Изобретение относится к сельскохозяйственному машиностроению, в частности, к устрпйстнам для выгрузки кормов из транзчейных хранилищ.
Известен выгрузчик кормов из траншейных хранилищ, включающий отделяющий рабочий орган и устройство для его перемещения с системой автоматического управления fl J,
Известен также выгрузчик кормов из траншейных хранилищ, включагопр1й платформу с установленной на ней с возможностью возвратно-поступательного перемещения по ширине хранилища тележкой, снабженной подвижной в вертикальной плоскости кареткой, несущей отделяющий рабочий орган, и систему автоматического управления перемещением тележки и каретки с г концевыми датчиками С 2 3,
Однако при эксплуатации эти устройства -не обеспечивают выгрузку корма, находящегося в непосредственной близости от стен хранилища, располоконных под углом к вертикальной плоскости, что снижает их эксплуатационные качества.
Цель изобретения - более полное отделение корма от стен хранилища.
Указанная цель достигается тем, что концевые датчики системы автоматического управления жестко соединены с-кареткой и установлены над отделяюп(им рабочим органом.
При этом концевые датчики снабжены подпружиненными щупами и установлены симметрично относительно вертикальной плоскости симметрии отделяющего рабочего органа.
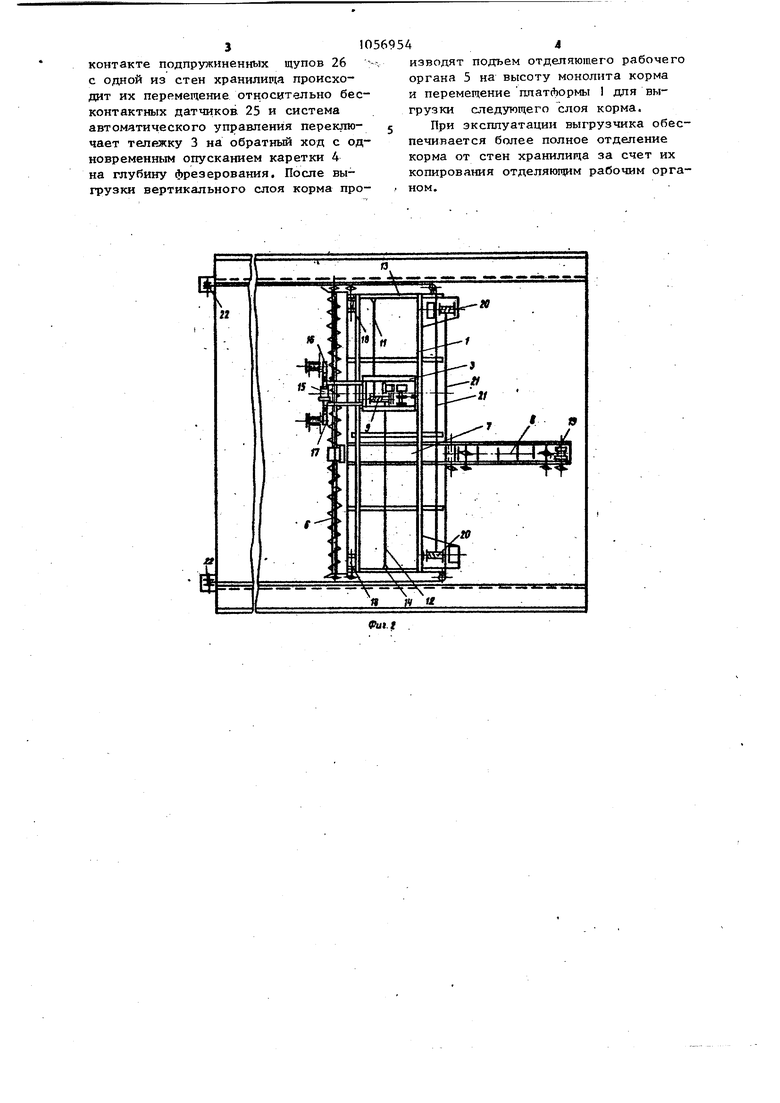
На (|иг, 1 изображен выгрузчик кормов из траншейных хранилищ, общий вид; на дтг. 2 - то же, вид в плане; на фиг. 3 - фрагмент отделяющего par бочего органа и концевых датчиков системы автоматического управления, вид, спереди.
Выгрузчик кормов из траншейных краншгищ состоит из платформы , опирающейся на пол хранилища при помощи колес 2, тележки 3 .с вертикаль.ными стойками, каретки 4, несухчей двухинековый отделяющий рабочий орган 5,. поперечного конвейера 6 и продольных конвейеров 7 и 8. На тележке 3 закреплены электролебедка 9 для обеспечения возвратно-поступательного перемещения тележки 3 по платформе 1 и электролебедка 10 для перемещения каретки 4 по вертикальным стойкам тележки 3 и фиксации ее во время работы на необходимом уровне. На барабан лебедки 9 намотаны канаты 11 и 12, свободные концы которых прикреплены соответственно к балкам 13 и 1Д платформы 1. Привод отделяющего рабочего органа Ь выполнен в виде электродвигателя 15 и редукторов 16 и 17. Поперечный конO вейер 6 выполнен ви1{товым и имеет два привода 18, каждый из которых состоит из мотора-редуктора и цепной передачи. Привод продольных конвейеров 7 и 8 осуществлётся от мотора-редуктора 19. Механизм продольного перемещения платформы 1 выполнен в виде двух электролебедок 20, закрепленных на платформе 1 и соединенных посредством гибких элементов 21 с анкерами 22. Система автоматического управления перемещением тележки 3 и каретки 4 содержит концевые датчики, ограничиваюп ие ход каретки 4 по вертикальным стойкам тележки 3 и состоящие из двух бесконтактных датчиков 23, закрепленных на одной из вертикальных стоек тележки 3, и 1чупа-ппастинь 24, закрепленной на каретке 4. Концевые датчики, служапще дпя реверсирования хода тележки 3 по платформе 1 и подачи команд на опускание каретки 4, состоят из бесконтактных датчиков 25 и подпружиненных щупов 26, взаимодействую1пгнх со стенами хранилища. 5 Эти датчики закреплены на кар.тке
4над отделяющим рабочим органом
5попарно относительно его вертикальной плоскости симметрии.
Выгрузчик кормов работает следующим образом.
Под действием электролебедок 10 и 20 отделяю1хий рабочий орган 5 устанавл:ивают над монолитом корма и последовательно включают приводы конвейеров 6, 7 и 8, а затем отделяющего рабочего органа 5. Под действи- . ем электролебедки 10 каретка 4 с отделяющим рабочим органом 5 опускается вниз до внедрения шнеков в мо0 нолит корма на глубину фрезерования, при этом шнеки рабочего органа 5 отделяют от монолита слой корма и сбрасывают его на винтовой конвейер 6. Винтовой конвейер 6 подает корм 5 на конвейеры 7 и 8, откуда он поступает в мобильные транспортные средства или на стационарную линию транспортирования и кормораздачи. При :
контакте подпружиненных щупов 26 ;с одной из стен хранилища происходит их перемещение относительно бесконтактных датчиков 25 и система автоматического управления переключает тележку 3 на обратный ход с одновременным опусканием каретки 4 на глубину фрезерования. После выгрузки вертикального слоя корма производят подъем отделяющего рабочего органа 5 на высоту монолита корма и перемещение платформы 1 для выгрузки следзгющего слоя корма.
При зксппуатации выгрузчика обеспечивается более полное отделение корма от стен хранилища за счет их копирования отделяющим рабочим органом.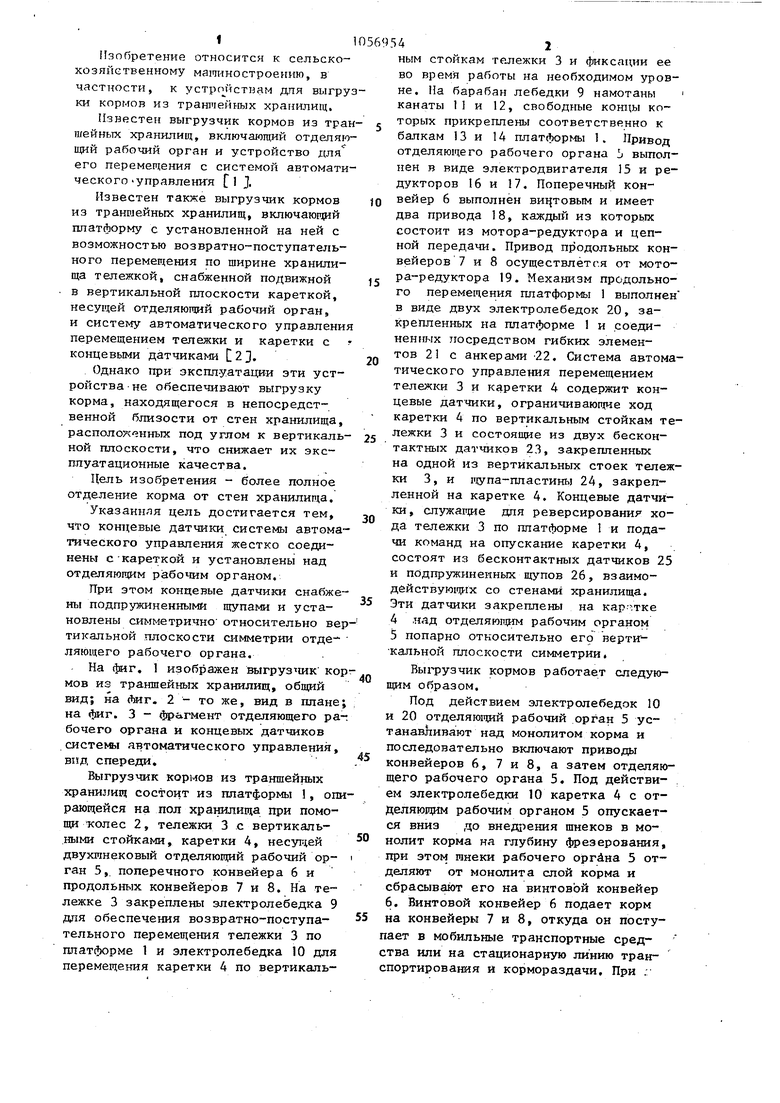
| название | год | авторы | номер документа |
|---|---|---|---|
| Выгрузчик силоса | 1989 |
|
SU1704682A1 |
| Отделяюще-рыхлящий орган выгрузчика корма из траншей | 1982 |
|
SU1103820A1 |
| ЗАГРУЗЧИК-ВЫГРУЗЧИК СТЕБЕЛЬНЫХ КОРМОВ ДЛЯ ГОРИЗОНТАЛЬНЫХ СИЛОСНО-СЕНАЖНЫХ ХРАНИЛИЩ | 2007 |
|
RU2356213C2 |
| Устройство для разгрузки башенных хранилищ кормов | 1989 |
|
SU1676505A1 |
| Рабочий орган выгрузчика корма изХРАНилищ | 1979 |
|
SU843847A1 |
| Выгрузчик стебельчатых кормов из башенных хранилищ | 1986 |
|
SU1400545A1 |
| Выгрузчик силоса из башенных хранилищ | 1990 |
|
SU1752268A1 |
| Распределитель-выгрузчик стебельчатых кормов для башенных хранилищ | 1986 |
|
SU1464959A1 |
| Выгрузчик кормов из башенных хранилищ | 1982 |
|
SU1064907A1 |
| Погрузчик кормов | 1989 |
|
SU1715236A1 |

1. ВЫГРУЗЧИК КОРМОВ ИЗ ТРАНШЕЙНЫХ ХРАНИЛИЩ, включаюш 1й шСатАорму с установленной на ней с возможностью воявраТно-поступательного перемещения по ширине хранилища тележкой, снабженной подвижной в вертикальной плоскости кареткой, несущей отделяющий рабочий орган, и систему автоматического управления перемещением тележки и каретки с концевыми датчиками, отличающийся тем, что, с целью более полного отделения корма от стен хранилища, концевые датчики сист.е1Ф1 автоматическо, го управления жестко соединены с кареткой и установлены под отделяющим рабочим органом. 2. Выгрузчик по п. 1, о т л и i чающийся тем, что концевые датчики снабжены подпружиненными (Л пами и установлены симметрично относительно вертикальной плоскости симметрии, отделяющего .рабочего органа. о ел СГ5 СО ел Jiik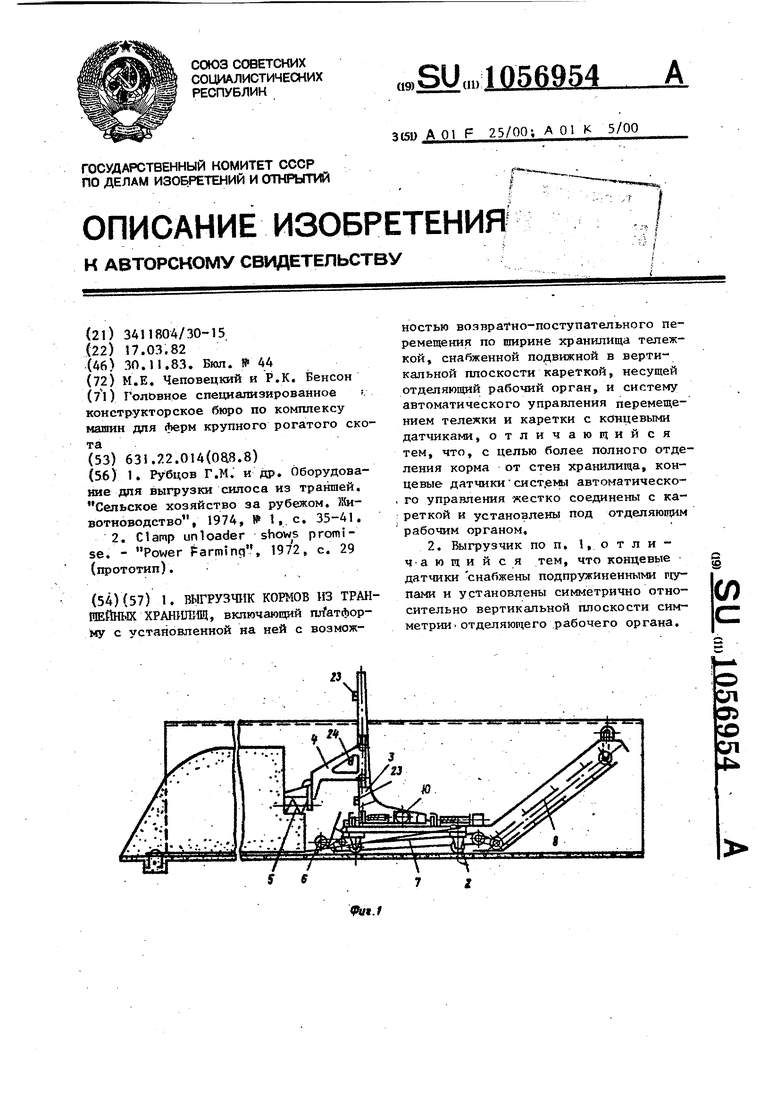
26
(puz. 3
25
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Рубцов Г.М, и др | |||
| Оборудование для выгрузки силоса из траншей | |||
| Сельское хозяйство за рубежом | |||
| }Хивотноводство, 1974, № 1, | |||
| с | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Clamp unloader shows promise | |||
| - Power Farming, 1972, c | |||
| Солесос | 1922 |
|
SU29A1 |
