(54) СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ СУДНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления судном | 1980 |
|
SU948772A1 |
| Способ управления траекторией движения судна | 1982 |
|
SU1062129A1 |
| Способ управления траекторией движения судна | 1978 |
|
SU724389A1 |
| Автоматическая система управления рулемСудНА | 1979 |
|
SU839859A1 |
| Способ управления траекторией движения судна | 1979 |
|
SU867786A1 |
| Система управления двухканатной грузовой дорогой между судами в море на ходу | 1974 |
|
SU600025A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СУДОВ ПРИ ГРУЗОПЕРЕДАЧЕ ТРАВЕРЗНЫМ СПОСОБОМ | 1971 |
|
SU428978A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ И СИСТЕМА ТРАВЕРЗНОЙ ПЕРЕДАЧИ СУХИХ И ЖИДКИХ ГРУЗОВ МЕЖДУ СУДАМИ НА ХОДУ | 2015 |
|
RU2584047C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
1
Изобретение относится к управлению движущимся объектом, в частности к управлению траекторией движения судна, принимающего груз при траверзной грузопередаче.
Известен способ управления траекторией движения судна, основанный на перекладке руля направления по величине поперечного смещения судна от заданной траектории до центра управления 1.
Однако при траверзной грузопередаче в известном способе не учитывается внешнее возмущение, действующее на судно, принимающее груз и вызывающее отклонение судна от заданной траектории.
Цель изобретения - повышение точности удержания принимающего груз судна на заданном расстоянии относительно траектории, задаваемой разгружаемым судном.
Для этого измеряют усилие в канатной дороге, установленной между разгружаемым и принимающим груз судами, по результатам измерений определяют разворачивающий момент принимающего груз судна, в соответствии с его значением производят дополнительную перекладку руля.
Сущность способа поясняется чертежом и заключается в следующем.
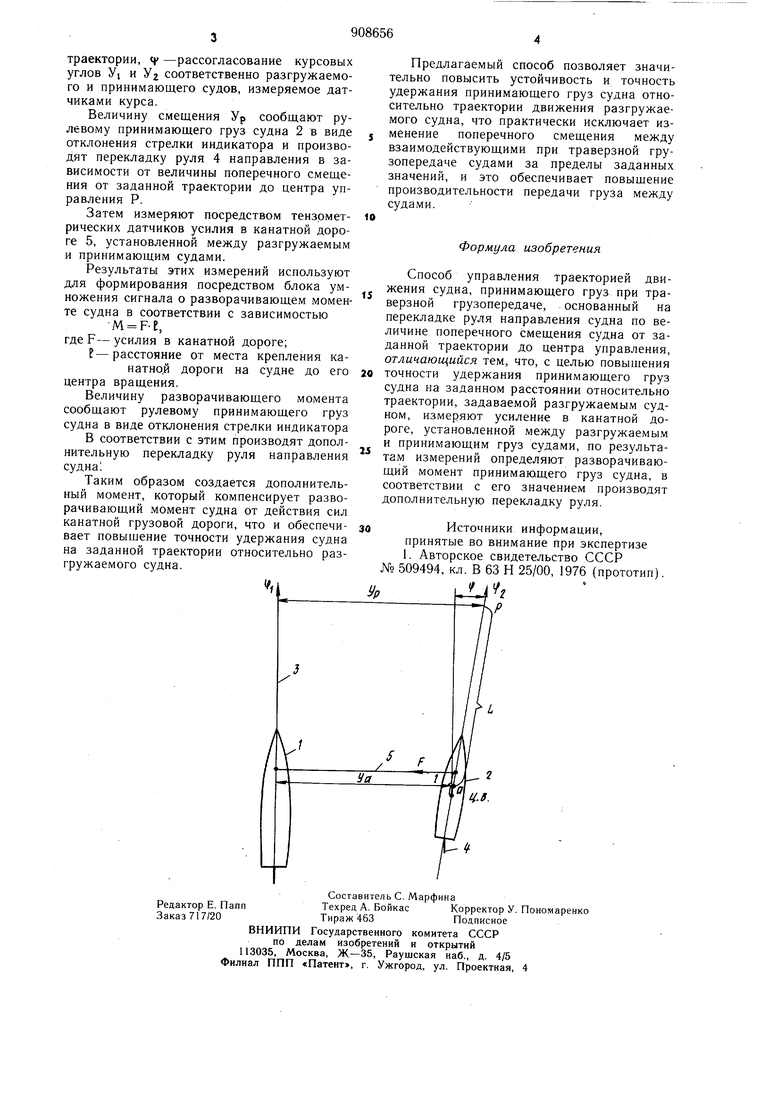
В случае совместного плавания двух судов при траверзной грузопередаче разгружаемое судно 1 является задатчиком траектории движения для принимающего груз судна 2 и любое изменение его движения по курсу влечет за собой изменение траектории движения принимающего груз судна.
to
Впереди по курсу судна 2 выбирают центр управления Р, определяют путем пересчета измеренных кинетических параметров его движения посредством датчика поперечного смещения и геометрического
15 построителя величину поперечного смещения Ур от заданной траектории 3 до центра управления в соответствии с зависимостью Ур iL Ч-о, верной при достаточно малых углах «j , где Уа - текущее измеряемое датчиком значение поперечного
° смещения объекта от заданной траектории, о1 -расстояние от центра управления Р до точки объекИ а, относительно которой производится измерение текущего значения поперечного смещения от заданной
траектории, v -рассогласование курсовых углов У и Уг соответственно разгружаемого и принимающего судов, измеряемое датчиками курса.
Величину смещения Ур сообщают рулевому принимающего груз судна 2 в виде отклонения стрелки индикатора и производят перекладку руля 4 направления в зависимости от величины поперечного смещения от заданной траектории до центра управления Р.
Затем измеряют посредством тензрметрических датчиков усилия в канатной дороге 5, установленной между разгружаемым и принимающим судами.
Результаты этих измерений используют для формирования посредством блока умножения сигнала о разворачивающем моменте судна в соответствии с зависимостью
M F-E, где F- усилия в канатной дороге;
Р-расстояние от места крепления канатной дороги на судне до его центра вращения.
Величину разворачивающего момента сообщают рулевому принимающего груз судна в виде отклонения стрелки индикатора В соответствии с этим производят дополнительную перекладку руля направления судна
Таким образом создается дополнительный момент, который компенсирует разворачивающий момент судна от действия сил канатной грузовой дороги, что и обеспечивает повыщение точности удержания судна на заданной траектории относительно разгружаемого судна.
Предлагаемый способ позволяет значительно повысить устойчивость и точность удержания принимающего груз судна относительно траектории движения разгружаемого судна, что практически исключает изменение поперечного смещения между взаимодействующими при траверзной грузопередаче судами за пределы заданных значений, и это обеспечивает повыщение производительности передачи груза между судами.
Формула изобретения
Способ управления траекторией движения судна, принимающего груз при траверзной грузопередаче, основанный на перекладке руля направления судна по величине поперечного смещения судна от заданной траектории до центра управления, отличающийся тем, что, с целью повыщения точности удержания принимающего груз судна на заданном расстоянии относительно траектории, задаваемой разгружаемым судном, измеряют усиление в канатной дороге, установленной между разгружаемым и принимающим груз судами, по результатам измерений определяют разворачивающий момент принимающего груз судна, в соответствии с его значением производят дополнительную перекладку руля.
0Источники информации,
принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 509494, кл. В 63 Н 25/00, 1976 (прототип).
Ур f
S
