равнения 24 на одинаковом уровне (см. иг. 4) позволяет обеспечить подобное ротекание переходных процессов при оаяоне и торможении электропривода. Харакеристики блока сравнения 24 могут быть / ыражены следующими равенствами;, i ых. .24 . oxt Xпри X Х ; /0 вых. 24 огр. ВХ.24 о (w ых.. . Входным сигналом X блока сравне««« 4 является разница между сигналом X „(.. на выходе элемента 25 задания скорости и сигналом X на выходе блока 26 ее контроля, т. е. будет справедливо равенство вх24 ых25 вых26 Заданные значения силы натяжения изделш Fa н его ускорения / для Vdt /3 предлагаемого электропривода определяются соотношешшми: Гз ПККьК,К„1 И dV 1 / UV 1 virvT b 9 а компенсация момента механических потерь М в кинематической цепи и двигателе каждой из моталок обеспечивается, если ,ItfXe,) Фактические величины силы натяжения изделия F и его ускорения А, обусловdtливаются следующей системой уравнений движени5| электропривода моталок: 5p H VT t4in4f в которой верхние знаки - при наматьшании изделия, а нижние - при его разматывании на левой моталке 1, Отсюда фактическая величина силы натяжения изделия F опре- делится зависимостью pi «a (():i Г1 , a При выполнений условия (13) в предлагаем ом электроприводе моталок согласно выражениям (1) и (2) формируются величи ны «/p- i I,X,)«ft «6p- t J3 el.,.. после постановки которых в зависимость (14) с учетом уравнений (3)-(6) и cooi л. / J 4.ivj т |.j(, - / . /1 -1 ношения (11) найдем, что при любых значениях сигнала X „ ,, на выходе блока вых сравнения F F i , т, е. фактическая . . S ., величина силы натяжения изделия равна ее заданному значению как в установившихся так и в переходных процессах при разгоне и торможении. Наглядно представить работу электропривода можно,если рассмотреть совмещен ные механические характеристики двигате лей моталок (см. фиг. 6), где Оо -угловая частота вращения вала двигателя левой моталки, а СО/, и Mgjjri -угловая частота вращения вала двигателя правой мотшнси (jOg и момент М,., приведенные к валу двигателя левой моталки по соотношениям:ч„-Ь (,, Д и . ), Если X вьсс25 ых26 согласно равенству (1О) величина X вх24 V ° справедливо равенство (8). Тогда по величинам (15) и (16) с учетом уравнений (3)-(6), соотношений (11), (12) и (17) получим следующие уравнения М 5 l l5rMj- -p-ntjY-)j Jfi idV )n Hyт: (ji) , Таким образом, если моталки находяч ся в неподвижном состоянии и .задано зна вь«2б 0 чение X. (Х вых 25 ляется пуск электропривода в направлении, при котором левая моталка 1 наматывает изделие, а правая 2 его разматывает, Этон му режиму I соответствуют участки механических характеристик АВ для двигателя левой моталки и CD для двигателя |правой моталки, если полагать, что величины Д . 5 Р переходных процессах практически не изменяются (см. фиг. 5}. Величина X„ достигает ОС - rk) при значения X ВЫХ25 О вьос26 ( (jQr, . Для значении л ., J 6П вых.26 при которых - - о вх24 О ливо равенство (7), по величинам (15) и (16), если учесть уравнения (3)-(6) и соотношения (11), (12) и (17), найдем уравнения движения ), И 1б (dV ч бх.г( м - и А, f(ir) б|)П- Г1у- f откуда следует, что V т. е. дсхгтигается установившийся режим работы электропривода, нри X- О, ЧТО согласно равенству (Ю) вьшолляется, когда X X. Для расвь Х,2о ВЫХ.25 сматриваемого пуска электроприводи Р ых.25 : по уравнениям (18) и (19) соочветствуют участки механических характеристик BG для двигателя левой моталки и DG для двигателя правой моталки, а установившийся, режим работы достигается в точке G при Wg COg( оУ, когда X вых 26 вых. 25 Если затем необходимо уменьшить скорость перемещения изделия до значеняя, которому соответствует wL, Lr , i задается величина X -.Х .,,.. вых.2Ь вых,2Ь.,; При X- X or.С-Х,- справедливо ВЫХ.25 вых,26 О равенство (9) и следующие уривиения движения: Ij , а V д- ut ;j | . n(} ( г T. которым соответствуют участки механиче i ских характеристик НК для двигателя левой моталки и LH для двигателя правой моталки. Величина X „„ умень ВЫХ.2О шается до значения X „ {Х „„ ВЫХ.26ных;25 X ) при Wj-C0g со . Далее для значений ьЫ.26 Р« которых - Хр4: Х, О справедливы уравнения движения (18) и (19), которым соответствуют участки механических характеристик КР для двигателя левой моталки и N Р для двигате , ля правой моталки. Установившийся режим работы достигается в точке Р при е и CD,;., Cu , когда X ос X „. оП стВЫХ.26 вых25 Анад|огично осуществляется торможение электропривода ДО g О г его останов. Для пуска элекррропривода в направлении, при котором левая моталка 1 разматывает издение, а правая 2 его наматывает, изменяется знак сигнала компенсации моментов механических потерь и задается „(Х ВЫХ.25 ВЫХ.25 вых,26 -XQ). Тогда/X,XQ и справедливы уравнения движения (2О) и t21), которым на фиг. 5 соответствуют участки механических характеристик Q S для двигателя левой моталки и Т W для двигателя правой моталки. При этом абсолютная величина отрицательного сигнала XувеяичиЗЫХ Окается и достигает значения X гч „вых2Ь О Р« Д™ значений X, при которых -X $. Бх24 справедливы уравнения движення (18) и (19), поэтому двигатель левой мота/1ки разгоняется по SY двигатель правой моталки - по V Установившийся режим работы достигается в точке Y при , когда т X X вых,2 6 5 Таким образом, в предлагаеь)ом элек1Ер прнводе обеспечивается подобное протекание переходных процессов при разгоне и торможении с заданной силой натяжения издeл ш и заданным ускорением независимо от направления движения изделия. Точ; посч-ь поддержания заданной силы натяжеI ния изделия в установившихся режимах ра боты электропривода обеспечивается благодаря компенсации моментов механических потерь в кинематических цепях и двигателях моталок и пропорциональности сигналов натяжения радиусам бунтов. Из соотношений (11) и (12) следует, что задаваемые значения силы натяжения изделия и его ускорение при переходных процессах могут регулироваться изменением величины тока Ij , протекающего в якорных цепях двигателей моталок, если применить регулируемый индуктивно-емкостной источник тока 13. При этом соблюдение условия компенсации момента механическнх потерь в кинематической цепи и i двигателе каждой из моталок может быть обеспечено согласно уравнению (13) соответствующим изменением величины сит нала X ВЫХ.23Энергоотбирающий элемент 11, например резистор, предназначен для обеспечения нормального режима работы выпрямителя 12, выполненного по трехфазной мостовой схема, при торможении электропривода, когда алгебраическая сумма иапрял.еНИИ на якорных цепях двигателей моталок совпадает по направлению с током 1 , Как элемент 25 задания скорости движения изделия может использоваться источгник напряжения, например потенциометр, а элемент 26 контроля этой скорости может быть вьшолнен для простоты в виде датчика напряжения на якорной цепи одного из двигателей моталок. Если контролируется напряжение на якоре 5 двигателя левой J, L Pa+l моталки, т. е. 5 М Я ь у вых. ых.17 ых. активное сопротивление якоря двигателя и flVTO X О, когда леьая моЪ г вых,о талка наматьшает изделие, то с учетом уравнений (3) и (5) найдем, что II -Г .f -nkK К /1 (П у)Хоп, BbiX2t j т, е. чем больше скорость движения изделия у больше контролируемое напряжение. Из выражения (22) следует, что наличие при переходнь1Х процессах переменного по величине сигнала X вых.2/1 обусловит некоторую нелинейность c-joruei ствуюних участков механических xaptiKTeристык двигателей моталок, а при установившихся режимах работы, когда X ЦЫХ.24 О, определенное изменение Ur , а по,--....Д Уому и скорости движения издепия V , 1 обусловятся г изменением радиуса бунта моталки JO . Для формирования сигналов натяжения и движения могут быть использованы регу лируемые от измерителей радиусов бунтов моталок резисторы, сельсины, поворотные трансформаторы и другие устройства питания 9 и 10 обмоток возбуждения двчгателей моталок выполнены в виде магнитных усилителей, обмотки управления которых 27и 28, 29 и ЗО, 31 и 32, использукур ся для заведения сигналов натяжения, сигн лов движения, сигналов компенсации момен том механических потерь в кинематических цепях и двигателях .моталок, соответственно (см. фиг. 6). Таким образом, управляющими входами блоков питания 9 и 1О служат зажимы обмоток управления 27 29, 31 и 28, 30, 32, а указанными сигналами являются токи, протекающие по этим обмоткам. Сигналы натяжения для левой и правой моталок формируются с помощью регулируемых резисторов 33 и 34 соответственно, образующих с обмотками управления 27 и 28последовательные цепи, включенные параллельно стабилитрону 35, который , через балластный резистор 36 подключен к источнику постоянного напряжения. Выполнение зависимостей (3) и (4) достига;ется в результате регулирования величин сопротивлений резисторов 33 и 34 сигналами 19 и 2О, поступающими от измерителей 21 и 22 радиусов бунтов, Сигналы движения формируются с помощью регулнруемь1х резисторов 37 и 38, образующих с обмотками управления 29 и ЗО последовате;шные цепи, которые подключены параллельно цепи из встречно вкюоченных стабилитронов 39 и 40 и включены последовательно с потенциомет- ром 41, питающимся от источника напряжения через контактный мост 42, и резистором 43 между зажимами якорной цепи двигателя левой моталки. Зависимости (5) и (6) выполнимы та же при регулировании величин сопротив ний резисторов 37 и 38 сигналами 19 и 20. Для компенсации момента механических :потерь в кинематической цепи и двигателе каждой из моталок используются обмотки управлеипя 31 и 32, включенные с регулируемым резистором 44 в последовательную цепь, питаемую от источника напряжения через контактный мост 42. I Напряжение U, , снимаемое с по тенцнометра 41, являющегося элементом задания скорости движения изделия, сравнивается через элементы 39, 4О и 43, образующие блок сравнения, с напряжением Uc по формуле (22), на якоре 5 двигателя левой моталки. Поэтому для схемы на |4яг.6 величины 24 3 О UCT; Х Uc-r, где UCT - Рабочве напряжение стабилитронов 39 и 4О, которые одинаковы для обеспечешгя симметричной характеристики блока сравнения, как показано на фиг. 4, Благодаря этому обеспечивается подобное протекание переходных процессов при разгоне и торможении электропривода. Необходимо отметить,также, что для схемы на фиг. 6 участки механических двигателей моталок, для которых справедливы уравнения движения (18) и (19), обладают определенной нелинейностью в результате зависимости по формуле () напряжения Ug от величины изменяющегося при этом сигнала X „ .. Кроме того, как следует из фор- ВЫХ. т мулы (22) в установившихся режимах работы электропривода будет проявляться некоторая зависимость скорости движения изделия от величины радиуса бунта левой моталки. Предмет изобретения 1. Электропривод моталок при смоткеразмотке, содержащий электродвигатели постоянного тока, якорные цепи которых соединены последовательно и при помощи энергоотбирающего элемента, например резистора, подключены к выпрямителю, вход которого подсоединен к выходу трехфазного индуктивно-емкостного источника тока, а обмотки возбуждения двигателей подклю-; чены к регулируемым блокам питания, один из управляющих входов каждого из которых соединен с блоком, формирующим сигнал натяжения, пропорциональный радиусу бунта соответствующей моталки, о т л и ч аю щ и и с я тем, что, с целью пов1.ш1енля точности поддержания натяжения изделия на заданном уровне при переходных и установивщихся процессах, второй из управ/шющих входов каждого из блоков питания соединен с блоком, формирующим сигнал движения, пропорциональный необходимому для изменения скорости движе- I ния изделия динамическому моменту, и связанным с блоком сравнения, входы которого соединены с элементами задания и контроля скорости движения изделия, а также содержащим элементы ограничения положительных и отрицательных сигналов (
13
на выходе, а третий из управляющих входов каждого из блоков питания соединен с блоком, формирующим сигналы компенсации моментов механических потерь в кинематических цепях и двигателях моталок,
2.Электропривод по п. 1, о т л ичающийся тем, что элемент задания скорости движения изделия вьтолнен
в виде источника напряжения, а элемент контроля этой скорости - в виде датчика напряжения на якорной цепи одного из двигателей моталок.
3.Электропривод по пп. 1 и 2, о т л чающийся тем, что блоки питания выполнены в виде магнитных усилителей, зажимы обмоток управления которых служат их управляющими входами, блоки, формирующие сигналы натяжения, и блоки, формирующие сигналы движения, выполнепы в виде последовательных цепей, образованных регулируемыми от соответствующих измерителей радиусов бунтов моталок
14
резисторами и включенных последовательно с обмотками управления магнитных усилителей, причем цепи, формирующие сигналы натяжения, подсоединены параллельно к источнику стабилизированного напряжения, а цепи, формирующие сигналы движения, подсоединены параллельно к последовательной цепи встречно включенных стабилитронов и включены последовательно с источником напр5ажения, являющимся элементом задания скорости движения изделия, и резистором между зажимами якорной цепи одного из двит ателей моталок, а блок, формирующий сигнаш:. компенсации моментов механических потерь в кинематических цепях и двигателях моталок, выполнен в виде последовательной цепи, образоваьшой регулируемым резистором и источником напряжения и включенной поспедаватегазно с обмотками управления усилителей, зажимы которых служат третьими из yпpaвJшюulиx входов блоков питания.
иг. 1
22
Ош15
Hl


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ намотки мелкосортногопРОКАТА B буНТы | 1979 |
|
SU835559A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ СКОРОСТИ ВХОДА МЕТАЛЛА В КЛЕТЬ ПРИ ПРОКАТКЕ | 1973 |
|
SU405614A1 |
| Устройство для регулирования натяжения при намотке мелкосортного проката | 1980 |
|
SU871874A1 |
| Устройство для регулирования натяже-Ния пОлОСы пРи CMOTKE B РулОН | 1979 |
|
SU850243A1 |
| БИБЛИОТЕКА jМ. Л. Прудков | 1972 |
|
SU338980A1 |
| Электропривод моталки проволочного стана горячей прокатки | 1973 |
|
SU507382A1 |
| Квазиоптимальная система автоматического регулирования натяжения полосы на прокатном стане | 1976 |
|
SU578134A1 |
| Устройство для регулирования натяжения проволоки при намотке | 1981 |
|
SU959864A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВХОДА МЕТАЛЛА | 1973 |
|
SU404526A1 |
| ЭЛЕКТРОПРИВОД МОТАЛОК СТАНА ХОЛОДНОЙ ПРОКАТКИ | 1940 |
|
SU69547A1 |


Л
1
Л Фиг.г
Фиг.З выл2
--Х/
огр
(
Хо
Х
г/
ФигЛ
ffue.5
