о
Р о
о
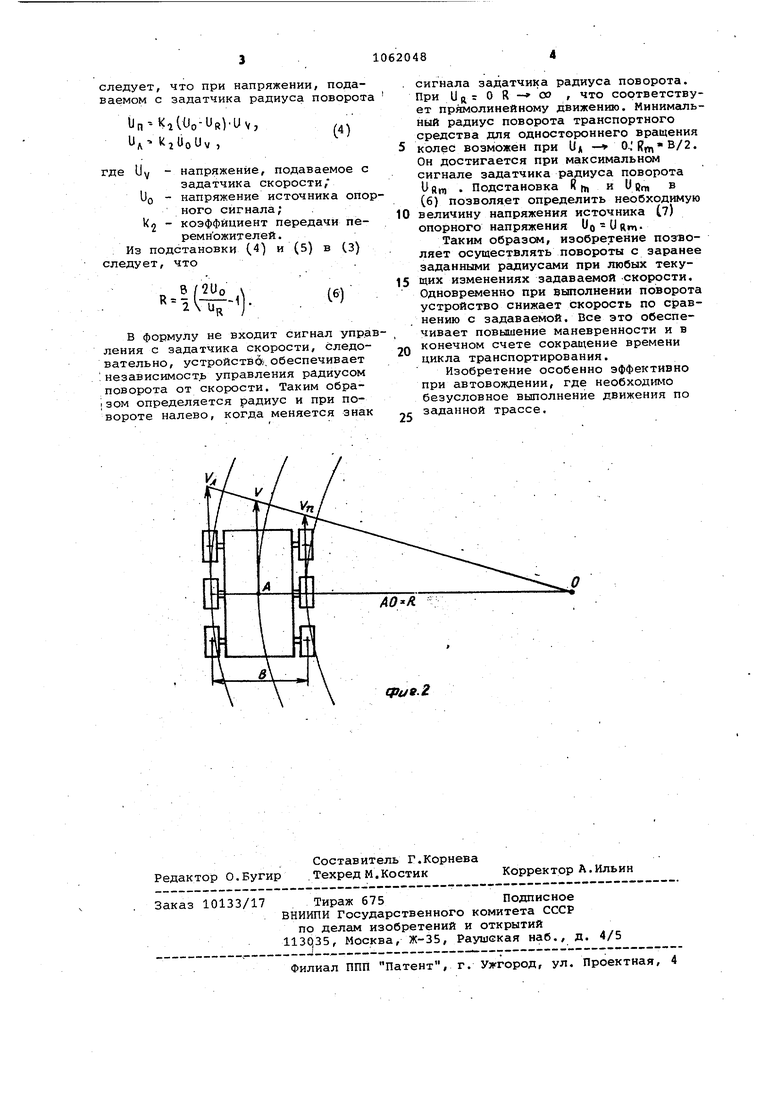
i(ik X) Изобретение относится к устройствам управления движением транспор ного средства с многодвигательным тяговым электроприводом движителей и может быть использовано в многодвигательном электроприводе с регулируемым соотношением частот вращения электродвигателей. Известно устройство для управления движением транспортного, средств с раздельными электроприводами колес правого и левого бортов, содержащее задатчики скорости и радиуса поворота, зыход последнего из которых через первый и второй развязывающие элементьа с первыми входами соответственно одного и дру гого сумматоров, связанных с приводами колес правого и левого 1 . Однако при таком управлении поворотом транспортного средства скорость и радиус поворота являются взаимосвязанными параметрами. Для выполнения поворота с одним и тем же радиусом при разных скоростях движения, требуется различное отклонепие рукоятки в сторону. Влияние скорости на радиус поворота требует от водителя повышенного вниглания при совершении сложных маневров из-за не обходимое TI} постоянно соизмерять задаваемую скорость .с задаваемым радиусом поворота. В автоматических транспортных средствах влияние скорости на радиус поворота приводит к усложнению вычислителя системы управления движением,.задаю щего радиус поворота по намеченной траектории движения на местности. Цель изобретения - повышение маневренности транспортного средства. Эта цель достигается тем, что устройство для управления движением транспортного средства с раздельными электроприводами колес правого и левого бортов, содержащее задатчики скорости и радиуса поворота, выход последнего, из которых соедине через первый и второй развязь1вающие элементы с первыми входами соответственно одного и другого сумматоров связанных с приводами колес правого и левого бортов, снабжено подключенным к другим входам первого и второго сумматоров .источником опорного напряжения и двумя перемножителями, первый вход каждого из к.оторых соединен с выходом соответствующего сумматора, второй - с выходом задатчика скорости, а выход с приводом колес соответствующего борта. На фиг. 1 приведена функциональн схема устройства; на фиг. 2 - графическая схема поворота транспортного средства, позволяющая уяснить аналитические формулы, приведенные ниже. Устройство (фиг. 1) содержит задатчик 1 скорости и задатчик 2 радиуса поворота, которые через развязывающие элементы 3 и 4 подключены к первым входам сумматоров 5 и 6, другие входы которых подключены к источнику 7 опорного напряжения, а выходы - к одним из входов перемножителей 8 и 9, другие входы которых подключены к задатчику 1 скорости, а выходы - к приводам 10 и 11 соответственно левого и правого бортов. Задатчик 2 радиуса поворота вырабатывает сигналы разной полярности. При положительной полярности сигнала рткрывается развязывающий элемент 4 (диод) и сигнал, поступающий на привСд 11 правого борта через сумматор 6 и перемножитель 9, уменьшается, а следовательно, уменьшается и скорость правого борта, благодаря чему осу14ествляется правый поворот. Если сигнал отрицательный, то открывается элемент .3 и аналогично осуществляется поворот влево за счет уменьшения скорости привода 10 левого борта. На фиг. 2-Vj - скорость левого борта} Yn скорость правого борта; В - база транспортного средства; R - радиус поворота. Из геометрических построений (фиг. 2 следует, что радиус поворота описывается .формулой 6 VT Для тяговых электроприводов с жесткими механическими и линейными регулировочными характеристиками справедливо соотношение v; K.U,, где V( - скорость -го борта (левого или правогоУ; К - коэффициент пропорциональ ности; И, - напряжение управления электроприводом ( -го борта, подстановки (2) в (1) следует В ии UA+UH Отсюда видно, что одновременное одинаковое изменение сигналов управления электроприводами приводит к изменению радиуса поворота (при ( 1( i Un ) Предлагаемое устройство исключает этот недостаток. Из функциональной схемы устройства (фиг. l)
следует, что при напряжении, подаваемом с эадатчика радиуса поворота
iJn-KiiUo-URVuv,
(Я
U.-kjUoUv,
где иу - напряжение, подаваемое с
эадатчика скорости, UQ - напряжение источника опорного сигнала;
2 коэффициент передачи перемножителей.
Из подстановки (.4) и (5) в (3) следует, что
V
(6) -г( формулу не входит сигнал управления с задатчика скорости, следовательно, устройств4. обеспечивает
:независимость управления радиусом поворота от скорости. Таким обраIзом определяется радиус и при повороте налево, когда меняется знак
сигнала задатчика радиуса поворота. При и R г О R - со , что соответствует прямолинейному движению. Минимальный радиус поворота транспортного средства для одностороннего вращения
колес возможен при 0..(„,« В/2. Он достигается при максимальном сигнале задатчика радиуса поворота Uftm . Подстановка R m и U в™ в (6) позволяет определить необходимую
величину напряжения источника С) опорного напряжения Uo UftmТаким образом, изобретение позволяет осуществлять повороты с заранее заданными радиусами при любых текущих изменениях задаваемой скорости. Одновременно при выполнении поворота устройство снижает скорость по сравнению с задаваемой. Все это обеспечивает повышение маневренности и в конечном счете сокращение времени цикла транспортирования.
Изобретение особенно эффективно при автовождении, где необходимо безусловное выполнение движения по
заданной трассе.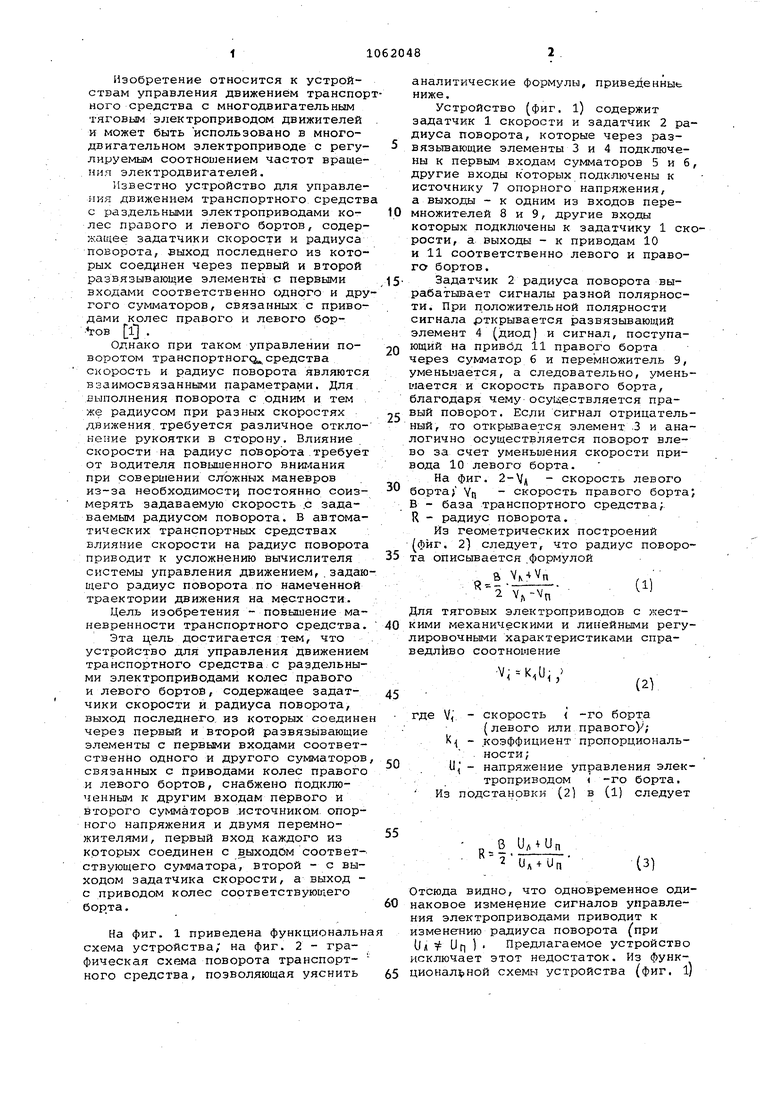
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| Рулевое устройство колесного транспортного средства | 1978 |
|
SU766941A1 |
| Рулевое управление транспортного сред-CTBA CO ВСЕМи упРАВляЕМыМи КОлЕСАМи | 1979 |
|
SU823206A1 |
| Тяговый электропривод переменного тока для транспортного средства | 1983 |
|
SU1185530A1 |
| Устройство управления транспортным средством | 1990 |
|
SU1766725A1 |
| САМОХОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1986 |
|
SU1441674A1 |
| Рулевое устройство транспортного средства со всеми управляемыми колесами | 1978 |
|
SU766942A1 |
| МНОГОДВИГАТЕЛЬНОЕ ЭЛЕКТРОТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ (ВАРИАНТЫ) | 2012 |
|
RU2513360C1 |
| Устройство для управления тяговым электроприводом автономного транспортного средства | 1984 |
|
SU1245456A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА с раэдельньши электроприводами колес правого и левого бортов, содержащее эадатчики скорости и радиуса поворота, выход последнего из которых соединен через первый и второй развязывающие элементы с первыми входами соответственно одного и другого сумматоров, связанных с приводами колес правого и левого бортов, отличающееся тем, что, с целью повышения маневренности, оно снабжено подключенньм к другим входам первого и второгр сумматорюв источником опорного напряжения и двумя перемножителями, первый вход каждого из которых соединен с выходом соответствующего сумматора, второй - с выходом задатчика скорости, а выход - с приводом колес соответствующего борта.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Поляризационный расходомер | 1986 |
|
SU1553831A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
