Изобретение относится к области автоматики и вычислительной техники и предназначено для определения точных координат местоположения летательного аппарата и коррекции автономного счисления, а также для оценки точности счисления в навигационном комплексе (НК) на этапе его летных испытаний.
Известны бортовые устройства определения координат и их коррекции: радиотехническая система ближней навигации (РСБН) [1], радиотехническая система дальней навигации (РСДН) [3], радиолокационная станция (РЛС) [2], а также система внешнетраекторных измерений (ВТИ), содержащие наземные радиомаяки (или ориентиры), сопряженный с ними параллельно по радиоканалу приемопередающий блок, один из входов приемопередающего блока соединен также с выходом блока управления, а выход приемопередающего блока последовательно соединен с блоком измерения координат и блоком сопряжения с НК.
Перечисленные устройства обеспечивают формирование и передачу в НК либо полярных координат, например, азимута А и дальности Д при работе с РСБН, либо географических координат широты ϕ и долготы λ, например, при работе с РСДН, либо при работе системы ВТИ формирование координат местоположения объекта (МПО) в заданной системе координат.
Недостатками известных устройств являются:
- низкая точность коррекции из-за наличия большой и флюктуационной и систематической составляющих ошибок в определении координат МПО;
- сложность системы ВТИ для определения координат МПО на этапе испытаний;
- высокая стоимость ВТИ и не полная обеспеченность измерений на всей трассе испытаний.
Из известных бортовых устройств, применяемых для определения координат МПО и выполнения коррекции автономного счисления, наиболее близкой по технической сущности является дальномерная система ДМЕ [4], содержащая наземные радиомаяки, соединенные по радиоканалу параллельно с приемопередающим блоком, один из выходов приемопередающего блока соединен также с выходом блока управления, а выход приемопередающего блока соединен с последовательно соединенными блоком измерения координат и блоком сопряжения с НК.
Сопряженные блок управления и приемопередающий блок устройства типа ДМЕ обеспечивают настройку устройства на работу с конкретными наземными радиомаяками, при этом для организации параметрической избыточности и получения требуемой точности практически одновременно измеряется до 20 дальностей до наземных радиомаяков, что равнозначно десятикратному измерению координат МПО и приводит к сокращению ошибки за счет параметрической избыточности ˜ в 3 раза.
Недостатками многоканальной дальномерной системы типа ДМЕ являются:
- необходимость наличия на трассе полетов сети наземных радиомаяков, обеспечивающих возможность работы с борта объекта одновременно с несколькими такими станциями (в условиях СССР построить такую сеть невозможно и в связи с этим не может быть обеспечена высокая точность);
- усложнение корректора для обеспечения практически одновременной работы с несколькими наземными радиомаяками.
Целью изобретения является повышение точности определения и коррекции координат и упрощения устройства.
Поставленная цель достигается тем, что в устройство для определения и коррекции координат местоположения летательного аппарата введены последовательно соединенные блок памяти, преобразователь кодов и первый дешифратор, первый выход которого соединен с входом блока формирования корректирующей информации, второй выход - с входом блока выделения радионавигационной информации, выход блока формирования корректирующей информации соединен со вторым входом блока памяти, третий вход которого соединен с выходом блока сопряжения с навигационным комплексом, который соединен двухсторонней связью с блоком формирования корректирующей информации, блок выделения радионавигационной информации соединен с входом блока сопряжения с навигационным комплексом, а также тем, что блок формирования корректирующей информации содержит последовательно соединенные регистр сдвига №1, первый узел элементов И, первый сумматор, первый блок умножения и первый узел элементов ИЛИ последовательно соединенные второй дешифратор, второй узел элементов И, второй сумматор и второй блок умножения, первый, второй, третий и четвертый селекторы, второй узел элементов ИЛИ вход второго дешифратора подключен к второму выходу регистра сдвига №1, третий выход которого соединен со вторым входомвторого узла элементов И, четвертый и пятый выходы - соответственно с входами первого и второго селекторов, первый вход второго узла элементов ИЛИ соединен с первым выходом второго селектора, второй вход - с выходом первого селектора и вторым входом первого узла элементов ИЛИ, третий вход - с вторым выходом первого селектора, четвертый вход - с вторым выходом второго сумматора, третий выход которого соединен с его вторым входом, третий вход - с выходом четвертого селектора, четвертый вход - с первым выходом второго блока умножения, третий вход первого узла элементов ИЛИ подключен к второму выходу второго селектора, четвертый вход - к второму выходу второго блока умножения, выход третьего селектора соединен со вторым входом первого сумматора, третий вход которого подключен к второму выходу первого блока умножения, четвертый вход - к третьему выходу первого сумматора, второй вход первого узла элементов И соединен с вторым выходом второго дешифратора, вход регистра сдвига №1 является входом блока, входы 3-го и 4-го селекторов и выход первого узла элементов ИЛИ являются двусторонней связью блока, выход второго узла ИЛИ является выходом блока, а также тем, что блок выделения радионавигационной информации содержит последовательно соединенные пятый селектор, третий сумматор, третий блок умножения и третий узел элементов ИЛИ, причем второй выход пятого селектора соединен со вторым входом третьего узла элементов ИЛИ, а второй выход третьего сумматора с его вторым входом, вход 5-го селектора является входом блока, выход 3-го узла элементов ИЛИ является выходом блока.
Математическое описание изобретения основано на том, что ошибка счисления в НК является медленно изменяющейся функцией и на интервале времени, на котором погрешность НК изменяется на пренебрежимо малую величину, можно выполнить несколько независимых измерений координат МПО с помощью радиотехнического или внешнетраекторного измерителя. Это позволяет изменить принцип организации избыточности измерительной информации - избыточность формируется не за счет увеличения быстродействия измерительных трактов или ввода большего количества параллельных измерений, а за счет применения для определения координат одной точки совокупности замеров, выполненных в разных по времени точках, т.е. за счет использования временной избыточности измерительной информации.
Для описания математической модели предлагаемого устройства введем некоторые определения:
- точки траектории полета летательного аппарата, в которых выполняется формирование точных координат МПО, осуществляется коррекция счисления или производится его оценка, будем называть узловыми;
- точки, в которых реализовано запоминание данных НК и радиотехнической системы навигации (или РЛС), но не вычисляются точные координаты, будем называть точками оценки.
Вычисление координат узловых точек выполняется в два этапа:
- приведение (концентрация) информации к узловым точкам;
- вычисление точных координат и поправок в узловых точках обработкой полученной совокупности данных.
Векторное уравнение, фиксирующее способ приведения информации к узловым точкам можно записать в виде

где
 - вектор, определяющий МПО в К-й точке оценки по данным радиотехнических систем навигации;
- вектор, определяющий МПО в К-й точке оценки по данным радиотехнических систем навигации;
 - вектор, определяющий МПО в К-й точке оценки по данным НК;
- вектор, определяющий МПО в К-й точке оценки по данным НК;
 - вектор, определяющий МПО в узловой точке оценки по данным НК.
- вектор, определяющий МПО в узловой точке оценки по данным НК.
С учетом погрешностей вычисления координат МПО компоненты векторного равенства (1) определяются следующей системой уравнений:
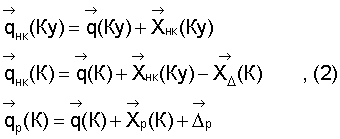
где  - вектора, определяющие истинные координаты МПО в узловой точке и в точках оценки;
- вектора, определяющие истинные координаты МПО в узловой точке и в точках оценки;
 - вектор ошибки НК в определении координат узловой точки;
- вектор ошибки НК в определении координат узловой точки;
 - вектор ошибки НК, накапливаемой в полете от К-й точки до узловой;
- вектор ошибки НК, накапливаемой в полете от К-й точки до узловой;
 - случайная составляющая ошибки радиотехнической системы навигации в К-й точке оценки;
- случайная составляющая ошибки радиотехнической системы навигации в К-й точке оценки;
 - систематическая составляющая ошибки радиотехнической системы навигации.
- систематическая составляющая ошибки радиотехнической системы навигации.
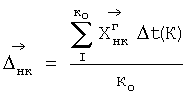
И, наконец, для вычислений  можно выписать уравнение
можно выписать уравнение

где  - градиент изменения позиционной ошибки НК;
- градиент изменения позиционной ошибки НК;
Δt(К) - время полета от точки оценки К до узловой;
t(Ку) - время пролета узловой точки.
Подставляя (2) и (3) в (1) получим уравнение, определяющее точность приведения по данным НК радиотехнической информации к узловой точке:

Из (4) видно, что в результате приведения к узловой точке получена совокупность измерений координат одной узловой точки по замерам, выполненным в К-х точках оценки. Влияние ошибок НК на точность измерения координат МПО в каждой точке оценки, как видно из сравнения (4) и (2), проявляется в появлении составляющей ошибки, вызванной наличием градиента  Координаты узловой точки вычисляются нахождением математического ожидания полученной совокупности
Координаты узловой точки вычисляются нахождением математического ожидания полученной совокупности  :
:
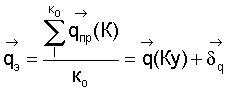


где  - вектор случайной составляющей ошибки измерения координат узловой точки по полученным в Ко точках оценки данным;
- вектор случайной составляющей ошибки измерения координат узловой точки по полученным в Ко точках оценки данным;
 - вектор ошибки измерения координат узловой точки от ошибок НК;
- вектор ошибки измерения координат узловой точки от ошибок НК;
Ко - количество точек оценки.
Можно допустить, что на интервале 3-4 минуты  .
.
Тогда  можно вычислить по формулам
можно вычислить по формулам
Очевидно, что если узловые точки по времени располагать в центре совокупности измерений, можно получить  и формулу для вычисления оценок погрешности измерений местоположения узловой точки и для вычисления ее среднеквадратического отклонения можно записать в виде
и формулу для вычисления оценок погрешности измерений местоположения узловой точки и для вычисления ее среднеквадратического отклонения можно записать в виде

где  - среднеквадратическая ошибка измерений МПО радиотехнической системой навигации (или РЛС), используемой в УТМ-К в качестве входного измерительного тракта;
- среднеквадратическая ошибка измерений МПО радиотехнической системой навигации (или РЛС), используемой в УТМ-К в качестве входного измерительного тракта;
 - среднеквадратическая ошибка измерения координат МПО устройства УТМ-К.
- среднеквадратическая ошибка измерения координат МПО устройства УТМ-К.
Из рассмотрения (7) видно, что в результате приведения по формуле (1) получена совокупность Ко измерений, позволяющих оценить координаты узловой точки с сокращением флюктуационной погрешности в  раз. Применение для оценки в качестве входного измерительного тракта РСБН, позволяющих выполнить независимые замеры через ˜ 10 сек, позволяет получить на интервале 4 минуты до 24 независимых измерений, случайная составляющая ошибки в этом случае может быть уменьшена в ˜ 4,9 раза. При наличии в совокупности приведенных к узловой точке по формуле (1) измерений данных относительно двух или нескольких радиомаяков (или ориентиров) может быть вычислена и использована для дальнейших оценок и систематическая составляющая ошибок входного измерительного тракта "борт-земля".
раз. Применение для оценки в качестве входного измерительного тракта РСБН, позволяющих выполнить независимые замеры через ˜ 10 сек, позволяет получить на интервале 4 минуты до 24 независимых измерений, случайная составляющая ошибки в этом случае может быть уменьшена в ˜ 4,9 раза. При наличии в совокупности приведенных к узловой точке по формуле (1) измерений данных относительно двух или нескольких радиомаяков (или ориентиров) может быть вычислена и использована для дальнейших оценок и систематическая составляющая ошибок входного измерительного тракта "борт-земля".
Таким образом, основными особенностями предлагаемого устройства являются следующие.
1. Для решения задачи коррекции или оценок НК используются не отдельные, полученные с использованием РСБН, РСДН, РЛС или ВТИ измерения, а совокупность радионавигационных замеров, для чего в устройство определения и коррекции координат летательного аппарата вводится блок памяти, в котором осуществляется исправление с учетом определенных ранее поправок и накопление радионавигационной информации.
2. Для решения задачи приведения в соответствии с (1) радионавигационной информации к узловым точкам и, таким образом, получения совокупности замеров ее координат вводится блок преобразования кодов координат.
3. Для определения в соответствии с (5) эталонных координат узловых точек по совокупности радионавигационных измерений, содержащих данные относительно одного радиомаяка, радиолокационного ориентира и т.д., в устройство введен блок выделения радионавигационной информации.
4. Для определения в соответствии с (5) эталонных координат узловых точек и выделения систематических ошибок измерительного радиоканала "борт-земля" по совокупности радионавигационных измерений, содержащих данные относительно двух и более радиомаяков, радиолокационных ориентиров и т.д. в устройство введен блок формирования корректирующей информации.
5. Применение перечисленных в пп.1-4 блоков в совокупности обеспечивает при наличии в устройстве только 1-го измерительного тракта возможность получения и параметрической и временной избыточности данных для оценки координат узловых точек, т.е. увеличение точности сопровождается упрощением (по сравнению с системой типа ДМЕ) конструкции устройства.
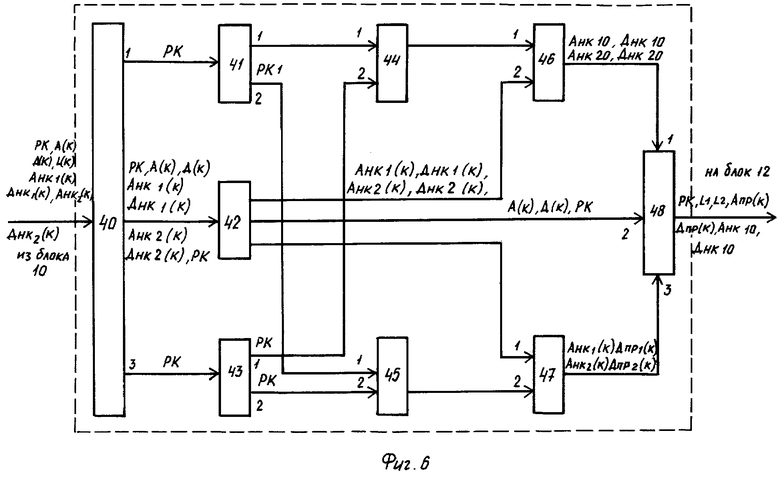
Сущность изобретения иллюстрирована на фиг.1-7, где на фиг.1 представлена блок-схема известного устройства, на фиг.2 - блок-схема предлагаемого устройства, на фиг.3 - блок-схема формирования корректирующей информации, на фиг.4 - блок-схема выделения радионавигационной информации, на фиг.5 - блок-схема блока памяти, на фиг.6 - блок-схема блока преобразования кодов координат и на фиг.7 - блок-схема блока сопряжения с НК.
На фиг.1-7 приняты следующие обозначения:
1, 2, 3, 4, 5 - наземные радиомаяки;
6 - приемопередающий блок;
7 - блок управления;
8 - блок измерения координат;
9 - блок сопряжения с НК;
10 - блок памяти;
11 - блок преобразования кодов координат;
12 - 1-ый дешифратор;
13 - блок формирования корректирующей информации;
14 - блок выделения радионавигационной информации;
15, 40, 50 - регистр сдвига №1, 2 и 3;
 1-ый - 9-ый селекторы соответственно;
1-ый - 9-ый селекторы соответственно;
17, 41, 43 - 2-ой - 4-ый дешифраторы соответственно;
 1-ый - 6-ой узлы элементов И соответственно;
1-ый - 6-ой узлы элементов И соответственно;
26, 21, 32, 51 - 1-ый - 4-ый узлы элементов ИЛИ соответственно;
 - 1-ый - 6-ой сумматоры соответственно;
- 1-ый - 6-ой сумматоры соответственно;
24, 25, 31 - 1-ый - 3-ий блоки умножения соответственно;
36 - регистр адреса;
38, 39 - оперативные запоминающие устройства №1 и №2;
А, Д - азимут и дальность до радиомаяка (радиолокационного ориентира или наземной станции ВТИ);
L - номер канала наземного радиомаяка;
РК - разовая команда, идентифицирующая наличие переключения используемого канала наземного радиомаяка;
К - номер точки оценки;
Анк1, Днк1 - вычисленные по данным НК азимут и дальность до наземного радиомаяка №1, с которым по радиоканалу осуществлялась связь до момента перехода на новый радиомаяк;
Анк2, Днк2 - вычисленные по данным НК азимут и дальность до наземного радиомаяка №2, с которым по радиоканалу осуществлялась связь после перехода на новый радиомаяк;
А1, Д1 - азимут и дальность от узловой точки до радиомаяка №1, вычисленные по совокупности данных, полученных при работе с радиомаяком №1;
А2, Д2 - азимут и дальность от узловой точки до радиомаяка №2, вычисленные по совокупности данных, полученных при работе с радиомаяком №2;
Апр(К), Дпр(К) - приведенные к узловой точке значения азимута и дальности, вычисленные по данным РСБН, полученным в К-ой точке оценки;
1, 2 - соответственно номера каналов наземных станций РСБН №1 и №2;
А1, А2 - азимутальные поправки, вычисленные для компенсации систематических составляющих ошибок тракта "борт- земля" при работе с радиомаяками №1 и №2;
PK1 - разовая команда, идентифицирующая пролет узловой точки (РK1=0) до узловой точки; PK1=1 в узловой точке и в точках оценки после узловой точки);
Ко - количество используемых для определения координат узловой точки точек оценки.
Представленные на фиг.1 блоки известного устройства имеют следующее назначение.
Наземные радиомаяки (блоки 1-5) обеспечивают прием запросных сигналов, формирование и передачу по радиоканалу на летательных аппаратах на фиксированной для каждого радиомаяка частоте опорных азимутальных и ответных сигналов.
Блок управления (7) обеспечивает настройку (по частоте) на работу с конкретным радиомаяком.
Приемопередающий блок (6) обеспечивает передачу по радиоканалам запросных импульсов и прием опорных и ответных импульсов, причем в ДМЕ связь осуществляется одновременно (вернее, практически одновременно) с несколькими наземными радиомаяками.
Блок измерения координат (8) выполняет выделение временных интервалов от момента формирования запросного сигнала до прихода ответного импульса и от момента прихода опорного сигнала до момента прихода азимутального сигнала, соответствующих в некоторый момент времени t(К) дальности Д(К) до радиомаяка и азимуту А(К) на радиомаяк. В ДМЕ измерение азимута не выполняется, реализуется одновременное измерение нескольких дальностей.
Блок сопряжения с НК реализует передачу в НК измеренных по изложенной схеме координат Д(К) и А(К), которые в последнем используются для осуществления коррекции.
Устройство работает следующим образом.
Приемопередающее устройство (6), настроенное на нужные частоты блоком управления (7), реализует формирование, передачу и прием радиотехнических сигналов от наземных радиомаяков (1-5), которые преобразуются блоками (8) и (9) в нужную форму и передаются без задержки в НК.
Как уже отмечалось выше при описании математической модели устройства определения и коррекции координат летательного аппарата основной отличительной особенностью предлагаемого устройства является изменение принципа получения корректирующей (эталонной) информации - эталонные измерения реализуются в узловых точках оценки. Для решения этой задачи изменена и связь с НК. Если в известном устройстве реализуется только передача в НК корректирующих данных, то в предлагаемом устройстве введена двухсторонняя связь с НК.
Рассмотрим подробнее работу каждого блока и работу устройства в целом, блок - схема которого представлена на фиг.2.
Как и в известном устройстве, в предлагаемом устройстве наземные радиомаяки (1) и (2) обеспечивают прием запросных сигналов, формирование и передачу по радиоканалу на летательный аппарат на фиксированной для каждого радиомаяка частоте опорных, азимутальных и ответных сигналов. Блок управления (7) также обеспечивает настройку на работу с конкретным радиомаяком. Приемопередающий блок (6) также обеспечивает передачу по радиоканалам запросных импульсов и прием опорных, ответных и азимутальных импульсов. Причем не накладывается требование на одновременную работу с несколькими радиомаяками.
Перечисленные функции выполняет, например, установленная на Ил-62 в системе "Полет-1" РСБН.
Блок измерения координат (8) выполняет:
- выделение электрических сигналов, соответствующих в момент времени t(К), например, величинам Д(К) и А(К);
- формирование и передачу в блок памяти кодов полярных координат азимута А и дальности Д местоположения летательного аппарата, измеренных изложенным выше для известного устройства способом;
- формирование и передачу в блок памяти логического сигнала РК переключения каналов радиотехнической системы навигации, фиксирующего факт настройки посредством блока управления (7) на новый канал радиомаяка и получения устойчивой связи с этим каналом;
- передачу в блок памяти заданного блоку управления для организации радиоканала номера L наземного радиомаяка.
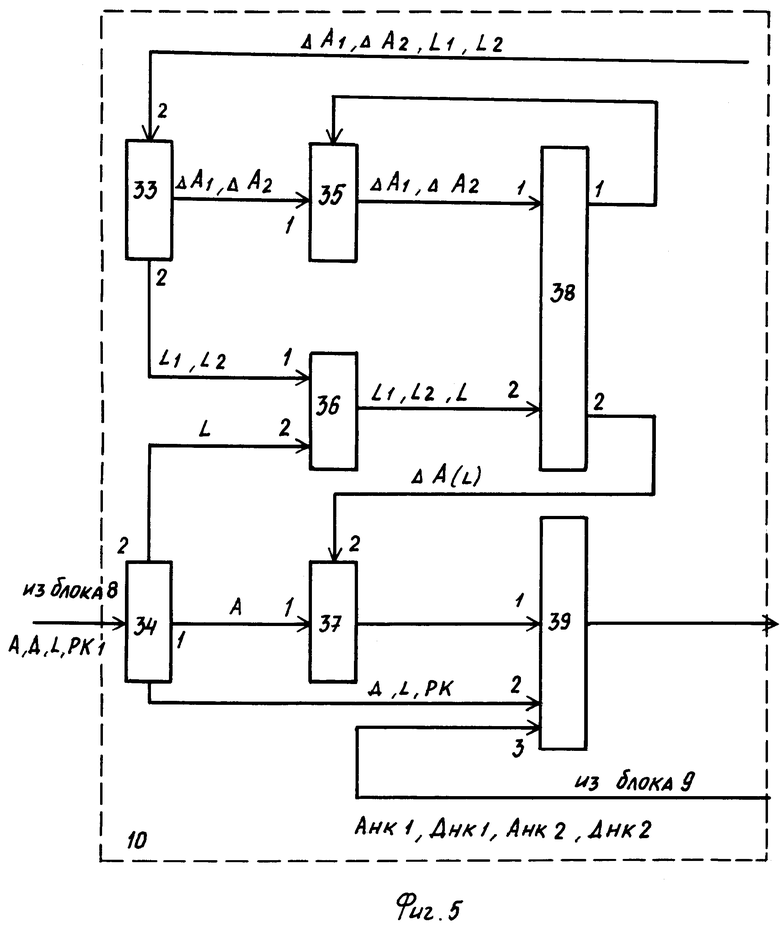
Блок памяти (10) состоит (см. фиг.5) из последовательно соединенных селектора (33), сумматора (35) и ОЗУ №1 (38), последовательно соединенных селектора (34), сумматора (37) и ОЗУ №2 (39), регистра адреса (36), первый вход которого соединен со вторым выходом селектора (33), второй вход - со вторым выходом селектора (34), выход регистра адреса (36) соединен со вторым входом ОЗУ №1 (38), первый выход которого соединен со вторым входом сумматора (35), а второй - со вторым входом сумматора (37), третий выход селектора (34) соединен со вторым входом ОЗУ №2 (39), первым входом в блок (10) является первый вход селектора (34), вторым - второй вход селектора (33), третьим - третий вход ОЗУ №2 (39), а выходом блока (10) является выход ОЗУ №2.
Блок памяти (10) предназначен для запоминания значений азимутальных поправок ΔА(L1) и ΔА(L2), вычисленных для компенсации систематических составляющих ошибок тракта "борт-земля" при работе с радиомаяками №1 (канал L1) и №2 (канал L2) и их использования для уточнения измеренных значений азимутов А(К), для запоминания измеренных по радиоканалам значений дальности Д(К) и уточненных с учетом ΔА(L1) или ΔА(L2) азимутов А(К), для запоминания Анк1(К), Днк1(К), Aнк2(K), Днк2(К) азимутов и дальностей относительно радиомаяков №1 и №2, вычисленных в НК (способ вычисления Анк и Днк см. в [6]). Здесь К - номер точки оценки. Накопление данных выполняется по результатам замеров в Ко точках оценки, узловой точкой является средняя точка с номером (Ко+1)/2. При наличии переключения радиомаяков проводится накопление данных (Ко-1)/2 точек оценки с первым радиомаяком и данных (Ко+1)/2 точек оценки (в том числе и узловой) со вторым радиомаяком. Накопление азимутальных поправок ΔА(L), (ΔA(L1),ΔА(L2)) выполняется в ОЗУ №1 (38), массивов азимутов, дальностей, соответствующих им номеров каналов L(К) и запоминания логического сигнала РК переключения радиомаяков - в ОЗУ №2 (39).
Как видно из фиг.5 в блоке (10) в ОЗУ №1 и ОЗУ №2 накапливается информация, поступающая из блоков (8),(13) и (9) на первый, второй и третий входы блока (10) соответственно в следующей последовательности:
- из блока (13) азимутальные поправки ΔА1 и ΔА2 поступают вместе с номерами каналов РСБН L1 и L2 на вход селектора (33), где они выделяются и поступают на первый вход сумматора (35), номера каналов L1 и L2 поступают со второго выхода селектора (33) на первый вход адресного регистра (36), адресный регистр (36) сопряжен с ОЗУ №1 (38) и из ОЗУ №1 выводятся и подаются на вход сумматора (35) вычисленные ранее и запомненные значения ΔА(L1) и ΔА(L2), где они складываются соответственного ΔА1 и ΔА2, поступающими с первого выхода селектора (33), и поступают на первый вход ОЗУ №1 (38), в котором они заменяют хранящиеся ранее ΔА(L1) и ΔА(L2);
- измеренные данные из блока (8) поступают на селектор (34), в селекторе (34) выделяются и поступают на второй вход регистра адреса (36) номер канала радиомаяка L, который подается на второй вход ОЗУ №1 (38), со второго выхода которого поступает на второй вход сумматора (37) соответствующее значение азимутальной поправки ΔА(L), а на первый вход сумматора (37) поступает с первого выхода селектора (34) измеренное в блоке (8) значение азимута А, в сумматоре (37) измеренное значение азимута уточняется с учетом ΔА(L) и поступает на первый вход ОЗУ №2 (39), остальные параметры блока (8) поступают с третьего выхода селектора (34) на второй вход ОЗУ №2 (39), информация из блока (9) поступает на третий вход ОЗУ №2 (39) без промежуточных преобразований, т.о. в ОЗУ №2 (39) накапливается массив данных MI(К) размерности 7×Кo, накопление MI(К) проводят для Кo=1-99, по завершению накопления MI(К) из ОЗУ №2 (39) выводят в блок (11) MI(К) и РК.
Блок преобразования кодов координат (II) состоит, как видно из фиг.6, из последовательно соединенных регистра сдвига №2 (40), дешифратора №3 (41), узла элементов И №3 (44), узла элементов И №5 (46) и сумматора №6 (48), последовательно соединенных дешифратора №4 (43), узла элементов И №4 (45) и узла элементов И №6 (47) и селектора №8 (42), вход которого соединен со вторым выходом регистра сдвига №2 (40), первый выход - со вторым входом узла элементов И №5 (46), второй - со вторым входом сумматора №6 (48), третий - с первым входом узла элементов И №6 (47), выход которого соединен с 3-им входом сумматора № 6(48), первый выход дешифратора №4 (43) соединен со вторым входом узла элементов И №3 (44), второй выход дешифратора №3 (41) соединен с первым входом узла элементов И №4 (45), на вход блока II на регистр сдвига №2 (40) поступает массив данных MICK) и разовая команда РК, которая идентифицирует наличие переключения радиомаяков, с выхода блока (11) - с выхода сумматора №6 (48) поступают РК, L1, L2, Апр(К), Дпр(К), Анк10, Днк10.
В блоке преобразования кодов координат (11) последовательно перекачивается накопленная блоком (10) радионавигационная информация и реализуется в соответствии с формулами (1) приведение накопленных данных к узловой точке. Указанная задача решается в сумматоре №6 (48) суммированием текущих значений А(К) и Д(К) с их изменением, вычисленным по данным НК:

где Анк10, Днк10 - вычисленные в НК значения азимута и дальности от узловой точки до радиомаяка №1 
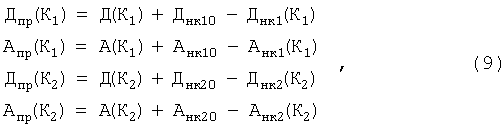
В случае наличия в накопленная блоком памяти (10) информации, полученной от двух наземных радиомаяков, что идентифицируется в блоке (11) по значению логического параметра РК (РК=0 при отсутствии переключения и РК=1 при наличии переключения), приведение к узловой точке выполняется отдельно для данных, полученных при работе с первым радиомаяком и для данных, полученных со вторым радиомаяком:
где  - номер точки оценки, полученной при работе с 1-м радиомаяком;
- номер точки оценки, полученной при работе с 1-м радиомаяком;
 - номер точки оценки, полученной при работе со 2-м радиомаяком;
- номер точки оценки, полученной при работе со 2-м радиомаяком;
 - вычисленные в НК значения азимута и дальности от точек оценки до радиомаяка №1;
- вычисленные в НК значения азимута и дальности от точек оценки до радиомаяка №1;
 - вычисленные в НК значения азимута и дальности от точки оценки К2 до радиомаяка №2;
- вычисленные в НК значения азимута и дальности от точки оценки К2 до радиомаяка №2;
 - измеренные по данным РСБН с учетом азимутальных поправок значения азимута и дальности от точек оценки К1 до радиомаяка №1;
- измеренные по данным РСБН с учетом азимутальных поправок значения азимута и дальности от точек оценки К1 до радиомаяка №1;
 - измеренные по данным РСБН с учетом азимутальных поправок значения азимута и дальности от точек оценки К2 до радиомаяка №2;
- измеренные по данным РСБН с учетом азимутальных поправок значения азимута и дальности от точек оценки К2 до радиомаяка №2;
 - вычисленные в НК значения азимута и дальности от узловой точки до радиомаяка №2 (
- вычисленные в НК значения азимута и дальности от узловой точки до радиомаяка №2 (
 ;
;
 - приведенные значения полярных координат относительно первого и второго радиомаяков.
- приведенные значения полярных координат относительно первого и второго радиомаяков.
Работа блока (11) заключается в следующем.
1. При наличии в массиве M1(К) данных относительно одного радиомаяка, поступающие с дешифраторов (41) и (43) логические параметры РК1 и РК равны нулю, соответственно на первые входы узлов элементов И поступают нулевые логические параметры, в этом случае независимо от номера точки оценки с выхода узла элементов И №5 (46) поступают на первый вход сумматора (48) значения Анк10 и Днк10 и с выхода узла элементов И №6 (47) Анк1(К1) и Днк1(К1) и в сумматоре (48) реализуется определение Дпр10(К1) и Апр1(К1) в соответствии с уравнениями (8).
2. При наличии в массиве M1(К) данных относительно двух радиомаяков логическая команда PK1, поступающая с дешифратора (41), равна нулю для точек оценки К1, а логическая команда РК равна 1 для всех точек оценки, в этом случае с узлов элементов И №3 (44) и №4 (45) поступают логические параметры, равные нулю, и с узлов элементов И №5 (46) и №6 (47) поступают значения Анк10, Днк10 и Анк1(К1), Днк1(К1), а в сумматоре №6 (48) в соответствии с первыми двумя уравнениями формул (9) вычисляются Дпр(К1) и Апр(К1); для точек оценки К2 логическая команда PК1 становится равной единице и с узлов элементов И №3 (44) и №4 (45) поступают логические параметры, равные единице, в этом случае с узлов элементов И №5 (46) и №6 (47) поступают значения Анк20, Днк20 и Анк2(К2) и Днк2(К2), а в сумматоре №6 (48) в соответствии с последними двумя уравнениями формул (9) вычисляются Дпр(К2) и Апр(К2).
3. Полученные изложенным способом значения приведенных полярных координат Апр(К) и Дпр(К), совместно с РК, L1, L2 и Анк10 и Днк10 поступают на выход, блока (11), которым является выход сумматора №6 (48).
В дешифраторе (12)(элементе сравнения) проверяется значение логического параметра РК и, если РК=1 (в M1(К) есть данные относительно двух радиомаяков) в работу устройства подключается блок формирования корректирующей информации (13), если РК=0 в работу устройства подключается блок выделения радионавигационной информации.
Блок формирования корректирующей информации (13) содержит, как видно из фиг 3, последовательно соединенные первый регистр сдвига (15), первый узел элементов И (19), первый сумматор (22), первый блок умножения (24) и первый узел элементов ИЛИ (26), последовательно соединенные второй дешифратор (17), второй узел элементов И (20), второй сумматор (23) и второй блок умножения (25), первый (16), второй (18), третий (27) и четвертый (28) селекторы, второй узел элементов ИЛИ (21), вход второго дешифратора подключен к второму выходу первого регистра сдвига, третий выход которого соединен со вторым входом второго узла элементов И, четвертый и пятый выходы - соответственно с входами первого и второго селекторов, первый вход второго узла элементов ИЛИ соединен с первым выходом второго селектора и вторым входом первого узла элементов ИЛИ, третий вход - с вторым выходом первого сумматора, четвертый вход - с вторым выходом второго сумматора, третий выход которого соединен с его вторым входом, третий вход - с выходом четвертого селектора, четвертый вход - с первым выходом второго блока умножения, третий вход первого узла элементов ИЛИ подключен к второму выходу второго селектора, четвертый вход - к второму выходу второго блока умножения, выход третьего селектора соединен со вторым входом первого сумматора, третий вход которого подключен к второму выходу первого блока умножения, четвертый вход - к третьему выходу первого сумматора, второй вход первого узла элементов И соединен с вторым выходом второго дешифратора, вход первого регистра сдвига является входом блока, входы третьего и четвертого селекторов и выход первого узла элементов ИЛИ являются двухсторонней связью блока, выход второго узла элементов ИЛИ является выходом блока.
Блок формирования корректирующей информации работает в два этапа. На первом этапе по совокупности замеров, выполненных с первым и вторым радиомаяками, выполняется определение полярных координат узловой точки относительно первого и второго радиомаяков соответственно:

Накопление  выполняется на первом сумматоре (22), на входе которого при РК1=0 (РК1=0 при
выполняется на первом сумматоре (22), на входе которого при РК1=0 (РК1=0 при  для формирования PK1 используется дешифратор №2 (17)) последовательно поступают значения Апр(К1) и Дпр(К1), завершение вычисления А1 и Д1 производится в блоке умножения №1 (24), где полученные суммы умножаются на
для формирования PK1 используется дешифратор №2 (17)) последовательно поступают значения Апр(К1) и Дпр(К1), завершение вычисления А1 и Д1 производится в блоке умножения №1 (24), где полученные суммы умножаются на 
Аналогично, но при PK1=1 (PK1=1 формируется в дешифраторе №2 (17) при  ) во втором сумматоре (23) и 2-м блоке умножения (25) определяются полярные координаты A2 и Д2 относительно второго радиомаяка. Вычисленные значения A1, Д1, А2, Д2 последовательно вместе с номерами каналов L1 и L2, признаком переключения радиомаяков РК, величинами азимута и дальности Анк10 и Днк10 узловой точки, измеренными в НК и поступающими на 1, 2, 3 и 4 входы узла элементов ИЛИ, передаются через блок (9) в НК. В НК способом, изложенным в [6] (см. раздел 2.3.2), определяются по двум дальностям, эталонные координаты узловой точки и по ним вычисляются эталонные значения A1E и А2Е азимутов относительно первого и второго радиомаяков.
) во втором сумматоре (23) и 2-м блоке умножения (25) определяются полярные координаты A2 и Д2 относительно второго радиомаяка. Вычисленные значения A1, Д1, А2, Д2 последовательно вместе с номерами каналов L1 и L2, признаком переключения радиомаяков РК, величинами азимута и дальности Анк10 и Днк10 узловой точки, измеренными в НК и поступающими на 1, 2, 3 и 4 входы узла элементов ИЛИ, передаются через блок (9) в НК. В НК способом, изложенным в [6] (см. раздел 2.3.2), определяются по двум дальностям, эталонные координаты узловой точки и по ним вычисляются эталонные значения A1E и А2Е азимутов относительно первого и второго радиомаяков.
На втором этапе производится вычисление и передача в блок (10) для запоминания азимутальных поправок:

Определение ΔА1 производится следующим образом: вычисленное в НК и поступающее через третий селектор (27) значение эталонного азимута A1Е относительно первого радиомаяка поступает на 2-й вход сумматора №1 (22), на 3-й вход этого сумматора с выхода первого блока умножения (24) поступает вычисленное значение азимута А1. В первом сумматоре реализуется определение в соответствии с (11) ΔА1 и передача его в второй узел элементов ИЛИ (21) на 3-й вход. По аналогичной схеме во втором сумматоре определяется и подается на четвертый вход второго узла элементов ИЛИ (21) величина азимутальной поправки ΔA2. Вычисленные значения азимутальных поправок вместе с соответствующими им номерами каналов радиомаяков L1 и L2, выделенных соответственно в первом (16) и втором (19) селекторах и поступающих на первый и второй входы передаются последовательно в блок (10).
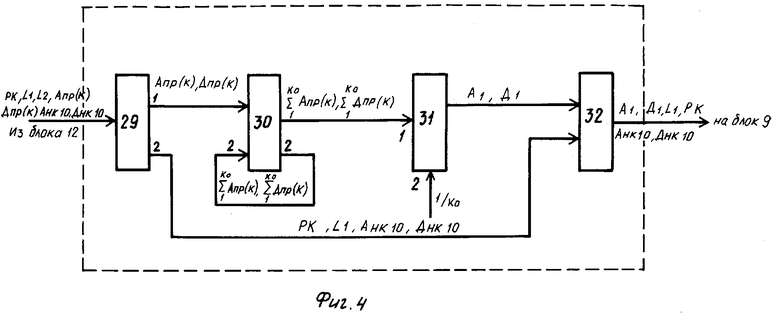
Блок выделения радионавигационной информации (14) содержит, как видно из фиг.4, последовательно соединенные пятый селектор (29), третий сумматор (30), третий блок умножения (31) и третий узел элементов ИЛИ (32), причем второй выход пятого селектора (29) соединен со вторым входом третьего узла элементов ИЛИ (32), а второй выход третьего сумматора (30) с его вторым входим, вход пятого селектора (29) являются входом блока, выход третьего узла элементов ИЛИ (32) является выходом блока.
При наличии в накопленном массиве данных M1(К) информации РСБН, полученной с одним радиомаяком в блоке (14), реализуется вычисление полярных координат узловой точки А1 и Д1 относительно этого радиомаяка и передача их в блок (9) вместе с L1, РК, Анк10 и Днк10, для чего информация, поступающая из блока (12), вводится в пятый селектор, на первый выход которого при К, изменяющемся от 1 до Ко (Ко может быть принято равным 99), последовательно выводятся и поступают на первый вход третьего сумматора величины Апр(К) и Дпр(К), в третьем сумматоре производится накопление  которые поступают на первый вход третьего блока умножения, где умножаются на 1/Kо и вычисляются значения А1 и Д1, и поступают на первый вход узла элементов ИЛИ из второго выхода пятого селектора поступает L1, РК, Анк10 и Днк10. Поступившая в третий узел элементов ИЛИ радионавигационная информация последовательно передается через блок (9) в НК.
которые поступают на первый вход третьего блока умножения, где умножаются на 1/Kо и вычисляются значения А1 и Д1, и поступают на первый вход узла элементов ИЛИ из второго выхода пятого селектора поступает L1, РК, Анк10 и Днк10. Поступившая в третий узел элементов ИЛИ радионавигационная информация последовательно передается через блок (9) в НК.
Блок сопряжения с НК (9) содержит, как видно из фиг.7, последовательно соединенные третий регистр сдвига (50) и девятый селектор (49) и четвертую группу элементов ИЛИ (51), соединен двухсторонней связью с НК через четвертую группу элементов ИЛИ (51) и третий регистр сдвига (50), двухсторонней связью с блоком (13), через первые входы девятого селектора (49) и четвертой группы элементов ИЛИ (51), входом в блок является второй вход четвертой группы элементов ИЛИ (51), выходом - второй выход девятого селектора (49).
В зависимости от значения РК, т.е. в зависимости от наличия в устройстве данных от одного или двух радиомаяков, блок сопряжения с НК работает в двух режимах:
- режим выделения радионавигационной информации (РК=0);
- режим формирования корректирующей информации (РК=1).
Блок сопряжения с НК (9) имеет двухканальную структуру. В первом канале информация из НК (A1Е, A2Е, Анк1, Днк1, Анк2, Днк2) поступает на третий регистр сдвига (50), последовательно соединенный с девятым селектором (49), где входной поток данных разбивается на два выходных: с первого выхода в режиме формирования корректирующей информации в блок (13) поступает значение А1Е и A2Е, со второго выхода на этапе накопления данных в обоих режимах работы блока (9) - в блок памяти (10) - поступает Анк1, Днк1, Анк2 и Днк2, причем в блок (13) в режиме формирования корректирующей информации А1Е и А2Е поступает только после смены каналов радиомаяков, т.е. через 10-30 минут полета, а в блок (10) - на этапе накопления радионавигационных данных - непрерывно с частотой 0,5-1 Гц, при этом в режиме выделения радионавигационной информации Анк2 и Днк2 не вычисляются. Во втором канале в режиме формирования корректирующей информации из блока (13) на первый вход четвертой группы элементов ИЛИ (51) подаются и выводятся в НК L1, L2, A1, Д1, A2, Д2, Анк10, Днк10, РК=1. Во втором канале в режиме выделения радионавигационной информации из блока (14) на второй вход четвертой группы элементов ИЛИ (51) поступают и выводятся в НК А1, Д1, L1, РК=0.
Причем из блока (13) информация поступает только после смены каналов радиомаяка, т.е. через 10-30 мин, а из блока (14) - по результатам обработки каждого накопленного массива М1(К), т.е. при Ко=99 через ˜ 50-100 с.
Способ формирования в НК по двум дальностям Д1 и Д2, эталонных величин азимутов А1Е и А2Е и способ вычисления Анк и Днк изложен в [6] (см. раздел 2.3.2).
Таким образом, в целом работа устройства определения и коррекции координат местоположения летательного аппарата сводится к следующему:
- с использованием известных блоков (1)-(8) выполняется радиотехническим способом выделение координат местоположения объекта;
- полученные данные уточняются и совместно с поступающими из НК измерениями накапливаются (блоки (10) и (9));
- выполняется приведение накопленных данных к узловой точке (блок (11));
- по совокупности измерений определяются и передаются в НК полярные координаты узловой точки, полученные либо при работе с одним радиомаяком (блоки (14) и (9)), либо при работе с двумя радиомаяками (блоки (13) и (9));
- при работе с двумя радиомаяками в НК изложенным в [6] (см. раздел 2.3.2.) способом по двум дальностям Д1 и Д2 вычисляются эталонные координаты летательного аппарата и соответствующие им значения азимутов А1Е, А2Е, которые по двухсторонней связи через блок (9) передаются в блок формирования корректирующей информации (13), где формируются и передаются в блок памяти для запоминания и дальнейшего использования для уточнения азимутов значения азимутальных поправок ΔА1 и ΔА2 и соответствующих им номеров каналов L1 и L2;
- полярные координаты узловой точки А1 и Д1 - при работе с одним радиомаяком и А1, Д1, A2 и Д2 - при работе с двумя радио-маяками передаются в НК вместе с соответствующими значениями полярных координат узловой точки Анк10 и Днк10, вычисленных по данным НК, корректирующие НК поправки (оценки) вычисляются сравнением А1 и Д1 с Анк10 и Днк10.
Таким образом, благодаря тому, что одновременно используются данные только с одного радиомаяка из-за исключения сложных блоков коммутации, позволяющих обеспечить работу сразу с несколькими радиомаяками (см. [4]), как это имеет место, например, в ДМЕ, достигается упрощение устройства, а использование при этом временной избыточности позволяет обеспечить достижение требуемой точности.
Отработка технического решения при проведении летных испытаний для оценки счисления НК показала, что координаты местоположения летательного аппарата получены с точностью, в 5-8 раз большей, чем точность применяемой испытуемым НК радиотехнической системы ближней навигации (тракт "борт-земля"). Применение изложенного технического решения по сравнению с базовой системой, за которую приняты ВТИ (см. [5]), для оценки счисления экспериментальных (опытных) образцов НК позволило следующее.
1. Исключить в ряде экспериментов для оценки НК данных внешнетраекторных измерений.
2. Полностью автоматизировать на наземной вычислительной системе оценку экспериментальных (опытных) образцов НК.
Применение изобретения в составе пилотажно-навигационного оборудования позволяет уменьшить количество параллельно действующих измерительных трактов, уменьшить требования к их быстродействию и одновременно увеличить точность коррекции.
Источники информации
1. Самолетная аппаратура радиотехнической навигации РСБН-6С. Техническое описание.
2. П.И.Дудник. Авиационные радиолокационные устройства. Издание ВВИА им. проф. Жуковского, 1976 г. Глава 16, стр. 410-442.
3. Изделие A-711. Руководство по технической эксплуатации ОЦ1.400.117.РЭ. Книга 1.
4. Материалы международной организации гражданской авиации (ИКАО), том. 1, июль 1972 г., стр.58-64 (10-е приложение).
5. Станция радиоконтроля "Кама-А". Техническое описание. № БТ1.401.037 ТО. Книга 1. 1961 г.
6. Летные испытания пилотажно-навигационных комплексов самолетов и вертолетов. - М.: Машиностроение. Раздел 2.3.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 1986 |
|
SU1412474A1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| СПОСОБ ЛЕТНЫХ ПРОВЕРОК НАЗЕМНЫХ СРЕДСТВ РАДИОТЕХНИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПОЛЕТОВ И УСТРОЙСТВА ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2011 |
|
RU2501031C2 |
| ПОМЕХОУСТОЙЧИВЫЙ БОРТОВОЙ ПРИЕМНИК РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ БЛИЖНЕЙ НАВИГАЦИИ | 2010 |
|
RU2427074C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 1984 |
|
SU1309741A1 |
| Бортовая система беспилотного летательного аппарата (БЛА) с автономной коррекцией координат | 2018 |
|
RU2703806C1 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |



Изобретение относится к области автоматики и вычислительной техники. Технический результат заключается в повышении точности определения, коррекции координат и упрощении устройства. Для этого устройство содержит наземные радиомаяки, радиоканал, приемопередающий блок, блок управления, блок измерения координат, блок сопряжения, также введены блок памяти, блок преобразования кодов, коммутатор, блок формирования корректирующей информации, блок выделения радионавигационной информации, дешифратор, первый и второй узлы элементов И. 7 ил., 2 з.п. ф-лы.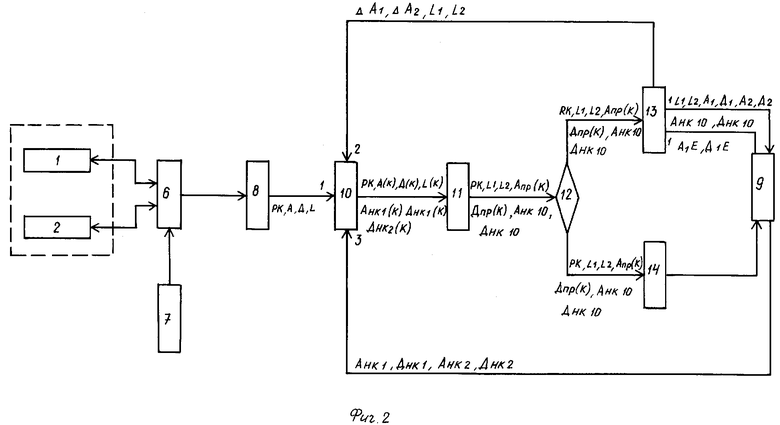
| ШТАНГЕН-ЦИРКУЛЬ С ВЫДВИЖНОЮ НОЖКОЮ | 1922 |
|
SU711A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Летные испытания пилотажно-навигационных комплексов самолетов и вертолетов | |||
| - М.: Машиностроение, 1979 | |||
| Материалы международной организации гражданской авиации (ИКАО), Том 1, июль 1972 г., стр | |||
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |

