(54) ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1970 |
|
SU355848A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Комплекс для технического обслуживания автомобилей | 1986 |
|
SU1346468A1 |
| ПОДЪЕМНИК ДЛЯ АВТОМОБИЛЕЙ | 1973 |
|
SU368184A1 |
| РЫЧАЖНАЯ ИНВАЛИДНАЯ КОЛЯСКА | 2015 |
|
RU2578800C1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU994286A2 |
| Роторный станок для сборки узлов с эластичной деталью | 1985 |
|
SU1256905A1 |
| Устройство для монтажа и демонтажа колес автомобилей | 1983 |
|
SU1232530A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |

I
Изобретение относится к автомобильному транспорту, а именно к подъемникам для вываливания автомобилей.
Известен подъемник для автомобилей, содержащий стойки, перемещаияциеся по ним каретки, снабженные, по крайней мере, двумя парами опорных роликов, тележки на которых установлены стойки, с управляеклм колесом, закрепленным на поворотном кронштейне, и нeyпpaвляe ыми колесами, механизм подъема стоек кинематически связанный с кронштейном f 1}.
Недостатком подъемника является неудобство использования его в эксплуатации, так как для подъема стоек и их спускания требуется приложение большой физической силы.
Цель изобретения - повышение удобства в эксплуатации путем уменьшения усилия на рукоятке.
Цель достигается тем, что поворот ный крониггейн управляемого колеса снабжен упорами, а механизм подъе- ,
ма стойки включает в себя вал с жестко смонтирован1Я 1М на нем кулачком, взаимодействупцим с одним из упоров поворотного кроншт на, и noaopOTfibiми рычагами, {шнематически свяэанш ми с неуправпяемыгш Kortecafei, причем другсй упор поворотного кронштейна подпружинен, а оси однсА из пар опорных роликов г1 фШ1рно закреппел) на каретке и со«1дине 1 между собой двуплечим рычагом.
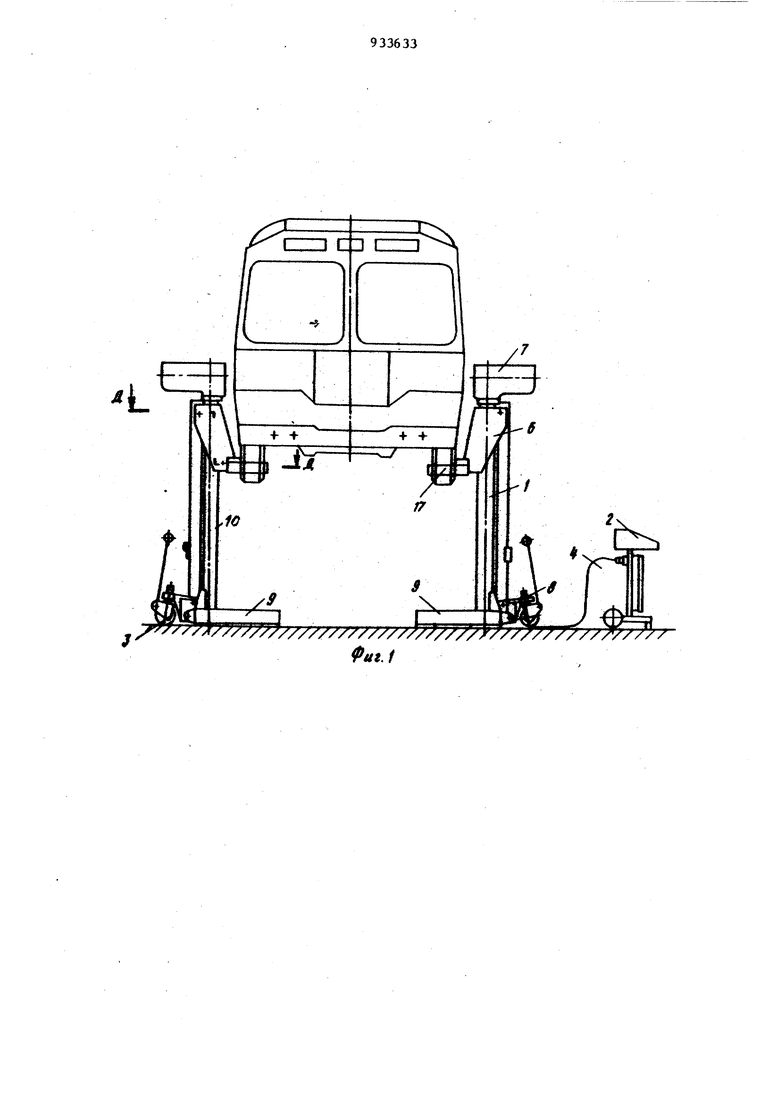
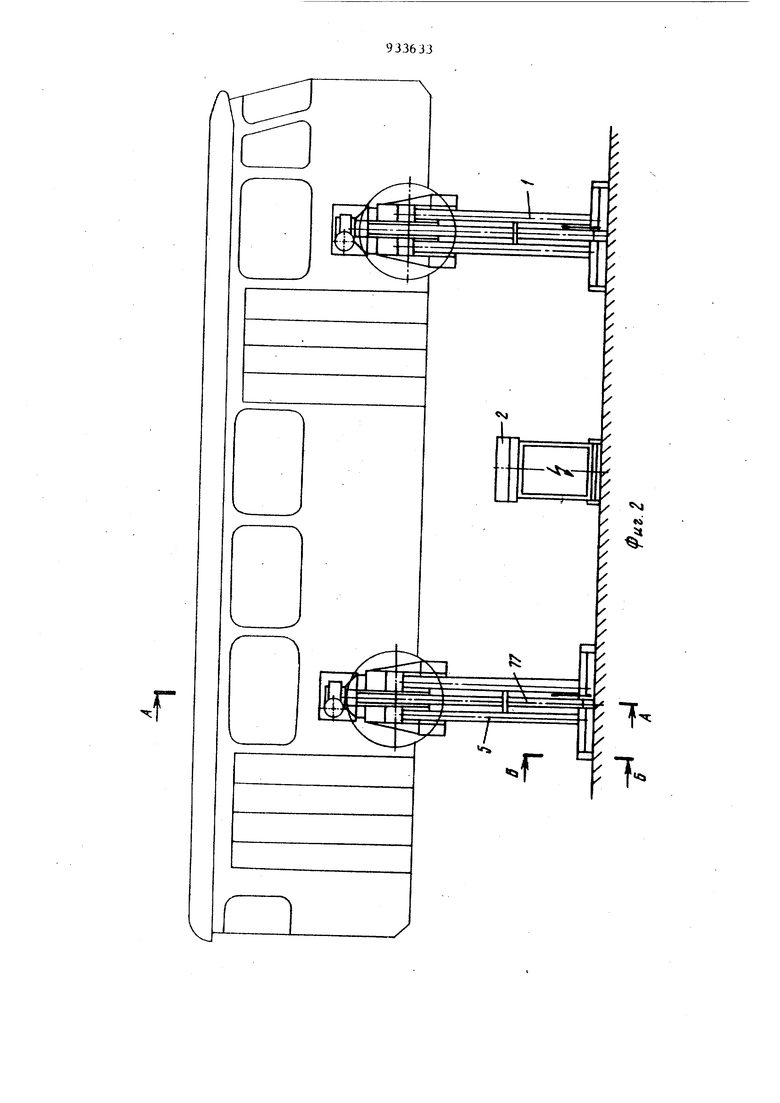
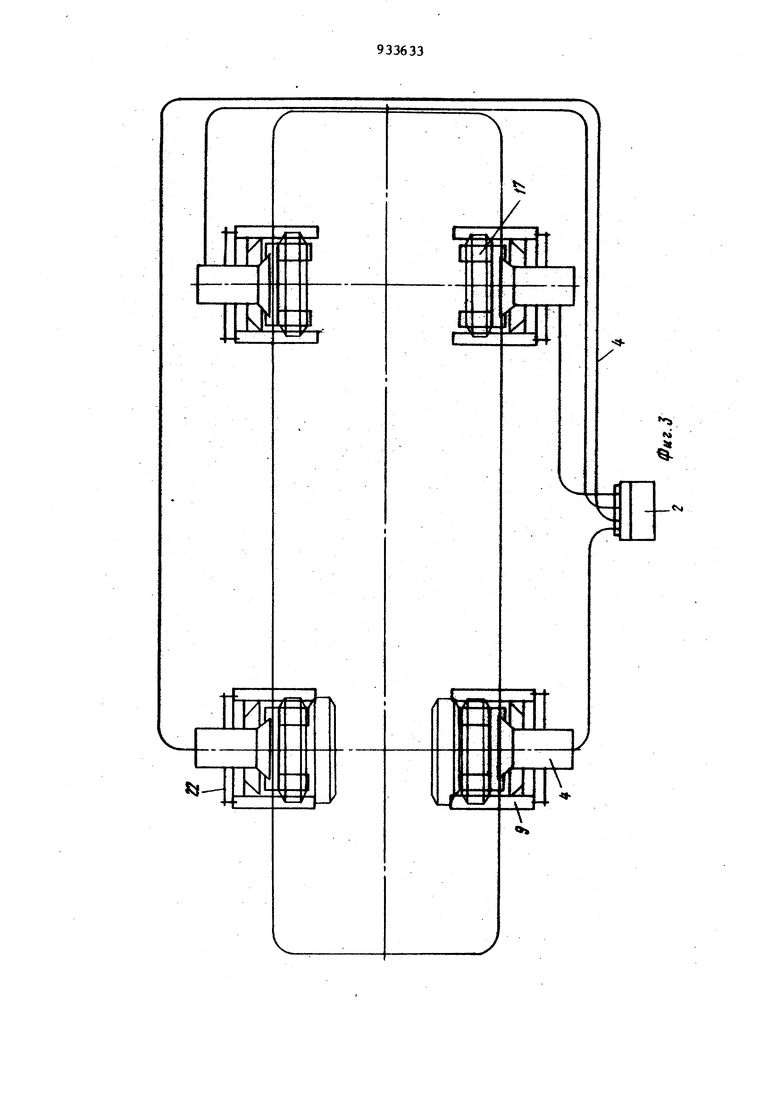
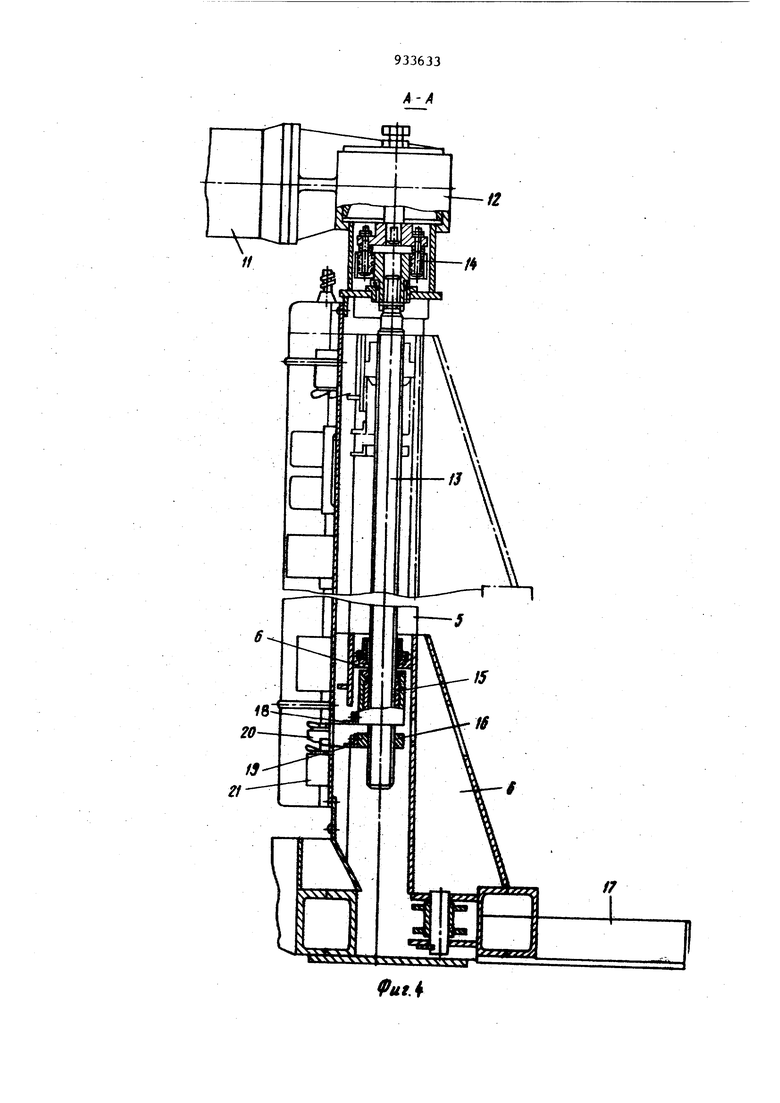
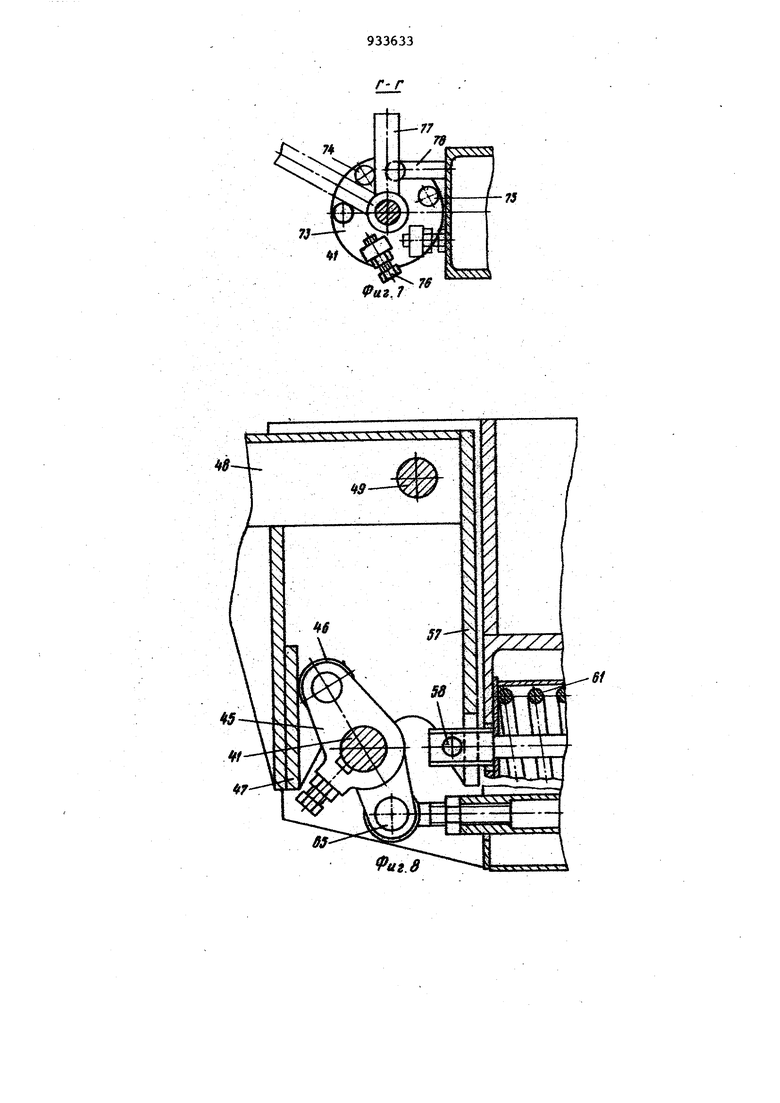
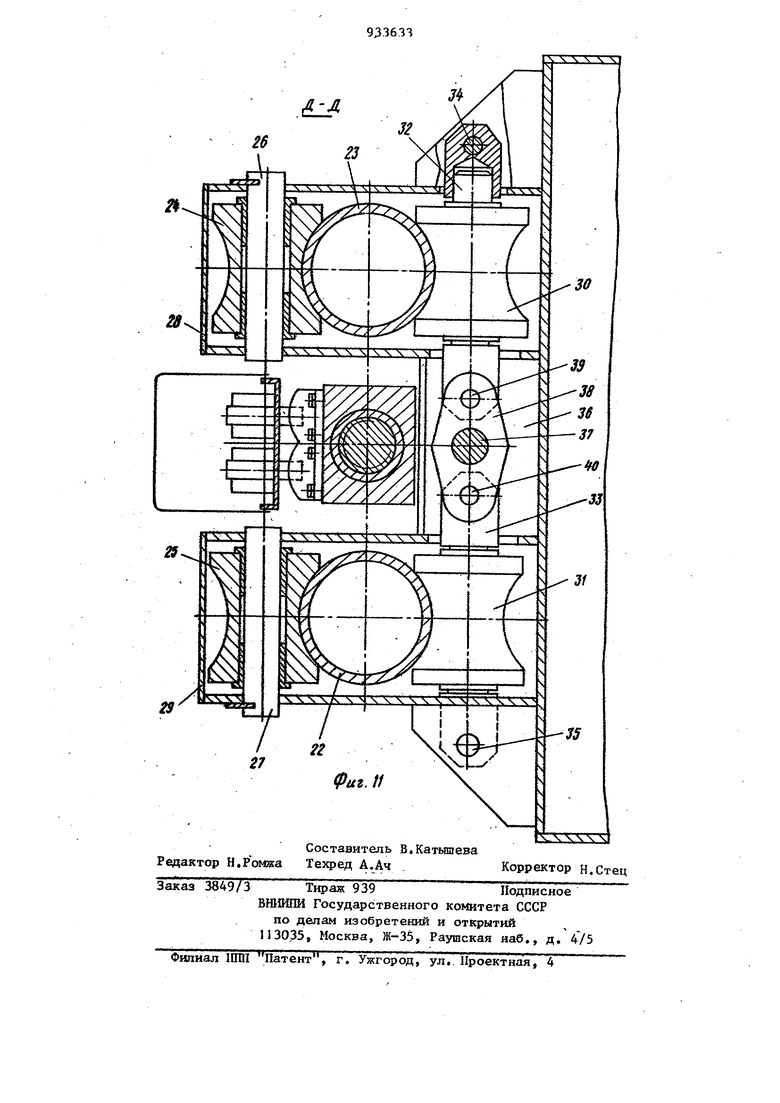
На фиг. 1 изображен подъемник, ш|д спереди; на фиг. 2 - то же, вид сбоку; на фиг 3 - то же, вид сверху, на фиг. 4 - сечение А-А на фиг. 2 на фиг. 5 - сечение Б-Б на 4«г. 2; на фиг. 6 - сечение В-В на фиг. 5; на г. 7 - сечение F-Г на фиг. 6, на фиг. 8 - положение подъемного механизма стайки прк невывешенном положений колес; на фиг. 9 - то же, при переходе через мертву1э точку, на фиг. 10 - то же, при вывешанном
39336334
положении колес на фиг. Н - сече-На вилке 50 смонтирована рукоятка 52.
ние Д-Д на фиг. I.Вилка 50 своей осью 53 входит во
Подъемник состоит из четырех сто-втулку 54 и упирается в шарик 55.
ек 1, пульта управления 2, тележекДля регулировки положения основания
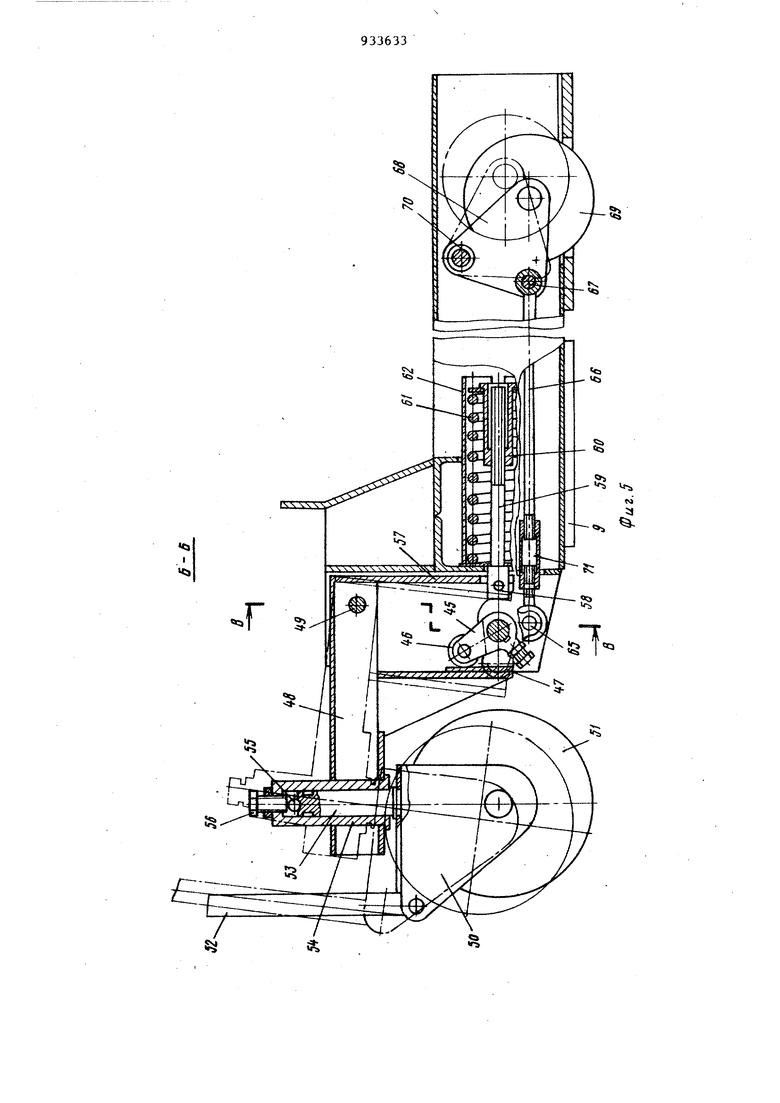
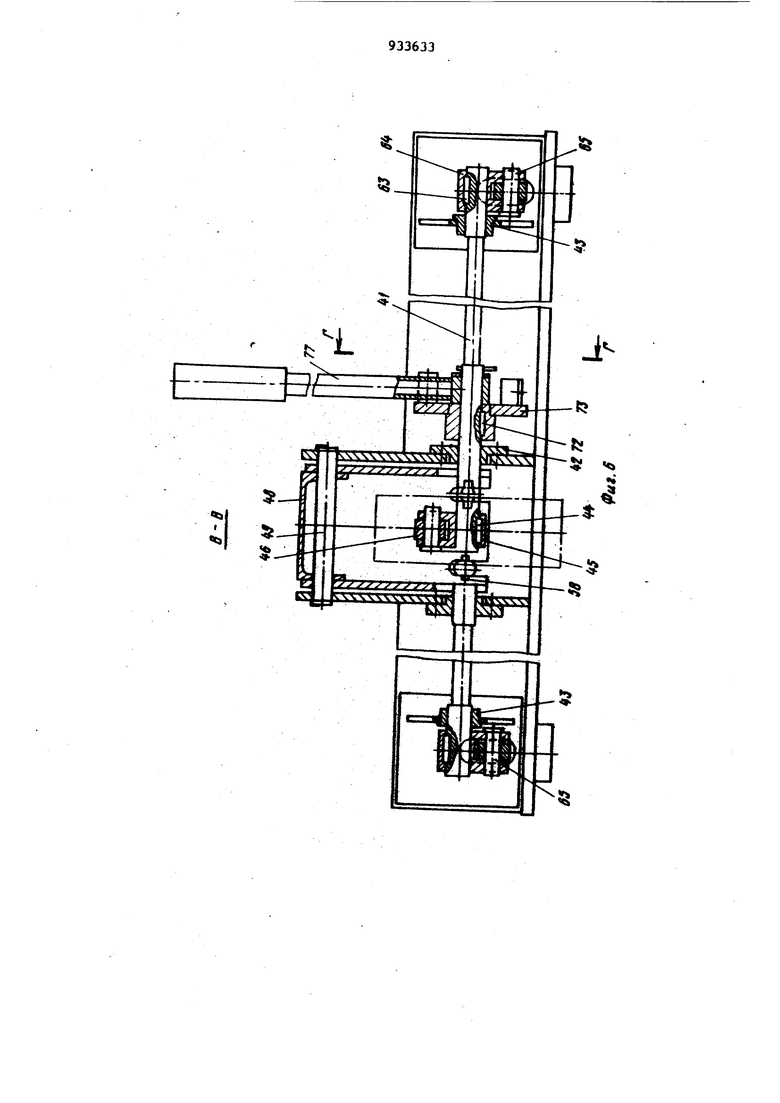
3 для подъема и опускания стоек элек- 5 стойки относительно управляемого котрических кабелей 4. Стойка подъемника 1 состоит из рамы 5, каретки 6, перемоцакяцейся по стойке, привода подъема кареток 7 и механизма подъема стойки 8. Рама стойки состоит из основания 9 и на- правлякяцих 10. Электромехагашеский привод подъема состоит из электродви гателя 11, редуктора 12 и грузового винта 13. Крутящий момент от редуктора на винт передается через муфту 14. По грузовому винту перемещается грузонесущая гайка 15 и страховочная гайка 16. На грузонесущую гайку опирается каретка 6, клыки 17 которой служат для подхвата под колеса автомобиля. На гайках 15 и 16 смонтирова упоры 18 и 19, взаимодействующие с конечными илключателями 20 и 21, огр шчиваюцими подъем и опускание карет ки и автоматически контролирующие за зор между рабочей и страховочной гай ками. Каретка 6 своими опорными ропи каю опирается на напрааляквще 22 и 23 (см.фиг.11).Верхние ролики каретки 24 и 25 на осях 26 и 27 жестко за крепле1а 1 в коробах 28 и 29 каретки. Нижние ролики 30 и 31 на осях 32 и 3 с помощью шарниров 34 и 35 закреплены на коробах 28 и 29. Короба соедииены между собой поперечинами 36, между которыми на оси 37 установлен двуплечий рычаг 38, с которым с помощью шарниров 39 и 40 соединемй оси 32 и 33 роликов 30 и 31. В случае разных размеров направля щих или мехсосе. размеров роликов 24 и 30 и 25 и 3, рычаг 38 повернет ся вокруг оси 37 до прижатия обоих роликов 30 и 31 к направлякнцим 22 и 23. Шарнирная установка роликов 30 и 31 обеспечивает равномерное рас пределеняе нагрузки на обе направляющие 22 и 23. Механизм подъема стойки состоит из центрального вала 41, установленного в опорах 42 и 43, в средней час ти которого на шпонке 44 смонтирован кулачок 45 с роликом 46, упирающимся в упор 47, смонтированный на поворотном кронштейне 48 вокруг оси 49, закрепленной на основании 9. Кронштейн 48 опирается на вилку 50 управляемого колеса 51 тележки 3. леса тележки служит болт регулировочный 56. Кронгатейн 48 упором 57 взаимодействует с упорами 58, установленны{«1 на концах штоков 59, другие концы которых снабжены регулируeM iNM гайками-упорами 60. Между гайком-упором 60 и стенкой основания 9 смонтированы пружины 6I в направляюсщх стаканах 62. На концах вала 41 смонтированы на шпонках 63 рычаги 64 шарнирно посредством осей 65, соединенные с тягами 66. Другие-концы тяг посредством осей 67 соединены шарнирно с вилками 68 неуправляегых колес 69 тележки. Вилки 68 шарнирно закреплены на основании 9 посредством осей 70. Для регулировки i положения неуправляемых колес служат регулировочные устройства 71. На валу 4 смонтирована посредством шпонки 72 втулка 73 с упорными пальцами 74 и 75иограничителымм болтом 76. На валу 4 шарнирно смонтирована рукоятка 77, взаимодействующая с пальца,ми 74 и 75. Для ограничения крайнего положения рукоятки слуяит упор 78. Пружины 61, упираясь в гайкуупор 60 через штоки 59 и упоры 58, прижимают упор 57 кронштейна к основанию 9. Кронште:йн 48 под действием пружины зашивает положение показанное на г. 8. Колесо 51 не вывешено. Неуправляемме колеса тележки 69 под достанем массы подъемника стремятся повернуться вместе с випкаьда 68 вокруг оси 70,но удерживаются тягаьш 66, через рычаги 64 и 41 кулачком 45, упираклцимися в упс 47 роликом 46. Момент на о кроиитейне 48 относительно оси 49, создаваемый усилием пружины больше, чем момент на кронштейне 48, создавae в Iй силами реакций на колеса 51 и 69, от веса стойки. При повороте оператором рукоятки 77 влево рукоят«а, упираясь в палец 74, поворачивает втулку 73, вал 41, кулачок 45 и рычаги 64. На повороте кулачка 45 ролик 46, перекатываясь по упору 47, поворачивает кронштейн 48 вокруг оси 49. Колесо 51 вывешивается. Пружины 61 сжимаются. После прохождения кронштейном мертвой точки напрадленне момента на валу 41, создаваемого прузхиной 61, меняется на противопапожное и совпадает с направлением момента, создава емого рукояткой 77 при повороте ее против часовой стрелки. Втулка 73 поворачивается от момента, создаваемого пружиной, а не от рукоятки 77 При повороте вала 41 вилки 68 под действием силы реакции колес 69 повернутся вокруг осей 70 и основа- кие 9 ляжет на пол. Такая конструкция втулки 73 исключает возможность удара рукояткой после преодоления кулачком мертвой точки. Дпя установки стойки на колеса тележки рукоятка 77 оператором поворачивается по часовой стрелке, упи раясь в палец 75, поворачивает втулку 73, вал 4, рычаги 64. Тяги 66 через оси 67 поворачивают вилки 68 вокруг осей 70. Кулачок 45, поворачиваясь в начале поворота до мертвой точки, перекатываясь роликом по упору 47, поворачивает кронштейн 48 вокруг оси 49 по часовой стрелке до мертвой точки.{ Положения когда плоскост.ь упора 47 станет перпевдикулярна радиусу, соединяющему ось вращения ролика и ось Поворота кулачка/. При этом пружина 61 сжимается. После преодоления мертвой точки кулачак поворачивается под действием момента создаваемого пружиной 61. При этом кронштейн 48 поворачивается относительно оси 49 против часовой стрелки Управляемое колесо опускается. Стойка вывешивается. Такая конструкция позволяет фикси ровать стойку как в вывешенном, так и в невывеиенном состоянии. Б случа если оператор забудет перед подъемом опустить стойку на основании при включении электроприводов при упоре клыков в колесо автомобиля Kcweса 69 утопятся в основание 9, повернувшись в вилках на осях 70. Тяги 66 через рычаги 64 повернут вал 41, кулачок 45 и втулку 73, Колесо 51 вывесится, повер гувншсь в вилке 50на кронштейне 48 вокруг оси 49, Подъемник работает следующим образом. Автомобиль своим ходом заезжает на гшощадку. Оператор вручную перекатывает стойки, подкатывая клыки под колеса автомобиля. Поворотом рукоятю 77 на себя колеса тележки 51и 69 вывешиваются. Стойки основа ни ем 9 опускаются -на поп. Пульт 2 кабелями 4 подсоединяется к стойкам. Включается электромеханический привод подъема кареток 7, Вращением винта 13 осуществляется подъем гайки 15, на которую опирается каретка 6. Осуществляется подъем автомобиля . Привод выключается отпускаш1ем кнопки или при достижеш1и упорами 18 и 19 коиечных выключателей. Опускание осуществляется иажатием на соответствующую кнопку на пульте управления. После опускания автомобиля оператор поворотом рукоятки 77 вывешивает стойку и откатывает ее от автомобиля, Применеш1е предлагаемого изобретения улучшит условия его эксплуатации , уменьиит усилия, необходимые уугя подъема и -опускания стоек, что, в свою очередь, позволит повысить производительность труда. Формула изобретения 1,Подъемник для автомобилей содержащий стойки, перемодающиеся по ним каретки, снабженные, по крайней мере, двумя парами опорных роликов, тележки,, на которых устаиовлеяы стойки, с управляемым.колесом, закрепленным на поворотном кронштейне, и неуправляемыми колесами, механизм подъема стоек кинематически связанный с крош1тейном, отличающийс я тем, что, с целью повышения удобства в эксплуатации путем уменьшения усилия на рукоятке, поворотный кронштейн управляемого колеса снабжен упорами, а механизм подъема стойки включает в себя вал с жестко смонтированным на нем кулачком, взаимодействующим с одним из упоров поворотного крошптейна, и поворотны(«1 рычагами, кинематически связанными сv неуправляемыми колесами, причем другой, упор поворотного кронштейна подпр5гжинен, 2,Подъемш1к по п I, о т л и чающийся тем, что оси (щноЛ из пар опорных роликов шарнирио закреплешл на каретке и соединены . между собой двупле шм рычагом. Источники информации, принятие во внимание при экспертизе i. Проспект фирмы SEFAC elevate urs etectromecaniquesa colonnes тоЬПез, Франция, 1979 (прототип).
г
|«
i Ttftb ut. f Г-Г
47
Ф1и.1в
