1
Изобретение относится к обла-сти машиностроения, в частности двигателестроения, а именно к системе дистанционного управления двигателя внутреннего сгорания.
Известны системы дистанционного управления для двигателя внутреннего сгорания, содержащие задатчик с логическим блоком управления, связанным двумя каналами с преобразователем, подключенным к сервомеханизму органа управления оборотами, соединенного при помощи датчика положения с логическим блоком 1.
Недостатками этой системы является то, что переключения режимов двигателя и передачи осуществляет (Уп&ратор, а конструкция зстройства не исключает возможности переключения на неоптимальных значениях числа оборотов н соответственно, перегрузки узлов.
С целью повышения надежности, предлагаемая система снабжена двумя парами последовательно установленных логических элементов «И и «ИЛИ, включенных соответственно в каналы связи логического блока и преобразователя и связанных с датчиком положения.
Датчик может быть выполнен в виде кулачкового механизма и взаимодействующего с ним переключателя.
2
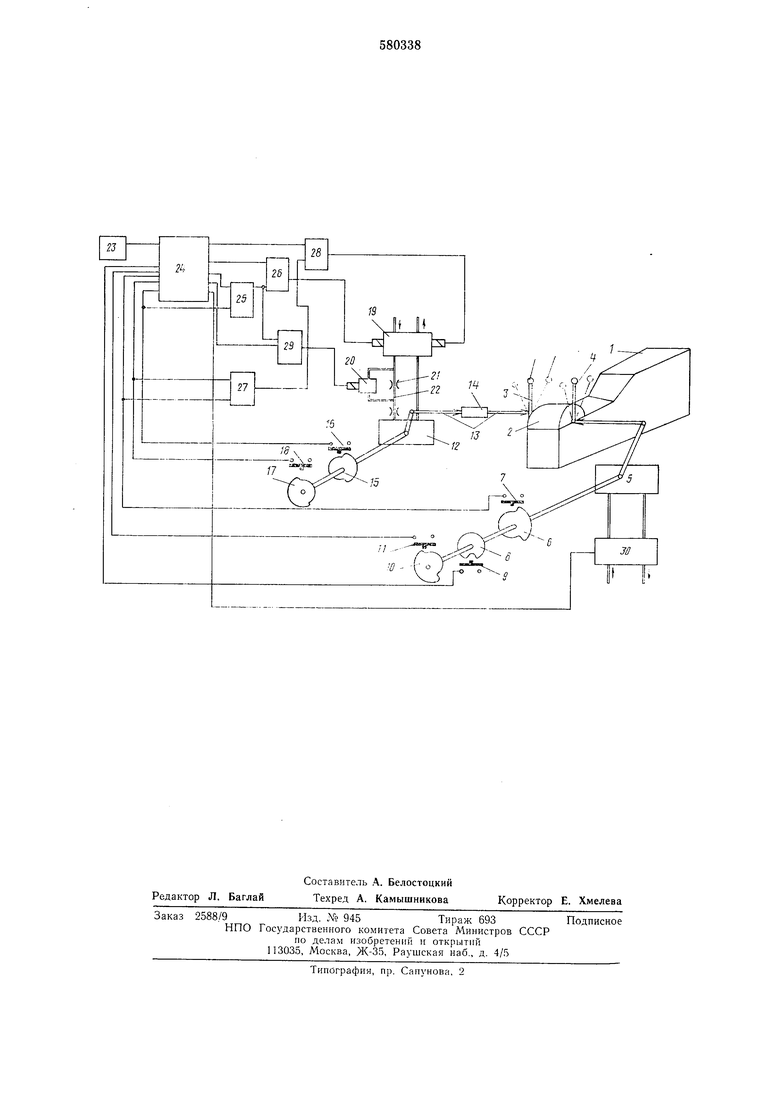
На чертеже представлена схема предлагаемого устройства.
Двигатель 1 снабл-;ен местным постом }Правления 2 с органом 3 управления оборотами и органом 4 управления переключением реверс - муфты.
С органом 4 кинематически соединен сервомеханизм 5, выходной валик которого снабжен кулачковым механизмом, содержащим
кулачок 6, взаимодействующий в положении «Вперед («В) с переключателем 7, кулачОК 8-в положении «Холостой ход («XX) с переключателем 9 и кулачок 10-в положении «Назад («Н) с переключателем 11.
С органом 3 соединен сервомеханизм 12 при помощи кинематической связи 13, снабженной унругим звеном переменной длины 14. Сервомеханизм 12 снабжен датчиком положения, выполненным в виде кулачкового механизма, взаимодействующего в положении «Пуск («Упор реверсирования) с переключателями (кулачок 15 с переключателем 16 и 17-с переключателем 18).
Сервомеханизм 12 подключен гидравлическими каналами «Б (больще) и «М (мень ше) к преобразователям 19 и 20.
Для регулирования скорости отработки сервомеханизма 12 в одном из гндравлическнх каналов встроены дроссели 21 и 22.
Задатчик 23 подключен к преобразователям зон помощи логического блока управления 24, связанного двумя каналами (больше и меньше) с преобразователем 19 и одним началом-с преобразователем 20.
В каналы связи логического блока 24 с преобразооателем 19 включены две пары последовательно установленных логических элементов «PI, и «ИЛИ («И 25 и «ИЛИ 26 в канал «М, «И 27, «ИЛИ 28 в канал «Б соответственно).
В канал связи логического блока 24 с преобразователем 20 включены логические элементы «И 25 и «ИЛИ 29.
Датчик положения сервомеханизма 12 связан с логическим блоком управления 24.
Сервомеханизм 5 подключен гидравлическими каналами к блоку 30 преобразователей, связанному с логическим блоком 24.
Система работает следующим образом.
При получении команды от задатчика 23, логический блок 24 преобразует ее в сигналы для блока 30 преобразователей и преобразователей 19 и 20. При помощи блока 30 преобразователей, соединенного гидравлическими каналами с сервомеханизмом 5, последний устанавливает орган 4 местного поста 2 двигателя 1 в одно из положений («П, «XX или «В).
В положении «В разрешается управление органом 3 управления оборотами.
При пол.аче от задатчика 23 через логический блок 24 и «ИЛИ 28 сигнала по каналу «Б на нреобразователь 19, последний подает рабочую жидкость в сервомеханизм 12, переменная его выходной орган и через кинематическу о связь 13 - орган 3 местного поста 2 двигателя 1 на увеличение числа оборотов. При подаче сигнала через блок 24 и «ИЛИ 26 по каналу «М па преобразователь 19, орган 3 неремещается на уменьшение числа оборотов.
При плавном уменьшении числа оборотов двигателя (сигнал на преобразователь 20 не поступает от блока 24 и рабочая жидкость в сервомеханизм 12 поступает через два дросселя 21 и 22), прекращение перемещения органа 3 в точке «Пуск («упор реверсирования) достигается при опускании переключателей 16 и 18, взаимодействующих в этой точкр с кулачками 15 и 17 соответственно.
Поскольку взаимная фиксация органов 3 и 4 местного поста 2 жесткая, при петочной остановке сервомеханизма 12 может произойти заклинивание блокировочного механизма по(та 2 или повышенные механические напряжения в сервомеханизме 12, кинематической связи 13 или посту 2.
Для исключения этого, в кинематической связи предусмотрено упругое звено переменной длины 14. Оно позволяет изменять длину кинематической овязи 13, не создавая нагрузок на пост 2 или сервомеханизм 12.
При быстром уменьшении числа оборотов двигателя (сигнал на преобразователь 20 поступает от блока 24 через «И 25 только при нажатом переключателе 16, рабочая жидкость подается в механизм через один дроссель 22, а дроссель 21 шунтируется открытым преобразователем 20) возможен излишний
выбег серво-мехализма 12, при этом устанавливаются малые обороты двигателя, при которых двигатель при реверсировании может заглохнуть. Во избежание этого, при замыкании выключателя 18, подается сигнал через «И 27, при наличии на его втором входе сигнала от выключателя 7 «Б, через «ИЛИ 28 по каналу «Б на преобразователь 19. Сигнал с преобразователя 20 при этом снимается и
происходит медленное увеличение числа оборотов до момента размыкания переключателя 18.
Предложенная система позволяет существенно облегчить работу оператора и повысить
надежность работы системы управления.
Форм}ла изобретения
1.Система дистанционного управления для двигателя внутреннего сгорания, содержащая
задатчик с логическим блоком управления, связанным двумя каналами с преобразователем, подключенным к сервомеханизму органа управления оборотами, соединенного при
помощи датчика положения с логическим блоком, отличающаяся тем, что, с целью повышения надежности, система снабжена двумя парами последовательно установленных логических элементов «И и
«ИЛИ, включенных соответственно в каналы связи логического блока и преобразователя и связанных с датчиком положения.
2.Система по п. 1, отличающаяся тем, что датчик выполнен в виде кулачкового механизма и взаимодействующего с ним переключателя.
Источники информации, принятые во внимание при экспертизе
1- Авторское свидетельство № 198830, кл. F 02D 1/112, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления для двигателя внутреннего сгорания | 1980 |
|
SU889880A2 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1979 |
|
SU855238A2 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Устройство для дистанционного управлениядВигАТЕлЕМ C PEBEPC-РЕдуКТОРНОй пЕРЕдАчЕй | 1978 |
|
SU838663A1 |
| Силовая установка | 1979 |
|
SU802573A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ С РЕВЕРС-РЕДУКТОРНОЙ ПЕРЕДАЧЕЙ | 2003 |
|
RU2262609C2 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| Устройство для дистанционного управления многомашинным агрегатом | 1978 |
|
SU748348A1 |