(54) СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления траекторией движения судна | 1980 |
|
SU908656A1 |
| Способ управления траекторией движения судна | 1978 |
|
SU724389A1 |
| Способ управления траекторией движения судна | 1982 |
|
SU1062129A1 |
| Способ управления движением судна | 1982 |
|
SU1066896A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2004 |
|
RU2263606C1 |
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| Способ управления движением судна при маневре | 1987 |
|
SU1633378A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2012 |
|
RU2509679C1 |
| Система автоматического управления судном | 1980 |
|
SU948772A1 |
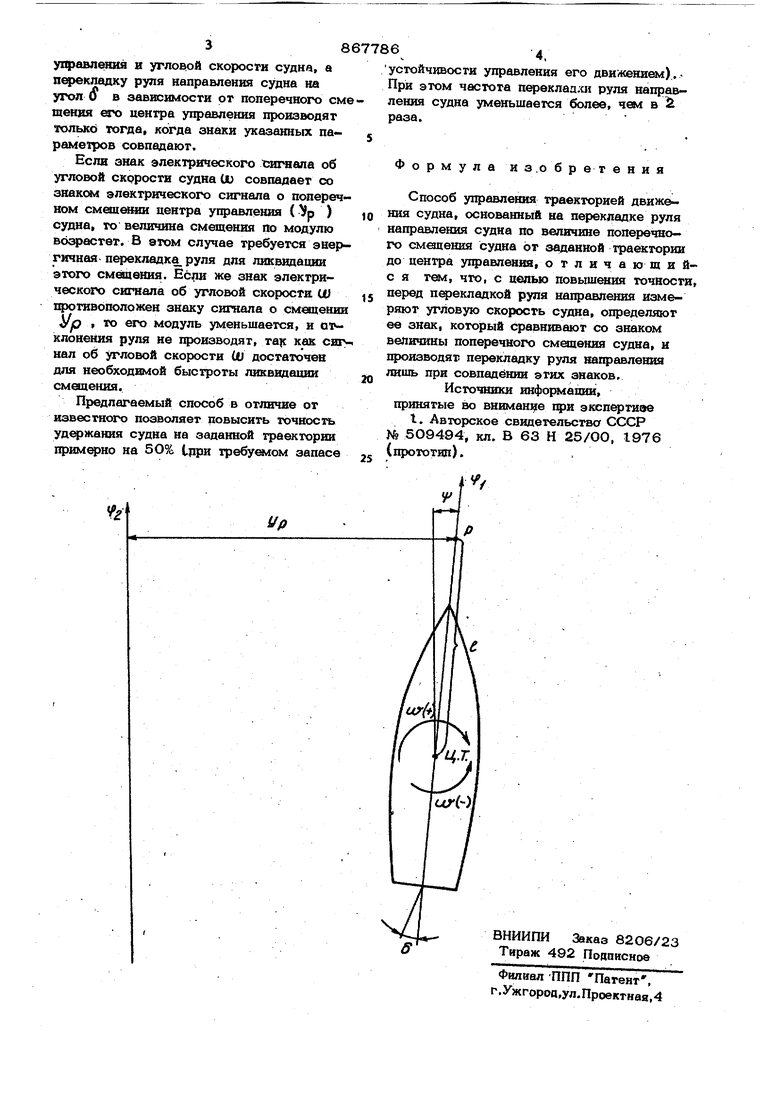
Изобрегение относится к технике управ ления движущимся судном, управляемым по величине поперечного смещения, от заданной траектории. способ управления траекторией движения судна, основанный на пере кладке руля направления судна по веяичиве поперечного смш1ения судна от заданной, траектории до центра управлешш Недостатком известного способа управления судном является то, что не учитывается угловая скорость судна, снижается точность удержания судна на заданной траектории.. Цель изобретения - повышение точности удержания судна на заданной тра мсторйи. Поставленная цепь достигается что перед перекладкой руля направления измеряют угловую скорость судна, опредепяют ее знак, который сравнивают со знакомвеличины поперечного смешения.суд.на, и производят перекладку руля направл.енвя лишь при совпадении этих знаков. На чертеже изображено положение судна относительно курса. Сущность способа заключается в следующем. Выб1фаюг впереди по курсу судна центр управления, например точку р (см. чертеж), находящуюся на расстояний от центра тяжести (Ц.Т.) судна, определяют путем пересчета изм ценных кинетических параметров движения судна величш1у поперечного сеченщ .Ур) от заданной траектории до центра (р) управления Б соответствии с зависимостью р-Чт-еч, рде Ч рассогласование курсовых углов А . соответственно судна и заданной траектории, измеряи юе датчиками. Эта зависимость верна достаточно. малых углах Ч . .Затем измеряют посредством датчика угловую скорость (ш) судна (относительно его центра тяжести Ц.Т.) и анализируют по знаку посредством схемы совпадения электрические сигналы о величине поперечного смещения центра 8 у1Ц)авления я угловой скорости судна, а перекладку руля направления судна на угол О в зависимости от поперечного см тения его центра управления производят только тогда, когда знаки указанных параметров совпадают. Если знак электрического /сигнала об угловой скорости судна (U совпадает со знаком электрического сигнала о поперечном смешении центра управления ( Vp ) судна, то величина смешения по модулю во астет. В этом случае требуется энер гичная-перекладка, руля для ликвидации этого смещения. Есщ же знак электрического сигнала об угловой скорости Ш противоположен знаку сигнала о смещении Ур его модуль уменьшается, и at клонения руля не производят, Taic как сиг нал об угловой скорости (и достаточен для необходимой быстроты ликвидации смацения. Предлагаемый способ в отличие от известнохчэ позволяет повысить точность удержания судна на заданной траектории на 5О% Срри требу лом запасе
V/
tfp
М
N
Ц-Т. 64, устойчивости управления его движением).При этом частота переклад;ш руля направления судна уменьшается более, чем в раза. Формула из.обретения Способ управления траекторией движения судна, основанный на перекладке руля направления судна по величине поперечного смвцения судна от заданной траектории до центра управления, о тличаюшийс я тем, что, с целью повышения точности, перед пфекладкой руля направпе1шя измеряют угловую скорость судна, определяют ее знак, который сравнивают со знаком величины поперечного смацения судна, и производят перекладку руля направления лишь при совпадении этих знаковг Источники информации, принятые во аюлйще 1фи экспертизе I. Авторское свндетельс1%сг СССР № SO9494, кл. В 63 Н 25/00, 1976 (прототип).
