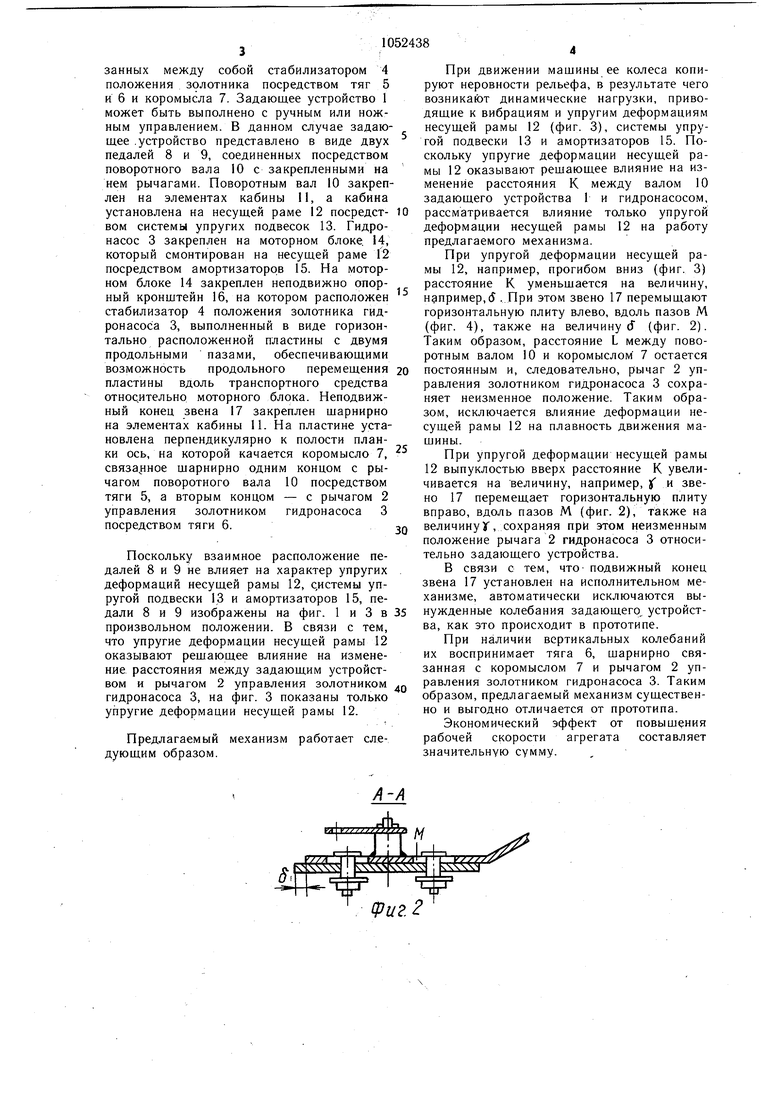
Изобретение относится к транспортному машиностроению и может быть использовано в качестве механизмов управления самоходными сельскохозяйственными и др. машинами. В современных самоходных сельхозмашинах широкое распространение получил гидростатический привод ходовой части, который обладает сушественными преимушествами перед механическим приводом. Управление гидростатическим приводом осушествляется гидрозолотником через механические системы управления. При этом скорость движения транспортного средства определяется расположением золотника в корпусе гидронасоса. Золотник управляется рычагом, установленным на корпусе гидронасоса. Известны и широко применяются различные механизмы управления гидроприводом ходовой части самох(5дных сельхозмашин. Например, такой механизм применяется на самоходном кормоуборочном комбайне КСК-100 1. Недостатком этого механизма является наличие жесткой связи между педалями управления и рычагом золотника гидронасоса. При движении комбайна неизбежны упругие деформации несушей рамы машины, амортизаторов кабины и системы упругой подвески моторной установки, на которой монтируется насос гидростатического привода ходовой части. Эти колебания через жесткие связи механизма управления передаются от задаюшего, например, двухнедельного механизма управления к золотнику гидронасоса. Все это вызывает качания рычага управления золотником гидронасоса, зависимые от упругих деформации рамы, что приводит к мгновенным изменениям производительности гидронасоса и, следовательно, к толчкообразным изменениям поступательной скорости движения машины. Недостаток усугубляется еще и тем, что зачастую кабина и моторная установка располагаются на значительном расстоянии друг от друга. Известен также механизм управления транспортным средством с рамой и моторным блоком, содержащий задающее устройство, связанное с поворотным валом, зaкpehлeнным в кабине, рычаг управления золотником гидронасоса, тягу и стабилизатор положения золотника 2. Недостатки этого механизма заключаются в TOMj что в прототипе подвиж.ный конец стабилизатора расположен на задающем устройстве. При горизонтальных колебаниях корпуса, установленного на шасси относительно пульта управления, расположенного в кабине при помощи виброизоляторов, стабилизирующий элемент перемещается вдоль паза, а рычаг удерживается при этом в заданном положении фрикционом, расположенным за рычагом. Это приводит к тому, что левый конец вала перемешается вдоль паза, а вал перекашивается относительно самоустанавливаюшегося подшипника. При этом рукоятка 7 имеет вынужденные колебания, обусловленные угловым перемешением вала, Для гашения вертикальных колебаний норпуса относительно пульта управления механизм практически не приспособлен. При компоновке прототипа с двухнедельным механизмом управления, получившим широкое распространение в самоходных сельхозмашинах, указанные выше недостатки усиливаются. Это обусловлено тем, что при движении машины оператор постоянно держит ногу на одной из двух педалей (в зависимости от направления движения машины вперед или назад), что приводит к вынужденной вибрации ноги оператора или к вынужденным качаниям рычага исполнительного устройства даже при относительно малых перемещениях подвижного конца стабилизатора. Целью изобретения является повышение эффективности и надежности механизма путем исключения влияния упругих деформаций и вибраций несуших элементов в го ризонтальнои и вертикальной плоскостях при неизменных положениях задаюшего устройства. Цель достигается тем, что в механизме управления транспортным средством с рамой и моторным блоком, содержащем задающее устройство, связанное с поворотным валом, закрепленным в кабине, рычаг управления золотником гидронасоса, тягу и стабилизатор положения золотника, стабилизатор положения золотника представляет собой горизонтально расположенную пластину, установленную на моторном блоке с возможностью перемещения и связанную с рамой транспортного средства посредсвом щарнирной продольной тяги, а указанный вал связан с рычагом управления золотником гидронасоса посредством двуплечего рычага и второй шарнирной тяги, при этом двуплечий рычаг установлен на вертикальной оси, расположенной неподвижно на пластине. На фиг. 1 изображен предлагаемый механизм в статистическом положении, общий вид; на фиг. 2 - сечение А-А на фиг. 1, подвижный конец жесткой связи в статистическом положении, продольный разрез; на фиг. 3 - предлагаемый механизм в работе при упругой деформации рамы (например, выпуклостью вниз); на фиг. 4 - сечение Б-Б на фиг. 3, продольный разрез подвижного конца жесткой связи при упругих деформациях рамы. Предлагаемый механизм (фиг. 1) состоит из задающего устройства 1, рычага 2 управления золотником гидронасоса 3, связанных между собой стабилизатором 4 положения золотника посредством тяг 5 и 6 и коромысла 7. Задающее устройство 1 может быть выполнено с ручным или ножным управлением. В данном случае задающее .устройство представлено в виде двух педалей 8 и 9, соединенных посредством поворотного вала 10 с закрепленными на нем рычагами. Поворотным вал 10 закреплен на элементах кабины И, а кабина установлена на несущей раме 12 посредством системы упругих подвесок 13. Гидронасос 3 закреплен на моторном блоке. 14, который смонтирован на несущей раме 12 посредством амортизаторов 15. На моторном блоке 14 закреплен неподвижно опорный кронштейн 16, на котором расположен стабилизатор 4 положения золотника гидронасоса 3, выполненный в виде горизон тально расположенной пластины с двумя продольными пазами, обеспечивающими возможность продольного перемещения пластины вдоль транспортного средства относительно моторного блока. Неподвижный конец звена 17 закреплен щарнирно на элементах кабины 11. На пластине установлена перпендикулярно к полости планки ось, на которой качается коромысло 7, связа|1ное щарнирно одним концом с рычагом поворотного вала 10 посредством тяги 5, а вторым концом - с рычагом 2 управления золотником гидронасоса 3 посредством тяги 6.
Поскольку взаимное расположение педалей 8 и 9 не влияет на характер упругих деформаций несущей рамы 12, с.истемы упругой подвески 13 и амортизаторов 15, педали 8 и 9 изображены на фиг. 1 и 3 в произвольном положении. В связи с тем, что упругие деформации несущей рамы 12 оказывают решающее влияние на изменение расстояния между задающим устройством и рычагом 2 управления золотником гидронасоса 3, на фиг. 3 показаны только упругие деформации несущей рамы 12.
Предлагаемый механизм работает следующим образом.
При движении мащины ее колеса копируют неровности рельефа, в результате чего возникают динамические нагрузки, приводящие к вибрациям и упругим деформациям несущей рамы 12 (фиг. 3), системы упругой подвески 13 и амортизаторов 15. Поскольку упругие деформации несущей рамы 12 оказывают решающее влияние на изменение расстояния К между валом 10 задающего устройства 1 и гидронасосом, рассматривается влияние только упругой деформации несущей рамы 12 на работу предлагаемого механизма.
При упругой деформации несущей рамы 12, например, прогибом вниз (фиг. 3) расстояние К уменьшается на величину, например, d .При этом звено 17 перемыщают горизонтальную плиту влево, вдоль пазов М (фиг. 4), также на величину rf (фиг. 2). Таким образом, расстояние L между поворотным валом 10 и коромыслом 7 остается постоянным и, следовательно, рычаг 2 управления золотником гидронасоса 3 сохраняет неизменное положение. Таким образом, исключается влияние деформации несущей рамы 12 на плавность движения мащины.
При упругой деформации несущей рамы 12 выпуклостью вверх расстояние К увеличивается на величину, например, jf и звено 17 перемещает горизонтальную плиту вправо, вдоль пазов М (фиг. 2), также на величину), сохраняя при этом неизменным положение рычага 2 гидронасоса 3 относительно задающего устройства.
В связи с тем, что подвижный конец звена 17 установлен на исполнительном механизме, автоматически исключаются вынужденные колебания задающего, устройства, как это происходит в прототипе.
При наличии вертикальных колебаний их воспринимает тяга 6, шарнирно связанная с коромыслом 7 и рычагом 2 управления золотником гидронасоса 3. Таким образом, предлагаемый механизм существенно и выгодно отличается от прототипа.
Экономический эффект от повышения рабочей скорости агрегата составляет значительную сумму.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходная машина | 1983 |
|
SU1404379A1 |
| Навесное к трактору устройство для подбора и погрузки тюков | 1978 |
|
SU701579A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Самоходная машина | 1987 |
|
SU1731657A1 |
| Устройство управления транспортным средством | 1980 |
|
SU929470A1 |
| Транспортное средство Исина | 1985 |
|
SU1294646A1 |
| НЕЗАВИСИМАЯ ПОДВЕСКА ЛЕГКОВОГО АВТОМОБИЛЯ | 2011 |
|
RU2466033C1 |
| Система управления транспортным средством | 1983 |
|
SU1113293A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| СНЕГОХОД | 2010 |
|
RU2445226C1 |

МЕХАНИЗМ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ с рамой и моторным блоком, содержащий задающее устройство, связанное с поворотным валом, закрепленным в кабине,- рычаг управления золотником гидронасоса, тягу и стабилизатор положения золотника, отличающийся тем, что, с целью повышения эффективности и надежности механизма путем исключения влияния упругих деформаций и вибраций несущих элементов в горизонтальной и вертикальной плоскостях при неизменных положениях задающего устройства, стабилизатор положения золотника представляет собой горизонтально расположенную пластину, установленную на моторном блоке с возможностью перемещения и связанную с рамой транспортного средства посредством шарнирной продольной тйги, а указанный вал связан с рычагом управления золотником гидронасоса посредством двуплечего рычага и второй шарнирной тяги, при этом двуплечий рычаг установлен на вертикальной оси, расположенной неподвижно с на пластине. (Л СП to 4 САЭ 00
П1,,
ssfe вд sssj
« J II- ) I
М
. , . Z-fff.ff
U2.2 фиг. 3 U2. Ч
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 3858456, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
