Изобретение относится к электротехнике и может быть использовано при создании систем сканирования на базе трехфазных микродвигателей с ротором из постоянных магнитов, например, моментных бесконтак-1- тных.
Известен сканирующий электропривод с асинхронным двигателем, содержащий преобразователь частоты, в который введены фазовый детектор, делители частоты и преобразователь напряжение - частота, соединенный выходом с входами делителя детектора. Недостатком известного электропривода является отсутствие возможности управления законом, движения в процессе сканирования и сложность конструкции, связанная с наличием преобразователя частоты.
Наиболее близким по технической сущности и достигаемому результату является сканирующий электропривод с двигателем, принятый в качестве прототипа и содержащий блок управления, состоящий из каналов грубой и точной установки, канал грубой установки включает реверсивный счетчик, с выходами которого соединены последовательно включенные программируемые за- поминающие устройства, цифроаналоговые преобразователи, регуляторы тока, формирующие требуемые законы изменения фазных токов, канал точной установки содержит контур электронного демпфирования, связанный с датчиком положения ротора. Однако в системе точность слежения и позиционирования определяется ценой шагового электродвигателя.
I
ГО
Цель изобретения - повышение точности слежения и позиционирования.
Указанная цель достигается тем, что канал управления грубой установкой угла поворота трехфазного двигателя выполнен в виде коммутаторов блоков шунтов, блоков шунтов и узла управления коммутаторами блоков шунтов, канал управления точной установкой угла поворота выполнен в виде сравнивающего узла и блока точного регулирования угла поворота, вход узла управления коммутаторами блоков шунтов соединен с блоком задания движения, а один из выходов соединен с одним из коммутаторов блока шунтов, соединяющим один из .блоков шунтов с одной из обмоток, другой выход соединен с вторым коммутатором блока шунтов, соединяющим второй блок шунтов с второй обмоткой, причем эти обмотки соединены встречно между собой и последовательно с источником постоянного напряжения, один из входов сравнивающего узла соединен с блоком задания движения, другой вход соединен с датчиком положения ротора, а выход - с входом блока точного регулирования угла поворота, выход которого соединен с третьей обмоткой статора. Сопоставительный анализ с прототипом показывает, что предлагаемый -электропривод отличается выполнением канала управления грубой установки в виде коммутаторов блоков шунтов, блоков шунтов и узла управления коммутаторами блоков шунтов и канала управления |очной установкой в виде сравнивающего узла, блока точного регулирования и датчика положения ротора и соединением блоков шунтов с двумя обмотками статора, включенными встречно между собой и последовательно с источником постоянного напряжения, а третьей обмотки статора с каналом управления точной установкой.
Сущность изобретения заключается в том, что возмущающие воздействия, вызванные нестабильностью напряжения, мо- - ментами трения, разбросом температурных характеристик, компенсируются изменением магнитного потока третьей обмотки статора.
Изобретение поясняется чертежом.
Сканирующий электропривод содержит трехфазный двигатель с блоком управления 1, состоящим из канала управления грубой установкой угла поворота 2 и канала управления точной установкой угла по- во.рота 3, канал управления грубой установкой угла поворота 2 выполнен в виде коммутаторов блоков шунтов 4,5, блоков шунтов 6, 7 и узла управления коммутаторами.блоков шунтов 8, канала управления точной установкой угла поворота 3 выполнен в виде сравнивающего узла 9 и блока точногр регулирования угла поворота 10,
вход узла управления коммутаторами блоков шунтов 8 соединен с блоком задания движения 11, а один из выходов соединен с одним из коммутаторов блока шунтов 4, соединяющим один из блоков шунтов 6 с
0 одной из обмоток 12, другой выход соединен с вторым коммутатором блока шунтов 5, соединяющим блок шунтов 7 с второй обмоткой 13, эти обмотки соединены встречно между собой и последовательно
5 с источником постоянного напряжения 14. один из входов сравнивающего узла 9, соединен с блоком задания движения 11, другой вход соединен с датчиком положения ротора 15. а выход - с входом блока
0 точного регулирования угла поворота 10. выход которого соединен с третьей обмоткой статора 16.
Электропривод работает следующим образом.
5В зависимости рттребуемого направления вращения узел управления коммутаторами блока шунтов 8 через коммутаторы блоков шунтов 4, 5 изменяет сопротивление блоков шунтов 6, 7. Эти сопротивления го0 раздо меньше сопротивления обмоток статора 12, 13. При равенстве сопротивлений блоков шунтов 6, 7 ось поля находится в начальном состоянии. Увеличение сопротивления блока шунтов б или 7 приводит
5 соответственно к уменьшению или увеличению магнитного потока обмоток 12 и 13, что позволяет отклонять ось магнитного поля в пределах регулирования ±30°. Ось пульсаг ций магнитного потока обмотки 16 направ0 лена ортогонально оси пульсаций магнитного потока обмоток 12 и 13 при равенстве токов в них, поэтому малое его изменение оказывает существенное влияние. Управление этим потоком осуществляется
5 блоком точного регулирования угла поворота 1.0 и вырабатывается после сравнения в сравнивающем узле 9 сигналов с блока задания движения 11 и датчика положения ротора 15.
0 Применение предлагаемого электропривода повышает точность слежения и позиционирования, предоставляя возможность управления законом движения внутри интервала сканирования, получения закона
5 движения, близкого к линейному при неконтролируемых возмущениях (нестабильность напряжения, момент трения, разброс температурных характеристик и т.д.). Не предъявляется жестких требований к блокам управления.
Формула изобретения Сканирующий электропривод, содержащий трехфазный дв игатель с блоком управления, включающим каналы грубой и точной установки угла поворота, соединенным с обмотками статора и датчиком положения ротора электродвигателя, от я и чающийся тем, что, с целью повышения точности слежения и позиционирования, в него введен блока задания движения, канал управления грубой установкой yffia поворота выполнен в виде двух блоков шунтов, их коммутаторов и узла управления коммутаторами, канал управления точной установ0
кой угла поворота выполнен в виде сравнивающего узла и блока точного регулирования угла поворота, вход узла управления коммутаторами соединен с блоком задания движения, а его выходы - с входами кемму- таторов, соединяющих блоки шунтов с двумя обмотками статора, соединенными встречно-последовательно, один из входов сравнивающего узла соединен с блоком задания движения, второй вход соединен с датчиком положения ротора, а выход - с входом блока точного регулирования угла поворота, выход которого соединен с третб ей обмоткой статора.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Система автоматического управления трубогибочным станом | 1987 |
|
SU1505624A1 |
| Способ точной автоматической синхронизации синхронного двигателя, питаемого от преобразователя частоты с инвертором тока, с сетью переменного тока промышленной частоты | 1990 |
|
SU1744755A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2012 |
|
RU2520351C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА В ЭЛЕКТРОПРИВОДЕ С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2013 |
|
RU2541359C1 |
| Электропривод | 1980 |
|
SU1059647A2 |
| Способ регулирования углового положения ротора двигателя двойного питания | 1987 |
|
SU1524153A1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
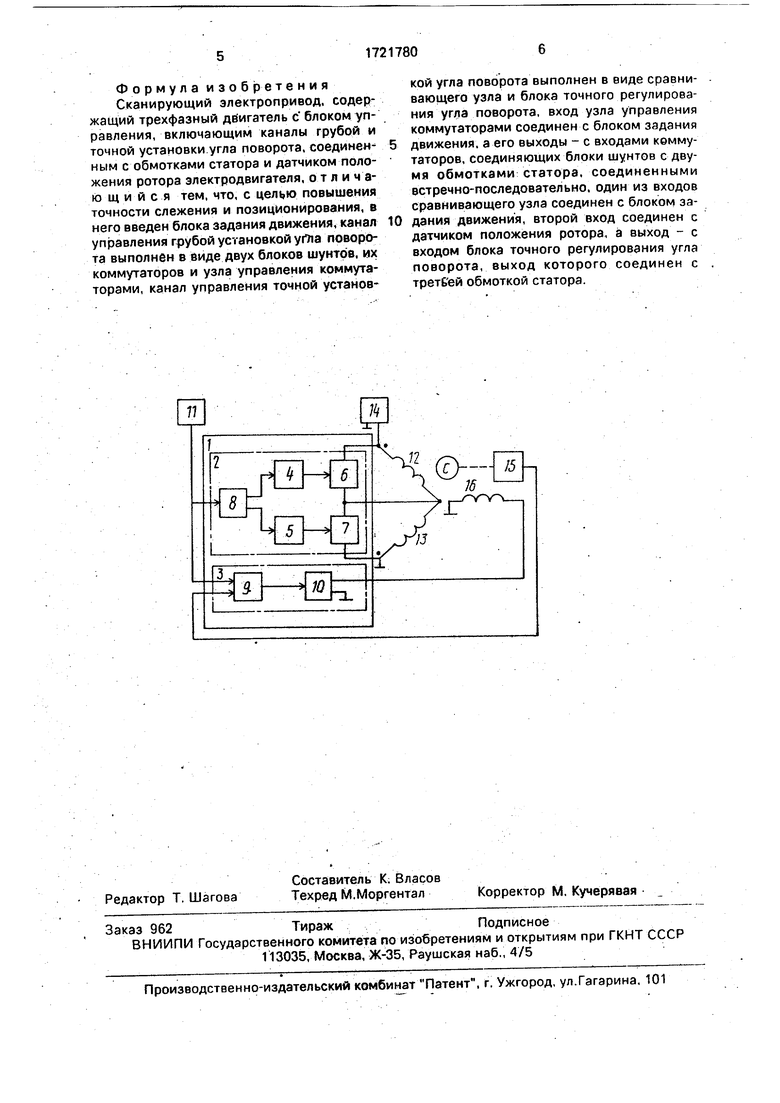
Изобретение относится к электротехнике, в частности к электроприводам колебательного движения. Цель изобретения - повышение точности слежения и позиционирования. Электропривод управления сканирующим электроприводом содержит блок управления 1 с каналами грубой 2 и точной 3 установки, соединенный с обмотками статора, блоком задания движения 11 и датчиком 15 положения ротора. Канал грубой установки включает в себя коммутаторы 4,5 блоков шунтов, блоки 6, 7 шунтов и узел 8 управления коммутаторами блоков шунтов, причем блоки 6, 7 шунтов соединяются с двумя обмотками 12, 13 статора, включенными встречно между собой и последовательно с источником постоянного напряжения; а третья обмотка 16 статора соединена с каналом 3 управления точной установкой, выполненного в виде сравнивающего узла, блока 10 точного регулирования и датчика 15 положения ротора. 1 ил.
| Устройство для управления двухфазным асинхронным двигателем в режиме колебательного движения | 1987 |
|
SU1453577A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления шаговым двигателем с дроблением шага | 1986 |
|
SU1403332A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
