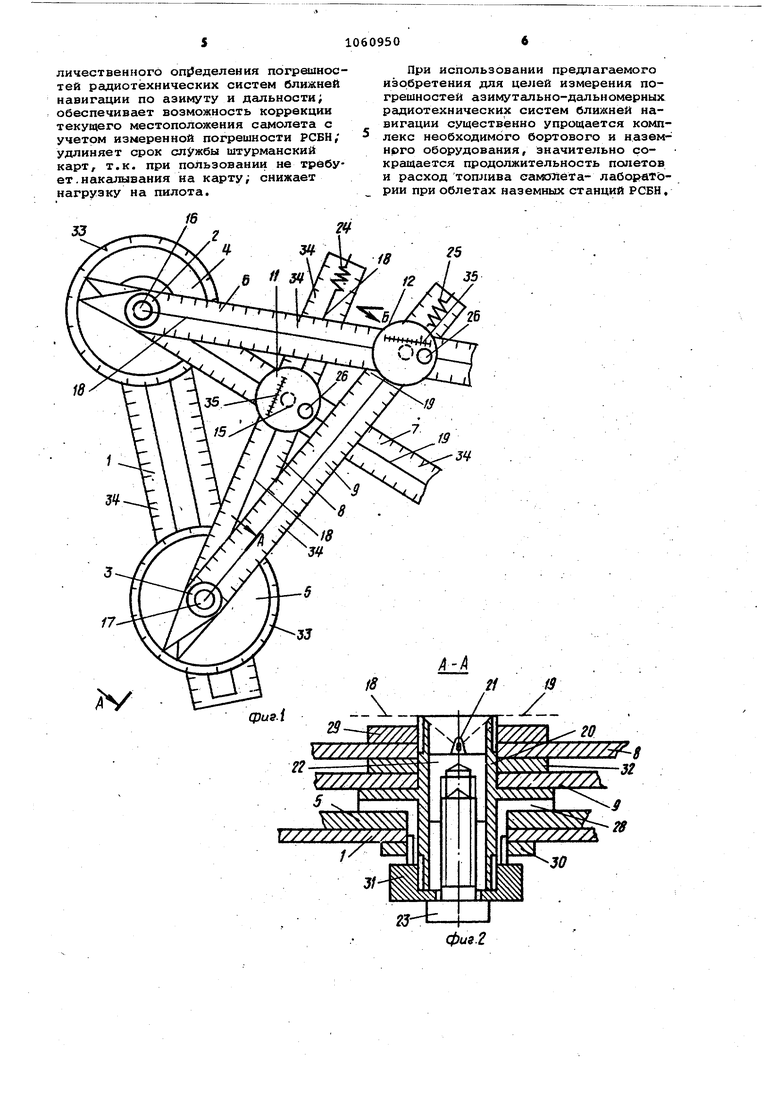
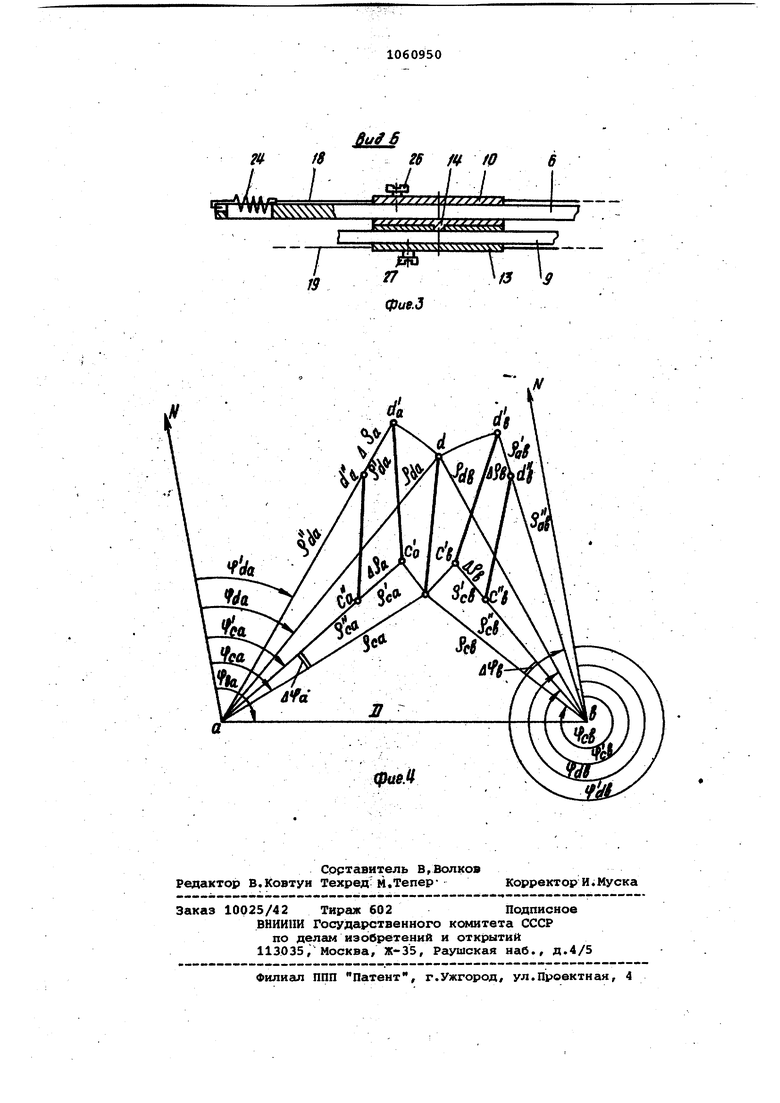
Изобретение oftfocHTCH к навигаци онным устройствам и может быть использовано в отраслях народного ком зяйства, изготовляющих и эксплуатирующих азимутально-дальномерные радиосистемы ближней навигации. Известно вспомогательное навигационное устройство, предназначенное для навигационных вычислений, включсцощее лимбы для отсчета углов и масштабные линейки ij . Наиболее близким к предлагаемому является навигационное устройство, состоящее из двух лимбов и двух шар нирно соединенных с ними масштабных линеек. Это устройство наряду с решением навигационных задач дает возможность определить факт наличия погрешностей тех радиосистем, информацию которых оно испольэует, например азимутально-дальномерных радиосистем ближней навига-, ЦИК 2 . Недостатками известных навигацион ных устройств являются низкая точность и невозможность определить пограиности азимудсально-Дальномерных систем ближней навигации. Цель изобретения - повышение -точности определения навигациониых параметров и расширение функциональных возможностей уст 5ойства. Поставленная цель достигается тем, что вспомогательное навигационное устройство, включаницее два лимба и две шарнирно соединенные с ними масштабные линейки, снабжено соедини тельной линейкой, шарнирно соединеН ной с централш обоих лимбов с возмож ностью их перемещения вдоль оси линейки и двумя вторичными линейками одна из которых шарнирно соединена с центром одного, а другая - с центром другого лимба, причем шарнирные соединения выполнены о возможностью фиксации углов поворота лимбов относительно соединительной линейки и с независимой от этого возможностью фиксации между каждой парой вторичнь линеек, соединенных с общим лимбом причем четыре вторичные линейки снабжены бегунками со шкала, два из которых имеют штифты/ оси которых параллельны осям шарниров, а два других бегунка имеют круглые .углубле ния, при этом каждая пара вторичных линеек, соединенных с одним лимбом, снабжена приводомсинхронного перемещения бегунков, которые соединены с приводом с -Возможностью расцепления. Кроме того, привод синхронного . :ЛинейногоI перемещения двух бегунков выполнен в виде двух нерастяжиАшх не упругих нитей, одни концы которых соединены посредством вертлюга с вйн тоаой парой, образованной ползуном и приводным BHHTOi ii при этом концы нитей пропущены в полую ось шарнирное го соединения лимба, внутри которой размещены вертлюг, ползун и приводной винт, а другие концы нитей через упругий элемент соединены со свободными концами своих линеек. На фиг.1 изображено предлагаемое , вспомогательное навигационное устройство, общий вид/ на фиг.2 - шарнирной соединение разрез А-А на фиг.1, на фиг.З - соединение бегунков, вид Б на фиг.1; на Фиг.4 - схема, поясняквдая принцип работы устройства. Навигационное устройство содержит соединительную линейку 1, с которой посредством шарнирных соединений 2 ft 3 соединены лимбы 4 и 5. Ось шар-. Нирного соединения 3 имеет возможность перемещаться вдоль осевой прорези линейки 1. С центром лимба 4 шарнирно соединены вторичные линейки, б и 7, ас центром лимба 5 вторичные линейки 8 и 9. На вторичных линейках 6-9 Установлены бегунки 10-13. Бегунки 10 и 11 имеют цилиндрические штифты 14 и 15, а бегунки 12 и 13 имеют ответные штифтам цилиндрические углубления. Пара линеек 6 и 7 снабжена привоДОМ 16 синхронного линейного перемещения двух бегунков 10 и 11, а пара ринеек 8 и 9 - приводом 17 синхронного линейного перемещения бегунков 12 и 13. Приводы 16 и 17 идентичны. Привод 17 состоит из двух нерастяжимых неупругих нитей 18 и 19,пропущенных внутрь полой оси 20 шарнирного соединения 3 и соединенных с вертлюгом 21, который соединен с ,ползуном 22, образующим с приводным винтом 23 винтовую пару. Нить 18 соединена с пружиной 24, соединенной с линейкой 8, а нить 19 - с пружиной 25, соединенной с линейкой 9. Нити 18 и 19 могут соединяться с бегунками .10 и 13 с помсицью прижимных винтов 26 и 27. Шарнирные соединения 2и 3 идентичны. Шарнирное соединение 3состоит из полой оси 20, втулки 28, прижимных гаек 29, 30 и 31 и прокладки 32. Лимбы снабжены равномерными шкалами 33 для отсчета углов от О до . 360, соединительная и вторичные линейки снабжены равномерными шкалами 34 для отсчета расстояний, бегунки вторичных линеек снабжены нониусными шксшами 35. На фиг.4 обозначено: точка размещения первой радиосистемы ближней надигации (РСБНа) ау точка размещения второй радиосистемы ближней навиггщии (РСБНв) в; азимут РСВНв относительно РСБНа ipgp ; расстояние от РСБНа до РСБНв) . Пусть координаты самолета измеряются и регистрируются в полете одновременно по сигналам двух станций РСБНа и РСБНв, тогда С ,- d - две точки траектории полета, в которых фактически находится самолет в момен ты времени соответственно, Cg,da. точки положения самолета, зарегистрированные РСБНа в моменты времени i и 12 соответственно при наличии у нее систематической погрешности только по азимуту. Од , Ja - точки положения самолета, зарегистрированные РСБНа в моменты времени . и ig пря наличии у нее систематических погршиностей и по азимуту и по даль ности, G ,(i|, - точки положения самолета, зарегистрированные РСБНв в мся«1екты времени ( и i2 при наличии у нее систематической погрешности только по азимуту, C,dj, - точки положения самолета, зарегистрирбзван ные РСБНв в моменты времени tf и i при наличии у нее систематических погрешностей и по азимуту и по даль ности,(р(.д if JQ - действительные азиму ты самолейта относительно РСБНа в моменты времени t, и 1 -Срсо, измеренные с помощью РСБНа азимуты самолёта в моменты времени ii| и Ц соответственно, , действительные дальности самолета от РСБНа в моменты времени i, и tg соответственно, , р - измеренные с помощьб РСБНа дальности до самолета в моменты времени i, и 2 соответстве но, (f с(, (Зъ действительные азиму ты самолета относительно РСБНа в моменты времени ti и Ij соответственно fee .f3b измеренные с по1жзщью РСБНв азимуты самолета в моменты времени i и ij соответственно, , - дейст вительные, дальности до самолета от РСБНв в моменты времени t и tg соот ветственно, PJ , - измеренные с помощью РСБНв дальности до самолета в моменты времени if и tj соответственмо, 4 PC, - систематическая погреш ность РСБНа по дальности, л -систематическая погрешность РСБНа по азимуту, upt - систематическая погрешность РСБНв по дальности, Л (j, систематическая погрешность РСБНв,по .азимуту. Из фиг.4 следует, что перемещая Со по траекториям da , Сд, С и соответственно, ас и по траекториям с , сь С и ol, соответственно можно добиться цх совмещения в точках с и j , при этом азимуты точек совмещения отличак тся от измеренных с помощью РСБНа и РСБНв азимутов на величины систематических погрешностей обеих систем AcfQ и л соответственно, а дальности точек совмещения отличаются от измеренных с помощью РСБНа и РСБНв дальностей на величины систематических погрешностей обеих систем &рд и ьр соответственно. Предложенное навигационное устройство обеспе- чивает вышеописанное совмещение. Устройство работает следующим образом. Лимбы 4 и 5 устанавливаются на линейке 1 и фиксируются с помощью гаек 30 в соответствии с азимутом |,д и расстоянием D . Вторичные линейки 6 и 7 устанавливаются по шкале лимба 4 на азимуты С} сел соответственно, и угол глежду этими линейками фиксируется гайкой 29 шарнирного соединения 2. Бегунки 10 и 11 вторичных линеек б и 7 по их шкалам устанавливаются на дальности и , соответственно, сцепляются с нитями 18 и 19 и фиксируются винтами 26 и 27 соответственно. Вторичные линейки 8 и 9 устанавливанугся по шкале лимба 5 на азимуты сусь и ЧйЬ соответственно, и угол между ними фиксируется гайкой 29 шарнирного соединения 3. Бегунки . 12 и 13 устанавливаются по шкалам вторичных Линеек 8 и 9 на дальности Рев Pdb соответственно, сцепляются с нитями 18 и 19 соответственно и фиксируются винтами 26 и 27 соответ ственно. Бращением приводных винтов 23 обоих приводов синхронного линейного перемещения бегунков бегунки вторич1ных линеек 6 и 7 посредством имеюишхся на цях штифтов вводятся в зацепление с бегунками вторичных линеек 8 и 9 соответственно. По шкалам 33 лимбов 4 и 5 отсчитываются соответственно азимуты са .MdaWca 4da) fcb «fdb cb .) no шкалам дальностей. 32 вторичных линеек 6-9 отсчитываются соответственно дальности Pda. pea . Р СЬ. Раь i Pdo - pdъ) При разностям , , роа-рса Pcb-pcb-pdb-pdb- Pb . определяются искомые систематические ошибки станций РСБНа и РСБНв по азимуту { А и ucpj, и по дальности (ра и Д рь) . По сравнению с базовым объектом изобретение имеет следующие преиму- ; щества: обеспечивает возможность количественного оп15еделення погрешностей радиотехнических систем ближней навигации по азимуту и дальности; обеспечивает возможность коррекции текущего местоположения самолета с учетом измеренной погрешности РСБН/ удлиняет срок службы штурманский карт, т.к. при пользовании не требует, накалывания на карту; снижает нагрузку на пилота.
При использовании предлагаемого изобретения для целей измерения погрешностей азимутально-дальномерных радиотехнических систем ближней навигации существенно упрощается комплеке необходимого бортового и наземного оборудования, значительно сокращается продолжительность полетов и расход топлива самолета- лаборатории при облетах наземных станций РСБН,
y////j f Э2
гб ш fO 6
dJ...L
J9
WMjirjirjfjrMf4r.mjfjif fJf f I
.«.«.«...Ъ..Х.Ч /г. V..W.iVb. I
фие.д
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ СИСТЕМАТИЧЕСКИХ И СЛУЧАЙНЫХ ПОГРЕШНОСТЕЙ ОБОРУДОВАНИЯ ДЛЯ ЗАДАЧ ОБУЧЕНИЯ ОПЕРАТОРОВ ВОЗДУШНЫХ СУДОВ | 2022 |
|
RU2786264C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ МЕЖСАМОЛЕТНОЙ НАВИГАЦИИ | 2015 |
|
RU2606241C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОБЪЕКТОВ В ПРОСТРАНСТВЕ, ДАЛЬНОСТИ, ПЕЛЕНГА, КООРДИНАТ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152625C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ АВТОНОМНОГО МГНОВЕННОГО ОПРЕДЕЛЕНИЯ ПОЛЬЗОВАТЕЛЯМИ-АБОНЕНТАМИ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, УГЛОВОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ПЕЛЕНГА ПО ФАЗЕ НЕСУЩЕЙ РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ, РЕТРАНСЛИРУЕМЫХ СПУТНИКАМИ | 2004 |
|
RU2286584C2 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1412474A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840219A1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| СИСТЕМА ПОРТАТИВНЫХ КОМПЛЕКТОВ ДЛЯ АВТОМАТИЗИРОВАННОГО ЦЕЛЕУКАЗАНИЯ НА ПОЛЕ БОЯ | 2019 |
|
RU2717138C1 |
1. ВСПОМОГАТЕЛЬНОЕ НАВИГАтЦИОННОЕ УСТРОЙСТВО, включанхцее два лимба и две шарнирно соединенные с ними масштабные линейки, отличаю щ е е с я тем, что, с целью повышения точности определения навигационных параметров, оно снабжено, соединительной линейкой, шарнирно соединенной с центрами обоих лИмбов с возможностью их перемещения оси линейки, и двумя вторичными линейками, одна КЗ которых шарнирно соединена с центром одного, а другая - с центром другого лимба, причем шарнирные соединения выполнены с возможностью фиксации углов поворота лимбов относительно соединительной лиТГейки и с независимой от этого возможностью фиксации между каждой парой вторичных линеек, соединенных с общим лш4бом, причем четыре вторичные линейки снабжены бегунками со шкалами, два из которых имеют штифты, оси которых параллельны осям шарниров, а два других бегунка имеют круглые углубления,при этом каждая пара вторичных линеек, соединенных с одним лимбом, снабжена приводом синхронного перемещения бегунков, которые соединены с приводом с возможностью расцепления. 2. Устройствр по П.1, отличающееся тем, что привод линейного синхронного перемещения двух (Л бегунков выполнен в виде двух нерастяжима:зх неупругих нитей, одни концы которых соединены посредством вертлюга с винтовой парой, образованной ползуном и приводным винтом, при этом 2 концы нитей пропущены в полую ось шарнирного соединения лимба, внутри которой размещены вертлюг, ползун и приводной винт, а другие концы нитей О5 через упругий элетлент соединены со свободными концами своих линеек. СО ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США 3281942, кл | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| патент США 3387372, кл | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
