У1 ;л
:зь эо эо
Изобретение относится к расфасовочно-упаковочному оборудованию и может быть использовано в пищевой, строительной и других отраслях народного хозяйства.
Известно устройство для захвата 5 мешков из стопы, содержащее вакуумзахваты и приспособление для поднятия мешков из стопы и передачи их к вакуум-захватам ij .
Однако данное устройство сложно 10 по конструкции.
Известно устройство для захвата мешков из стопы, содержащее шарнррно. укрепленные вакуумные захваты и механизм их привода 2J .15
Однако известное устройство не обеспечивает подачи мешков к патрубг ку наполнительHEiK машин. - , .
Целью изобретения является расширение текнилогических возможностей jft устройства путем обеспечения подачи мешков к патрубку наполнительных машин.
Поставленная цель- достигается тем, что в устройстве для захвата мешков «в из. стопы, содержащем шарнирно укрепленные вакуумные захваты и механизм их привода, механизм привода вакуумных захватов состоит из горизонтального вала с укрепленными на нем ку- i лачками, расположеннойнад валом плиты с отверстиями, размещенных в последних стержней, нижние концы которых установлены с ;возможностью взаимодействия с кулачками вала, а . верхний конец среднего стержня соединен с плитой, укрепленных на пли«те Кронштейнов и смонтированных в них приспособлений для поворота вакуумнь1Х захватов, одно из которых представляет собой цепную передачу, 40 звездочка которой соединена с крайним стержнем, а другое выполнено в звиде шарнирного параллелограмма, рычаг которого одним концом шарнирно соединен с вакуум-захватом, а другим-45 со свободным крайним стержнем.
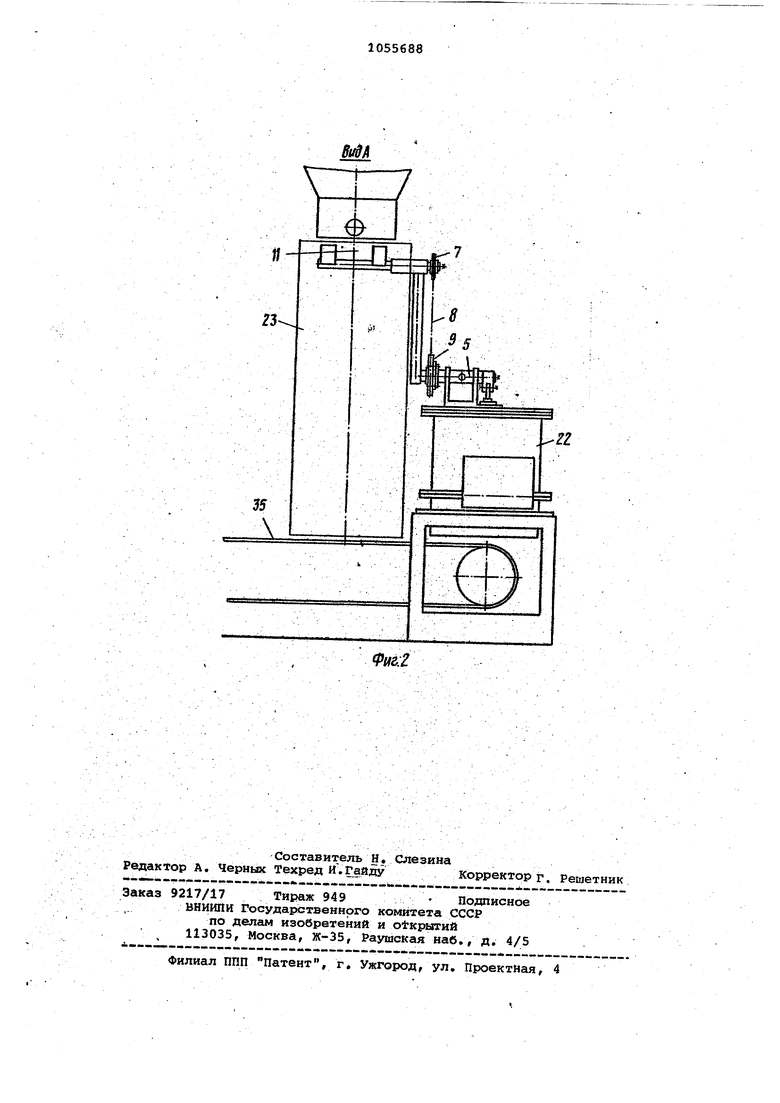
На фиг. 1 схематично Изображено стройство для захвата мешков из стопы на фиг. 2 - вид А на фиг, 1, .
Устройство содержит вакуумные «О захваты 1 и 2, закрепленные-с возможностью поворота на рьгчагах 3 и 4, оторые выполнены из труб. Рычаги 3 и 4 установлены шарнирно-в кронштейнах 5 и б,Захват 1 содержит звездоч- , у 7, которая посредством цепи 8 свяана со звездочкой 9, жестко прирепленной к кронштейну 5. Захват 2 вязан с осью рычага 4 посредством арнирцрго параллелограмма 10, в коором рычаг 4 является одной из его торон. Захваты 1 и 2 выполнены с вырезом 11. Рычаги 3 и 4 содержат естко прикрепленные к ним планки 12 13 с Ёырезами 14 и 15. Кронштейны и б прикреплены к подъемной плите 65
16, в которую входят стержни 17 и18. Стержни 17 и 18 содержат штифты 19 и 2.0, которые входят в вырезы 14 и 15 планок 12 и 13. К плите 16 прикрепле стержень 21. Плита 16 установлена на корпусе 22 в направляющих.
Рычаги 3 и 4 подпружинены так, чтобы захваты 1 и 2 в исходном положении были расположены на расстоянии раскрьггого мешка 23.
Внутри корпуса 22 установлен вал 24 с кулачками 25 - 27, контактирующими со стержнями 17, 21 и 18.
Вал 24 соединен поЬредством муфты 28 с приводом 29, а также соединен с распределителем 30. Распределитель 30 соединен с вакуумной системой и с захватами 1 и 2 через полые рычаги 3 и 4 посредством гибких шлангов 31.
Мешки 23 уложены в плоском состоянии впускной частью перпендикулярно осям вращения захватов 1 и 2 на устройстве 32 для автоматического подъема стопы.
. Над захватами 1 и 2 расположен., патрубок 33 загрузочной машины, который содержит зажимы 34.
Над захватами расположен отводящий конвейер 35.
УСТ1ЮЙСТВО работает следующим образом.
Мешки 23 уложены в плоском состоянии в стапель, причем впускная част мешка 23 направлена в сторону патрубка 33. При включении привода 29 вращается вал 24 с жестко закрепленными на нем кулачками 25 - 27. Кулачок 25 поднимает стержень 17 вверх, при этом .рычаг 3 поворачивается к стапелю мешков 23. Захват 1 посредством звездочки 7, соединенной цепью 8 со звездочкой 9, жестко закрепленной на оси рычага 3, поворачивается в лротивоположную сторону и в крайнем полойсении повернутого рьгчага 3 расположен горизонтально и параллельно кромке впускной части мешка 23. При подходе захвата 1 к мешку 23 распределитель 30 подключает захват 1 к вакуумной системе, 3aJtBaT 1, коснувшись мешка 23, прихватывает его, и в этот момент рычаг 3 под действием пружишл. начинает возвращаться вместе с мешком 23 в исходное вертикальное положение,
Одновременно под действием кулачка 27 начинает подниматься стержень 18 и поворачивать рычаг 4 навстречу рычагу 3.
В тот 4oмeнт, когда рычаг 3 становится вертикально к захвату 1, подходит захват 2, уже подключенный распределителем 30к вакуумной системе. Мешок 23 прихватьшается противоположной своей стенкой к захвату 2. Рычаг 4 под действием пружины возвращается в исходное положение, мешок 23 при этом раскрывается.
Когда захват 2 возвращается в исходное положение, под действием кулачка 26 через стержень 21 поднимается подъемная плита 16, а вместе с ней и захваты 1 и 2 с раскрытым мешком 23, Мешок 23 одевается на патрубок ЗЭ и сразу же прижимается к нему захватами 3i4, а плита 16 опускается вниз, при этом захваты 1 и 2 уже отключены от вакуумной системы, а мешок 23 начинает заполняться сыпучим продуктом.
В тот момент, когда плита 16 опустится вниз л начинает поворачиваться рычаг 3 с захватом 1 за следующим
пустым мешком, а заполненный мешок 23 освобождается от зажимов 34 и отводйтся конвейером 35.
Далее операции по взятию, раскрытию и одеванию, а также заполнению мешка 23 повторяются.
Автоматическое устройство 32 для подъема стапеля обеспечивает положение верхнего плрскосложенного мешка
0 на постоянном уровне.
Данное устройство обеспечивает не только захват меиков из стопы, но подачу их к патрубку исполнительных машин.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РАСКРЫТИЯ И НАДЕВАНИЯ МЕШКОВ НА ЗАГРУЗОЧНЫЙ ПАТРУБОК | 1991 |
|
RU2050308C1 |
| Устройство для захвата и подъема заполненных мешков | 1978 |
|
SU900800A4 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАСКРЫТИЯ, УДЕРЖАНИЯ И ЗАКРЫТИЯ МЕШКОВ | 2011 |
|
RU2469928C1 |
| Аппарат для пневматического выворачивания мешков | 1935 |
|
SU51048A1 |
| Устройство для открывания клапанных мешков и надевания их на патрубки расфасовочных машин | 1985 |
|
SU1323469A1 |
| Устройство для упаковки сыпучего материала в клапанные мешки | 1982 |
|
SU1113308A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1986 |
|
SU1395406A1 |
| Устройство для раскрывания клапанных мешков | 1975 |
|
SU579890A3 |
| УСТРОЙСТВО ДЛЯ НАВЕШИВАНИЯ МЕШКОВ ДЛЯ ЗАСЫПКИ СЫПУЧИХ ПРОДУКТОВ С ПОШТУЧНЫМ ЗАХВАТОМ МЕШКОВ | 1992 |
|
RU2054364C1 |
| Манипулятор для загрузки конвейера мешковыми грузами | 1985 |
|
SU1316949A1 |
УСТРОЙСТВО ЗАХВАТА МЕШКОВ ИЗ СТОПЫ, содержащее шарнирно укрепленные выкуумные захваты и механизм их привода, отличающ е е с я тем, -что, с целью pactimpeния технолоДических возможностей устройства путем обеспечения подачи мешков к патрубку наполнительных ; машин, механизм привода вакуумных захватов состоит из горизонтального вала с укрепленными на нем кулачками, расположенной над валом плиты с отверстиями, размещенных в последних стержней, нижние концы KOTOJMJDC установлены с возможностью взаимодействия с кулачками вгша, а верхний конец среднего стержня соединен с плитой, укрепленных иа плите кронштейнов и смонтированных в них приспособлений для поворота вакуумных захватов, одно из которых представляет . собой цепную передачу, звездочка которой соединена с крайним стержнем, . а другое вькюлнено в виде шарнирного параллелограмма,рычаг которого концом шарнирно соединен с вакуум(Л захватом, а другим-СО свободным крайним стержнем. с
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для укладки цилиндрических изделий в упаковку | 1988 |
|
SU1576433A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| МЕХАНИЗМ ПРЕДВАРИТЕЛЬНОГО РАСКРЫТИЯ БЕСКЛАПАННЫХ МЕШКОВ | 1967 |
|
SU214381A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
