Изобретение относится к радионавигации и может использоваться в бортовой аппаратуре радиотехнических систем ближней навигации.
Цель изобретения повышение точности.
На чертеже представлена структурная электрическая схема предложенного измерителя.
Измеритель содержит автономный навигационный датчик 1, преобразователь 2 автономных навигационных данных, бытовую радиотехническую систему 3 ближней навигации (РСБН), преобразователь 4 радиотехнических данных, первый блок 5 вычитания, второй блок 6 вычитания, блок 7 фильтрации, включающий третий блок 8 вычитания, первый блок 9 умножения, блок 10 сложения, блок 11 задержки, второй блок 12 умножения, третий блок 13 умножения, первый блок 14 памяти, второй блок 15 памяти, третий блок 16 памяти и синхронизатор 17, преобразователь 18 напряжения в код, навигационный приемник 19, блок 20 измерения азимута и дальности, при этом навигационный приемник 19 содержит входной блок 21, усилитель 22 промежуточной частоты азимута, формирователь 23 азимутального импульса, УПЧ 24 дальности и дешифратор 25.
Комплексный измеритель работает следующим образом.
Автономный навигационный датчик 1 измеряет навигационные параметры движения летательного аппарата, например вектор воздушной скорости  и курсовой угол ϑ В преобразователе 2 автономных навигационных данных осуществляется вычисление оценки Ха(К) координаты Х по измеренным параметрам в дискретном времени kT, где Т период повторения сигналов радиомаяка. Например, в случае
и курсовой угол ϑ В преобразователе 2 автономных навигационных данных осуществляется вычисление оценки Ха(К) координаты Х по измеренным параметрам в дискретном времени kT, где Т период повторения сигналов радиомаяка. Например, в случае  и ϕ осуществляется вычисление проекции вектора
и ϕ осуществляется вычисление проекции вектора и ее суммирование (интегрирование в дискретном времени)
и ее суммирование (интегрирование в дискретном времени)
Vmx(K)  (K)
(K) sinΨ(K)
sinΨ(K)
Сигналы радиомаяка РСБН поступают на вход радионавигационного приемника 19, входящего в состав бортового оборудования РСБН 3, где осуществляется их селекция по частоте и длительности, детектирование и декодирование. По выходным сигналам навигационного приемника 19 с автоматической регулировкой усиления в блоке 20 измерения азимута и дальности измеряются значения азимута  (K) T
(K) T Vmx(K) и дальности
Vmx(K) и дальности  (K). В преобразователе 4 радиотехнических данных осуществляется вычисление оценки
(K). В преобразователе 4 радиотехнических данных осуществляется вычисление оценки (K).
(K).
Выходные сигналы преобразователей 2, 4 автономных и радиотехнических данных поступают на входы второго блока 6 вычитания, на выходе которого в дискретные моменты времени kT образуются разности сигналов  (K) Do(K)·sinαp(K) которые поступают на вход блока 7 фильтрации.
(K) Do(K)·sinαp(K) которые поступают на вход блока 7 фильтрации.
На выходе блока 7 фильтрации образуется сигнал оценки равный
ΔX(K)  (K)-
(K)- (K), где К γi (К) последовательность значений коэффициентов усиления, записанная в i-й зоне памяти первого блока 14 памяти и поступающая на второй вход первого блока 9 умножения;
(K), где К γi (К) последовательность значений коэффициентов усиления, записанная в i-й зоне памяти первого блока 14 памяти и поступающая на второй вход первого блока 9 умножения; (K/K)
(K/K)  (K/K-1)+K
(K/K-1)+K (K)
(K) (K/K-1) сигнал на выходе третьего блока 8 вычитания;
(K/K-1) сигнал на выходе третьего блока 8 вычитания;
Н(К) последовательность коэффициентов, записанная в третьем блоке 16 памяти и поступающая на второй вход третьего блока 13 умножения; (K/K-1)
(K/K-1)  (K)-H(K)
(K)-H(K) (K/K-1) сигнал оценки экстраполяции на выходе второго блока 12 умножения;
(K/K-1) сигнал оценки экстраполяции на выходе второго блока 12 умножения; (K/K-1) Ф(K)
(K/K-1) Ф(K) (K-1/K-1) выходной сигнал блока 7 фильтрации, задержанный в блоке 11 задержки на период Т;
(K-1/K-1) выходной сигнал блока 7 фильтрации, задержанный в блоке 11 задержки на период Т;
Ф(К) последовательность коэффициентов, записанная во втором блоке 15 памяти и поступающая на второй вход второго блока 13 умножения.
Значения коэффициентов с выходов первого 14, второго 15 и третьего 16 блоков памяти в виде чисел поступают на входы соответствующих блоков умножения по сигналу синхронизатора с периодом Т.
Выходным сигналом блока 7 фильтрации является сигнал оценки  (K-1/K-1) погрешности измерения координаты автономным навигационным датчиком. Этот сигнал поступает на вход вычитаемого первого блока 5 вычитания, на второй вход которого поступает значение измеренной координаты
(K-1/K-1) погрешности измерения координаты автономным навигационным датчиком. Этот сигнал поступает на вход вычитаемого первого блока 5 вычитания, на второй вход которого поступает значение измеренной координаты  (K/K). На выходе первого блока 5 вычитания образуется сигнал
(K/K). На выходе первого блока 5 вычитания образуется сигнал  являющийся выходным сигналом комплексного измерителя.
являющийся выходным сигналом комплексного измерителя.
На первом блоке 14 памяти выделено n зон памяти, в которых записаны последовательности значений коэффициентов К γi(К)(i=  (K)
(K)  (K)-ΔX(K/K)= X(K)+[ΔXa(K)-
(K)-ΔX(K/K)= X(K)+[ΔXa(K)- (K/K)] ). Выход этих значений осуществляется таким образом, чтобы i-я последовательность Кγi(К) была оптимальной для фильтрации значений разности ΔХ(К) при дисперсиях погрешностей измерения азимута и дальности γi σ202 и γiσDo2
(K/K)] ). Выход этих значений осуществляется таким образом, чтобы i-я последовательность Кγi(К) была оптимальной для фильтрации значений разности ΔХ(К) при дисперсиях погрешностей измерения азимута и дальности γi σ202 и γiσDo2
Управление выбором зоны памяти в первом блоке 14 памяти осуществляется выходным сигналом преобразователя 18 напряжения в код и основано на выявленной зависимости между погрешностями Δ Хp измерения координаты по данным бортового оборудования РСБН 3 и напряжением автоматической регулировки усиления VАРУ навигационного приемника 19.
В описании известного устройства показано, что если коэффициенты усиления блока 7 фильтрации рассчитаны на дисперсию σo2 входных данных, а последние имеют дисперсию γ σo2 то дисперсия погрешности измерения также возрастает в γ раз.
Поэтому если выбрать шаг преобразования напряжения ПРУ в код равномерным и достаточно малым (число разрядов достаточно большим), соответствующим изменению дисперсии входных данных на величину Δ γ σo2, то при дисперсии входных данных блока 7 фильтрации в пределах [ γi σo2 ( γi + Δ γ ) σo2 с помощью напряжения АРУ будет выбрана зона памяти с коэффициентами Кi(K) и увеличение дисперсии погрешности измерения по сравнению с оптимальным значением σ 2опт не превысит Δ γ σопт2.
Напряжение АРУ навигационного приемника 19 используется в предлагаемом комплексном измерителе, кроме управления усилением усилителей промежуточной части азимута и дальности, и в качестве входного сигнала преобразователя 18 напряжения в код, выбирающего соответствующую зону памяти в первом блоке памяти 14 блока фильтрации.
Преобразователь 18 напряжения в код представляет собой многоуровневый компаратор (аналого-цифровой преобразователь), на сигнальный вход которого подается напряжение VАРУ автоматической регулировки усиления навигационного приемника 19.
Уровни сравнения λ1 λ2 λn устанавливаются исходя из максимально-возможного значения UАРУ конкретного навигационного приемника 19, а также зависимости погрешностей Δ Хp от уровня помех на входе навигационного приемника 19.
На выходе преобразователя 18 напряжения в код образуется n-разрядный параллельный двоичный код, значения которого однозначно соответствуют интервалам превышения UАРУ уровней сравнения λ1 λn.
На сигнальный вход преобразователя 18 подается напряжение UАРУавтоматической регулировки усиления навигационного приемника 19. Трехразрядный параллельный двоичный код, соответствующий интервалам превышения напряжения АРУ уровней сравнения λ1 λ3, c выхода преобразователя 18 напряжения в код подается на адресный вход управления первым блоком памяти 14, где производится включение зоны памяти коэффициента усиления блока 7 фильтрации Кi(K), оптимального для данного уровня помех. При значении кода "000", соответствующем мощности сигнала, при котором погрешности измерения Δ Хp недопустимо велики, коэффициент усиления Кi(K)=0 и на выход блока 7 фильтрации передается экстраполированное значение погрешности K (K)(i=
(K)(i= ) изменения координаты. Таким образом, большие погрешности измерения Δ Хр не влияют на работу комплексного измерителя.
) изменения координаты. Таким образом, большие погрешности измерения Δ Хр не влияют на работу комплексного измерителя.
Первый, второй и третий блоки 14, 15, 16 памяти представляют собой любые известные постоянные запоминающие устройства с адресным входом и выходом данных.
В первом блоке 14 памяти на старшие разряды адресного входа подается код с выхода преобразователя 18 напряжения в код, осуществляющий выбор i-й зоны памяти.
На младшие разряды адресного входа подается код от синхронизатора 17, осуществляющий выбор значений коэффициента усиления К γi (K) в зависимости от номера К.
Эффективность предлагаемого устройства обеспечивается выявленной детерминированной зависимостью между напряжением АРУ и дисперсией входных данных блока 7 фильтрации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИДЕНТИФИКАЦИИ РАДИОМАЯКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
SU1575720A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ И КОРРЕКЦИИ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1840219A1 |
| ПОМЕХОУСТОЙЧИВЫЙ БОРТОВОЙ ПРИЕМНИК РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ | 2010 |
|
RU2427074C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Комплексный измеритель азимута и дальности | 1985 |
|
SU1412471A1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
Изобретение относится к радионавигации и позволяет повысить точность измерения. Устройство содержит автономный навигационный датчик (АНД) 1, преобразователь 2 автономных навигационных данных, бортовую радиотехническую систему ближней навигации (РСБН) 3, состоящую из навигационного приемника (НП) 19 и блока измерения азимута и дальности, преобразователь 4 радиотехнических данных, блоки вычитания 5, 6, блок 7 фильтрации, состоящий из блока вычитания 8, блоков 9, 12, 13 умножения, блока 10 сложения, блока 11 задержки, блоков памяти 14, 15, 16 и синхронизатора 17, преобразователь 18 напряжения в код, навигационный приемник 19, блок 20 измерения азимута и дальности, НП 19 состоит из входного блока 21, усилителя 22 промежуточной частоты азимута, формирователя 23 азимутального импульса, усилителя 24 промежуточной частоты дальности и дешифратора 25. АНД 1 имеряет навигационные параметры движения летательного аппарата (вектор воздушной скорости и курсовой угол). В радионавигационном приемнике 19 осуществляется селекция по частоте и длительности сигналов радиомаяка РСБН. Учитывая полученные данные, в блоке 7 фильтрации определяется погрешность измерения координаты в АНД 1. При этом осуществляется адаптация устройства к изменению уровня помех на входе бортового оборудования РСБН путем управления коэф. усиления фильтра измерителя с помощью напряжения автоматической регулировки усиления НП 19 бортового оборудования РСБН. 1 ил.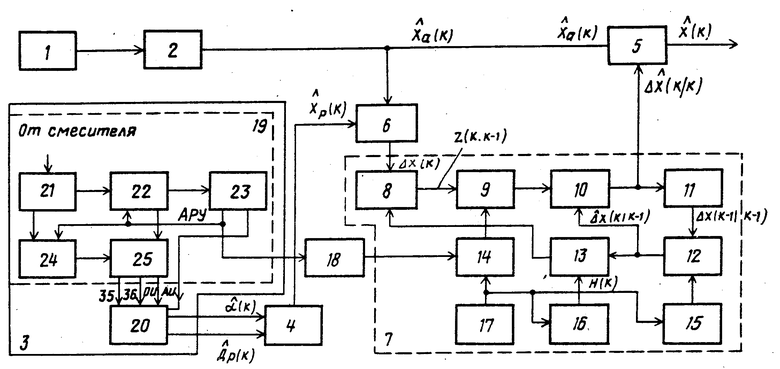
КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТЫ ЛЕТАТЕЛЬНОГО АППАРАТА, содержащий последовательно соединенные автономный навигационный датчик и преобразователь автономных навигационных данных, бортовую радиотехническую систему ближней навигации, включающую блок измерения азимута и дальности и навигационный приемник, содержащий последовательно соединенные входной блок, усилитель промежуточной частоты азимута и формирователь азимутального импульса, последовательно соединенные усилитель промежуточной частоты дальности и дешифратор, второй выход входного блока соединен с первым входом усилителя промежуточной частоты дальности, второй вход дешифратора соединен с вторым выходом усилителя промежуточной частоты азимута, первый выход формирователя азимутального импульса соединен с входом азимутального импульса блока измерения азимута и дальности, вход опорных импульсов, вход сигнала "35" и вход сигнала "36" которого соединены с соответствующими выходами дешифратора, второй выход формирователя азимутального импульса является выходом напряжения автоматической регулировки усиления и соединен с вторыми входами усилителей промежуточной частоты азимута и дальности, преобразователь радиотехнических данных, первый и второй блоки вычитания и блок фильтрации, при этом выход преобразователя автономных навигационных данных соединен с входом уменьшаемого первого и второго блоков вычитания, азимутальный и дальномерный выходы бортовой радиотехнической системы ближней навигации, являющиеся выходами блока измерения азимута и дальности, соединены с входами преобразователя радиотехнических данных, выход которого соединен с входом вычитаемого второго блока вычитания, выход которого соединен с входом блока фильтрации, содержащим последовательно соединенные третий блок вычитания, первый блок умножения, блок сложения, блок задержки, второй блок умножения и третий блок умножения, выход которого соединен с входом вычитаемого третьего блока вычитания, вход уменьшаемого которого является входом блока фильтрации, первый, второй и третий блоки памяти и синхронизатор, выход которого соединен с входами первого, второго и третьего его блоков памяти, выход второго блока умножения соединен с вторым входом блока сложения, выходы первого, второго и третьего блоков памяти соединены с вторыми входами соответственно первого, второго и третьего блоков умножения, выход блока сложения является выходом блока фильтрации и соединен с входом вычитаемого первого блока вычитания, выход которого является выходом комплексного измерителя координаты летательного аппарата, отличающийся тем, что, с целью повышения точности, введен преобразователь напряжения в код, вход которого соединен с вторым выходом формирователя азимутального импульса, а выход соединен с управляющим входом первого блока памяти блока фильтрации.
| Гришин Ю.П., Казаринов Ю.М | |||
| Динамические системы, устойчивые к отказам | |||
| М.: Радио и связь, 1985, с.69, 132. |
