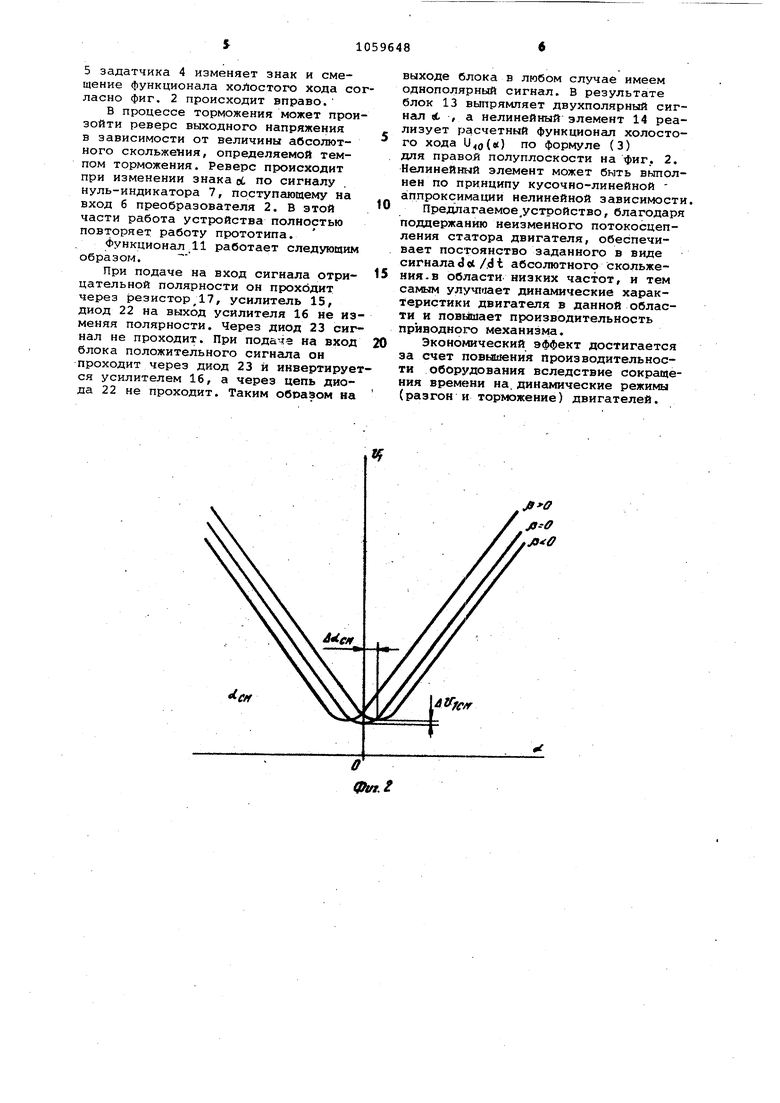
t-4)7 HF фш. f S, Изобретение относится к электротехнике, может быть использовано в частотно-регулируемом электроприводе, выполненном на основе тиристорного преобразователя частоты и асинхронного двигателя с короткозам кнутым ротором. По основному авт.св. № 845255 известно устройство для частотного управления асинхронным двигателем, подключенным к. преобразователю частоты. Устройство содержит задатчик интенсивности, блок сметания и бло суммирования, один вход которого по ключен к выходу задатчика интенсивности, а выход - к блоку управления частотой преобразователя, второй вход блока суммирования подключен к выходу блока с ещения, блок смещения выполнен в виде блока дефференцирования, а его вход подключен к выходу задатчика интенсивности. Кроме того, в устройство введен нуль-индикатор, подключенный входом к выходу блока суммирования, а выходом - к входу блока управления порядком чередования фаз выходного напряжения преобразователя частоты 1 .. Недостатком устройства является низкие динамические характеристики двигателя на малых частотах, которы обусловлены тем, что в устройстве не предусмотрена компенсация падения напряжения на активных сопротив лениях обмотки статора и амплитуда напряжения регулируется пропорционально частоте во всем рабочем диапазоне. В результате в динамических режимах (разгонах и торможениях) асинхронный двигатель не развивает достаточного момента на низких частотак, что приводит к задержке начала фактического разгона и остановке двигателя после частотного тормо жения VS к низкой производительности приводного механизма. Цель изобретения - улучшение динамически) характеристик асинхронного двигателя на низких частотах и повыи ение производительности приводного механизма.. Поставленная цель достигается тем, что в устро1Яство для частотного управления асинхронным двигателе введен потенциометр, дополнительный блок суммирования и блок функционала, состоящий из последователь но соединенных блока выделения моду и .нелинейного элемента, причем выход блока функционала подключен к входу управления амплитудой напряжения преобразователя частоты, вход блока функционала подключен к выход дополнит ьного блока суммирования, первый вход которого подсоединен к входу блока управления частотой пре образовс1теля, а второй вход через потенциометр подсоединен к входу блока суммирования. На фкг. 1 приведена схема устройства для частотного управления асинхронным двигателем; на фиг. 2 - гоафики зависимости амплитуды напряжения от частоты для постоянства потокосцепления статора и изменении нагрузки двигателя; на фиг. 3 вариант выполнения функционсша. Устройство содержит асинхронный двигатель 1 с короткозамкнутым ротором повыленного сопротивления, который подключен к выходу преобразователя 2 частоты с системой управления. Блок 3 суммирования подключен к выходу задатчика 4 интенсивности, имеющему выход 5. Выход блока 3 суммирования подключен к входу блока б управления порядком следования фаз преобразователя 2 через нуль-индикатор 7 и к вхолУ 8 блока 2 управления частотой преобразователя частоты. К выходу 5 защатчика интенсивности 4 подключен потенциометр 9, выход которого подключен к входу дополнительного блока 10 суммирования, второй вход которого подключен к выходу блока 3 суммирования. Выход блока 10 подключен через блок 11 функционала к входу 12 управления аКшлйтудой напряжения преобразователя 2 частоты. Блок 11 функционала состоит из блока 13 выделения модуля сигнала и нелинейного элемента 14 (фиг. 3). Один из возможных вариантов исполнения блока 13 (фиг. З) состоит из двух операционных усилителей 15 и 16, резисторов 17-21 и диодов :22 и 23. Такое построение устройства диктуется следующим соображениями. Вы сокая эффективность работы асинхронного двигателя на низких частотах обеспечивается в режиме постоянства потокосцепления статора ( Const, которое достигается за счет компенсации падения напряжения на активных сопротивлениях обмотки статора . Амплитуда напряжения на зажимах статора в фукнкции частоты oi и абсолютного сколь.жения двигателя ft для линейной области механической характеристики, где собственно и происходит работа двигателя, описывается выражением .|(5 HMfM гдеХо,Х(,2 - параметры схемы замещения
J
- приведенное сопротивление
р. вторичной обмотки.
В режиме идеального холостого хода ( р 0)
jflv U77
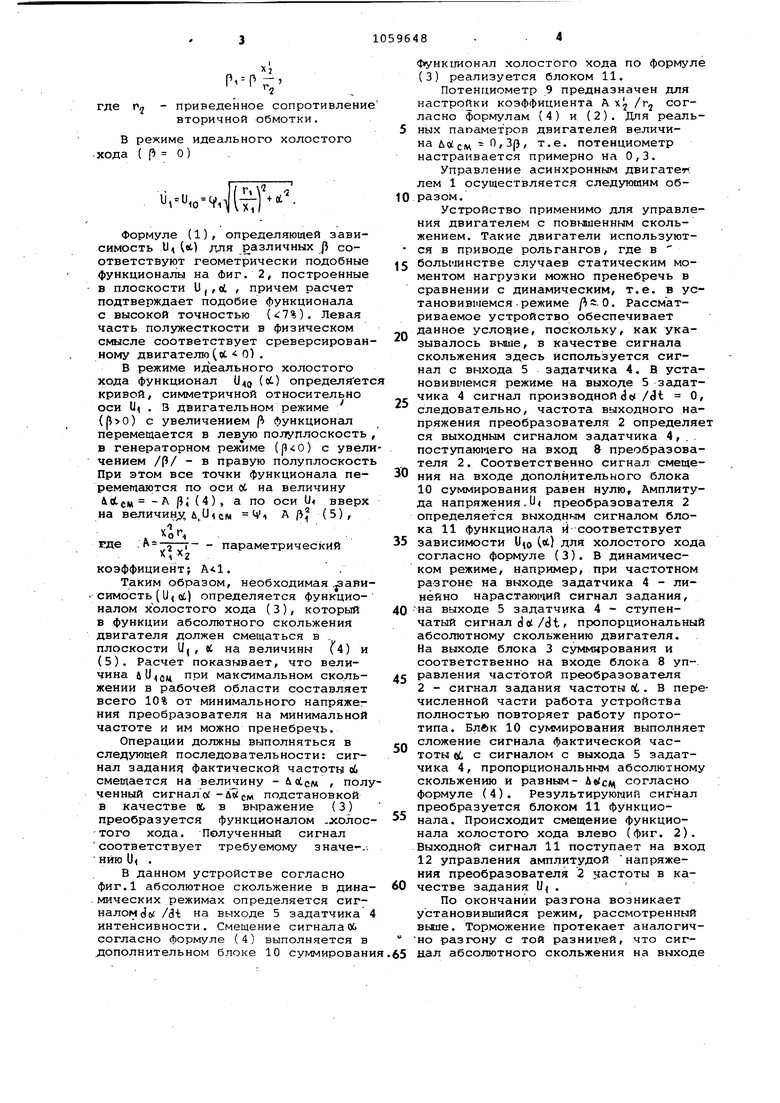
Формуле (1), определяющей зависимость Uv(«t) для различных J) соответствуют геометрически подобные функционалы на фиг. 2, построенные в плоскости и, , oi, , причем расчет подтверждает подобие функционала с высокой точностью (;7%). Левая часть полужесткости в физическом смысле соответствует среверсированному двигателю(л 0).
В режиме идеального холостого хода функционал (1цд (оС) определяет кривой, симметричной относительно оси U . В двигательном режиме () с увеличением / функционал перемещается в полуплоскость в генераторном режиме () с увелчением /р/ - в правую полуплоскост При этом все точки функционала переметаются по оси об на величину ч-см- ) по оси UH вверх на величину; л,и 1CN 1 А /i (5),
А of Еде - параметрический
Х.,Х2
коэффициент; .
Таким образом, необходимая ависимость (и оС) определяется функционалом холостого хода (3), который в функции абсолютного скольжения двигателя должен смещаться в . плоскости L/( , ее на величины f4) и (5), Расчет показывает, что величина йи4ад при максимальном скольжении в рабочей области составляет всего 10% от минимального напряжения преобразователя на минимальной частоте и им можно пренебречь.
Операции должны выполняться в следующей последовательности: сигнал задания фактической частоты об смещается на величину - Лобсм , полченный сигнал ог -ДЫсм подстановкой в качестве к, в выражение (3) преобразуется функционалом .холостого хода. Полученный сигнал соответствует требуемому значе-.. нйю и .
В данном устройстве согласно фиг.1 абсолютное скольжение в динамических режимах определяется сигналом jei /di на выходе 5 задатчика интенсивности. Смещение сигнала (Л согласно формуле (4) выполняется в дополнительном блоке 10 суг 1мирован
Функционал холостого хода по формуле (3) реализуется блоком 11.
Потенциометр 9 предназначен для настройки коэффициента А х /г согласно формулам (4) и (2). Для реальных папаметров двигателей величина й1У(.| О, Зр, т.е. потенциометр настраивается примерно на 0,3.
Управление асинхронным двигате лем 1 осуществляется следующим об0разом.
Устройство применимо для управления двигателем с повышенным скольжением. Такие двигатели используются в приводе рольгангов, где в болыпинстве случаев статическим моментом нагрузки можно пренебречь в сравнении с динамическим, т.е. в установившемся .режиме /, 0. Рассматриваемое устройство обеспечивает данное условие, поскольку, как указывалось выше, в качестве сигнала скольжения здесь используется сигнал с выхода 5 задатчика 4. В установившемся режиме на выходе 5 задатчика 4 сигнал производной dc О, следовательно, частота выходного напряжения преобразователя 2 определяет ся выходным сигналом задатчика 4, , . поступающего на вход & преобразователя 2. Соответственно сигнал смещения на входе дополнительного блока 10 суммирования равен нулю. Амплитуда напряжения.U преобразователя 2 определяется выходным сигналом блока 11 функционала й-соответствует зависимости Ujo С) для холостого хода согласно формуле (3). В динамическом режиме, например, при частотном разгоне на выходе задатчика 4 - линейно нарастающий сигнал задания, на выходе 5 задатчика 4 - ступенчатый сигнал d г пропорциональный абсолютному скольжению двигателя. На выходе блока 3 суммирования и соответственно на входе блока 8 уп-. равления частотой преобразователя 2 - сигнал задания частоты uL . В перечисленной части работа устройства полностью повторяет работу прототипа, Влв)к 10 суммирования выполняет сложение сигнала фактической частоты oi, с сигналом с выхода 5 задатчика 4, пропорциональным абсолютному скольжению и равным- htlcn согласно формуле (4). Результирующий сигнал преобразуется блоком 11 функционала. Происходит смещение функционала холостого хода влево (фиг. 2). Выходной сигнал 11 поступает на вход 12 управления амплитудой напряжения преобразователя 2 }1астоты в качестве задания И .
По окончании разгона возникает установившийся режим, рассмотренный ВЕлие. Торможение протекает аналогич но разгону с той разниией, что сигнал абсолютного скольжения на выходе 5 эадатчика 4 изменяет знак и смещение функционала холостого хода со ласно фиг. 2 происходит вправо. В процессе торможения может прои зойти реверс выходного напряжения в зависимости от величины абсолютного скольжения, определяемой темпом торможения. Реверс происходит при изменении знака сб по сигналу нуль-индикатора 7, поступающему на вход 6 преобразователя 2. В этой части работа устройства полностью повторяет работу прототипа. ФункционалД1 работает следующим образом. При подаче на вход сигнала отрицательной полярности он проходит через резистор 17, усилитель 15, диод 22 на выход усилителя 16 не из меняя полярности. Через диод 23 сиг нал не проходит. При подачэ на вход блока положительного сигнала он проходит через диод 23 и инвертируе ся усилителем 16, а через цепь диода 22 не проходит. Таким образом на выходе блока в любом случае имеем однополярный сигнал. В результате блок 13 выпрямляет двухполярный сигнал t , а нелинейный элемент 14 реализует расчетный функционал холостого хода и(((в() по формуле (3) для правой полуплоскости на фиг. 2. Нелинейный элемент может быть выполнен по принципу кусочно-линейной аппроксимации нелинейной зависимости. Предлагаемое устройство, благодаря поддержанию неизменного потокосцепления статора двигателя, обеспечивает постоянство заданного в виде сигнала J ot /.d t абсолютного скольжения, в области низких частот, и тем самым улучгаает динамические характеристики двигателя в данной области и пов лиает производительность приводнозго механизма. Экономический эффект достигается за счет повышения производительности оборудования вследствие сокращения времени на. динамические режимы (разгон и торможение) двигателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1979 |
|
SU866681A1 |
| Устройство для управления многодвигательным электроприводом переменного тока | 1987 |
|
SU1422358A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2007 |
|
RU2331152C1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| Устройство для управления частотойВРАщЕНия POTOPA АСиНХРОННОгО элЕКТРОдВигАТЕля | 1979 |
|
SU838996A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЦИФРОВЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ | 2013 |
|
RU2543970C1 |
| Частотно-управляемый тяговый электропривод | 1982 |
|
SU1072231A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-регулируемый электропривод | 1979 |
|
SU866679A1 |
| Устройство для частотного управленияАСиНХРОННыМ дВигАТЕлЕМ | 1978 |
|
SU845255A1 |
УСТРОЙСТВО ДЛЯ ЧАСТОТНОГО . УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ ПО авт. св. 845255, отличают е е с я тем, что, с целью улучшения динамических характеристик двигателя и повышения производительности приводного механизма, в него введены потенциометр, дополнительный блок суммирования и блок функдиоHcina, состоящий из последовательно соединенных блока выделения модуля и нелинейного элемента, причем вцход блока функционала под ключен к входу управления амплитудой напряжения преобразователя частоты, вход блока функционала подключен к выходу дополнительного блока суммирования, первый вход которого подсоединен к входу блока управления частотой преобразователя, а второй вход через потенциометр подсоединен к выходу блока суммирования.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для частотного управленияАСиНХРОННыМ дВигАТЕлЕМ | 1978 |
|
SU845255A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| , | |||
