Изобретение относится к медицинской технике, а именно к устройствам измерения и регистрации с диагностическими целями, а также к устройствам для тренировки.
Известен эргометр-тренажер, содержащий основание,, две подвижные платформы для ног, индикатор проделанной работы 1.
Однако в известном устройстве величина перемещений площадок для ног ограничена предварительно установленными параметрами и не может изменяться в процессе проведения нагрузочного упражнения. Испытуемый может варьировать только частоту лага, не изменяя его длину, что ограничивает возможности испытуемого и не позволяет имитировать реальные условия ходьбы или бега. Кроме того, устройство отличается большими габаритами.
Наиболее близким к предлагаемому по технической- сущности является эргометр, содержащий установленные на основании блок нагружения с платформой и электроприводом, датчик движения, блоки управления, измерения и индикации (2.
Недостатком эргометра является то, что в нем не предусмотрена возможность измерения параметров движения с учетом веса испытуемого, что не обеспечивает достаточной точности измерения.
Цель изобретения - измерение параметров движения и работы с учетом веса испытуемого.
Поставленная цель достигается тем, что в эргометре, содержащем установленные на основании блок нагружения с платформой и электроприводом, датчик движения,блоки управления, измерения и индикации, в блок нагружения введены вторая платформа и второй электропривод, причем обе платформы установлены на направляющих рейках, а датчик движения выполнен в виде:установленных на основании концевьгх выключateлeй и установленных под каждой из платформ датчиков избыточного нагружения каждый из которых соединен с блоком управ ления, имеющим электромеханическую связь с блоком измерения, соединенным с блоком индикации, а электроприводы выполнены реверсивными и посредством концевых выключателей и датчиков избыточного нагружения блока управления соединены с источником электрической энергии.
Блок управления состоит из двух иден тичных электромеханических узлов, каждый из которых содержит первое реле с двумя парами контактов и второе реле с тремя (Тарами контактов, причем одна пара кон.тактов каждого реле нормально замкнутая, а остальные - нормально разомкнутые.
Кроме того, блок измерения содержит последовательно соединенные узел установки веса тела, генератор опорного сигнала, узел установки времени срабатывания и счетчик, соединенный с блоком индикации.
И генератор управл;яющего сигнала, через нормально разомкнутые контакты второго реле блока управления подключенный к второму входу узла установки времени срабатывания.
На фиг. 1. изображен эргометр, общий вид; на фиг. 2 - пример выполнения датчика избыточного нагружения; на фиг. 3 - структурная схема электромеханического узла блока управления; на фиг. 4 - структурная схема (блока измерения.
Устройство состоит из основания 1, двух платформ 2, двух электроприводов 3 с цепными передачами .4. Каждая соответствующая платформа 2 нижней своей поверхностью соприкасается с направляющими рейками 5 и механически соединена с цепной передачей 4. В каждой платформе 2 имеется датчик 6 избыточного нагружения, который может быть выполнен в виде подпружиненной пластины с микропереключателем, например, серии МП 5000 (фиг. 2). Верхняя поверхность пластины платформы 2 покрыта упругой ребристой накладкой (не показано) для лучщего сцепления с обувью испытуемого.
Блок 7 управления укреплен на основании 1 и состоит из двух идентичных электромеханических узлов (фиг. 3) для управления движением платформ 2, в,каждый из которых входят реле 8 с тремя парами контактов и реле 9 с двумя парами контактов. В каждом репе одна пара контактов нормально замкнутая, а Остальные - нормально разомкнутые. Эти реле могут быть реализо, ваны на базе реле типа РП-043.
Блок 10 измерения укреплен на основании 1. В состав блока 10 измерения (фиг. 4) входят генератор 11 опорного сигнала, узел 12 установки Ёеса тела, узел 13 установки времени срабатывания, счетчик 14,а также блок 15 индикации. Кроме того, в состав блока О измерення входит генератор 16 управляющего сигнала.
Узел 12 установки веса тела соединен с генератором П, последний - с входом .узла 13 установки времени срабатывания. Выход узла 13 установки времени срабатывания соединен со счетчиком 14, а последний - с блоком 15 индикации.
На основании 1 также укреплены концевые выключатели 17 и 18, например микропереключатели серии ПМ 5000, и стойка 19, на которой установлен блок 15.
Нормально разомкнутый контакт 20 микропереключателя датчика б избыточного нагружения электрически соединяется с общей шинйй 21 электрического тока через нормальйо замкнутый контакт 22 правого концевого выключателя 18, нормально замкнутый контакт 23 реле 9 и катушку реле 8, которая непосредственно связана с общей шиной 24 электрическогр тока.
Нормально замкнутый контакт 25 микропереключателя датчика б электрически соединен с общей шиной 21 через нормально замкнутый контакт 26 левого концевого выключателя 17, нормально замкнутый кон- , акт 27 реле 8 и катушку реле 9, которая также непосредственно связана с обш,ей шиной 24.
Каждый электропривод 3 имеет реверсивный электродвигатель, например однофазный асинхронный двигатель типа ABE07-С, который одним выводом соединен с общей шиной 24 переменного тока. Два других вывода электродвигателя соединены с общей шиной 21 через нормально разомкнутые контакты 28 и 29 реле 8 и 9. Нормально замкнутые контакты 27 и 23 реле 8 и 9 служат для предотвращения одновременного срабатывания обоих реле 8 и 9 В реле 8 имеется также нормально разомкнутый контакт 30.
. ,.-- ; :. . .20
Устройство работает следующим образом. --, -. .. - ,v
В исходном положении обе платформы 2 находятся спереди. (;на фиг. 1 слева), контакты 26 левого концевого выключателя 25 17 разомкнуты, катуц1ки реле 8 и 9 обесточены, нормально разомкнутые контакты 28 и 29 реле 8 и 9 отключают электродвигатели (не обозначены) электроприводов 3 от электрической сети. При этом электродвигатели не вращаются и платформы 2 неподвижны. 30.
Когда нога испытуемого становится на одну из платформ 2 и под действием силы веса нормально замкнутый контакт 25 микропереключателя датчика 6 размыкается, а нормально разомкнутый контакт 20 замы-. кает цепь питания катушки реле 8, нормаль- 35 но разомкнутый контакт 28 реле 8 соединяет обмотки возбуждения реверсивного электродвигателя с общей шиной 21 переменного тока и электродвигатель начинает вращать-. ся, перемещая с помощью электропривода 3 до и. цепной передачи 4 платформу 2 назад (на фиг. 1 справа) .В .конце пути движущаяся платформа 2 нажимает толкатель (не показан) концевого выключателя 18, что вызывает размыкание его контакта 22. В связи с этим катушка реЛе 8 обесточивается и его 45 нормально разомкнутый контакт 28 перехоит в разомкнутое состояние, отключая элект родвигатель от электрической сети, тем самЫм движение платформы 2 назад (на фиг. 1 справа) прекращается.
Если платформу 2 освободить от воз- ° ействия силы веса испытуемого, то размыкатся контакт 20, и контакт 25 переключатея датчика 6 замыкает цепь питания катушки р&че 9: контакт 29 реле 9 соединяет обмотки возбуждения реверсивного электро- 55 вигателя с общей шиной 21 переменного OKia таким образом, что электродвигатель ачинает вращаться в противоположном направлении, перемещая с помощью электропривода 3 и цепной передачи 4 платформу 2 вперед (на фиг. 1 слева). При достижении платформы 2 толкателя концевого выключателя 17 его контакт 26 размыкается, обесточивая катущку реле 9, при этом электродвигатель отключается от сети переменного токаи движение платформы 2 вперед прекращается.
Если при движении .платформы назад (на фиг. 1 справа) снять с нее ногу до отхода платформы-в крайнее правое положение, контакт 20 микропереключателя датчика 6 прерывает ток в цепи катушки реле 8, при этом контакт 28 реле 8 прерывает ток питания обмотки возбуждения электродвигателя, а контакт 25 микропереключателя датчика 6 замыкает цепь питания катушки реле 9, при этом контакт 29 реле 9 соединяет обмотку возбуждения электродвигателя с шиной 21 переменного тока таким образом, что происходит реверсирование вращения электродвигателя и изменение движения платформы 2 с направления назад на движение вперед.
Перед началом работы с помощью ,узла 12 установки веса тела в блоке 10 измерения вводят показатель, соответствующий весу испытуемого. При этом устанавливается определенная частота сигналов генератора 11. Затем испытуемый становится одной ногой на одну из платформ 2, которые в исходном положении неподвижны, например, на левую. При первом же шаге испытуемого увеличивается нагрузка на платформу 2 на которую опирается неподвижная нога, Пластина платформы 2 прогибается, при этом срабатывает датчик 6 избыточного нагружения, расположенный в соответствующей платформе 2, вызывает срабатывание соответствующего реле, которое обеспечивает включение электродвигателя электропривода 3, соотве.тствующего опорной ноге.
Через цепную передачу 4 в движение приводится платформа 2 опорной ноги, которая начинает перемещение назад по направляющим рейкам 5. В этот же момент срабатывания реле 8, один из параллельно включенны контактов 30 соединяет в блоке 10 измерения генератор 16 управляющего сигнала с узлом 13 установки времени срабатывания который начинает пропускать сигналы от генератора II на счетчик 14, показания которого выводятся на блок 15 индикации. Следующий шаг испытуемого заключается в опускании другой ноги на другую (правую) платформу 2 и снятии с левой платформы ноги, .ранее выполнявщий опорную функцию. Это приводит к тому, что ранее нагруженный датчик 6 избыточного нагружения левой платформы 2 освобождается от давления, при этом обесточивается реле 8, чем обеспечивается реверс электродвигателя электропривода 3, который с помощью цепной передачи 4 начинает перемещать освобожденную от нагружения левую платформу 2 вперед. Так как опорной стала нога, находящаяся на правой платформе, то соответственно срабатывает датчик 6 избыточного нагружения другой платформы 2 и соответствующее реле 8, которое включает электродвигатель электропривода 3, а последний через цепную передачу 4 перемещает правую платформу 2 назад. Одновременно замкнувшийся контакт 30 реле 8 в блоке 7 управления движением правой пл атформы включает в блоке 10 измерения подачу импульсов от генератора 11 на счетчик 14 и далее на блок 15. Таким образом обеспечивается поочередное равнонаправленное движение обеих платформ 2, частота которого управляется щагами испытуемого. Это позволяет производить исследование при любой частоте и амплитуде щага испытуемого. В соответствии с темпом ходьбы и с весом испытуемого меняется количество импульсов от генератора 11, поступающих на счетчик 14 и выводимых на блок 15 индикации, который показывает совершаемую испытуемым работу. Устройство может использоваться при эргометрии и тренировке как больных, так и здоровых лиц. Безопасность исследования на данном устройстве обеспечивается тем, что при усталости и утомлении испытуемый в любой момент может прекратить шагать, что сразу же приводит к полной остановке обеих платформ в крайнем заднем (на фиг. 1 правом) положении. Таким образом, данный эргометр-тренажер является биоупра-вляемым. Точность измерения в нем повышена за счет того, что при измерении параметров движения и работы учитывается вес испытуемого.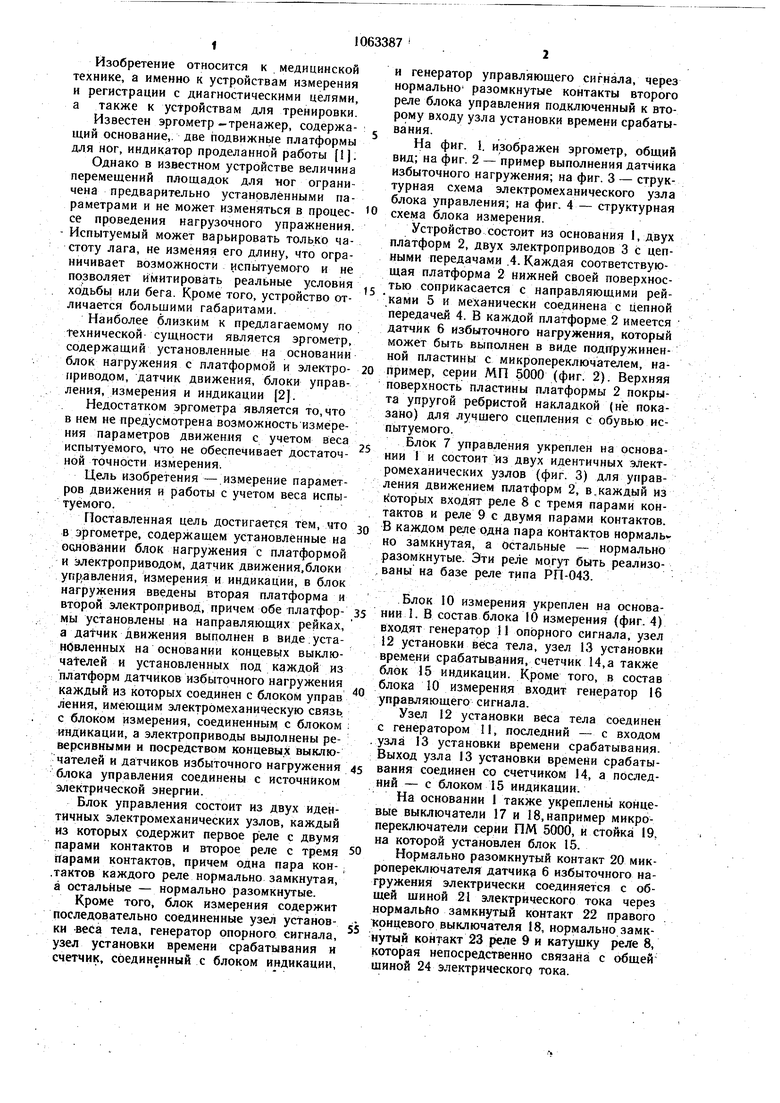


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещения приводного элемента микровыключателя | 1974 |
|
SU546774A1 |
| Устройство для испытания исполнительных механизмов протезов с электроприводами | 1976 |
|
SU598607A1 |
| Устройство для полива растений | 1978 |
|
SU952167A1 |
| Устройство для обнаружения сбоев микропереключателей | 1979 |
|
SU855613A1 |
| УСТРОЙСТВО ДЛЯ ОТКРЫВАНИЯ И ЗАКРЫВАНИЯ ДВЕРЕЙ | 1988 |
|
RU2025440C1 |
| Противоскатное устройство транспортного средства | 1984 |
|
SU1291469A1 |
| Тренажер по управлению судовой электростанцией и гребной электрической установкой | 1980 |
|
SU960903A1 |
| Противоскатное устройство транспортного средства | 1989 |
|
SU1654065A1 |
| Установка для ультразвуковой очистки пористо-капиллярных изделий с внутренней полостью | 1986 |
|
SU1327931A1 |
| ЭРГОМЕТР | 1990 |
|
RU2015684C1 |
1. ЭРГОМЕТР, содержащий уста: новлеииые иа основаиии блок нагружения с платформой и электроприводом, датчик движеиия, блоки управления, измерения и индикации, отличающийся тем, что, с целью измерения параметров движеиия и работы С учетом веса испытуемого, в блок нагружения введены вторая платформа и второй электропривод, причем обе платформы ус, тановЛены на направляющих рейках, а дат1 чик движения выполнен в виде установлен ных на основании концевых выключателей и установленных под каждой из платформ датчиков избыточного нагружения, каждый из которых соединен с блоком управления, имеющим электромеханическую связь с блоком измерения, соединенным с блоком индикации, а электроприводы выполнены реверсивными и посредством концевых выключателей и датчиков избыточного нагру жения блока управления соединены с источником электрнческрй энергии. , 2. Эргометр по п. Л, отличающийся теы, что блок управления состоит из двух идентичных электромеханических узлов, каждый из которых содержит первое реле с двумя ; парами контактов и второе реле с тремя i парами контактов, причем одна papa контактов каждого реле нормально замкнутая, остальные - нормально разомкнутые. 3. Эргометр по п. i, отличающийся тем, : что блок измерения содержит последователь:, но соединенные, узел установки веса тела, (Л i генератор опорного сигнала, узел установки времени срабатывания и счетчик, соединен- , ный с блоком индикации, и генератор управ- ; ляющего сигнала, через нормально разомкнутые контакты второго реле блока управ-, ления подключенный к второму входу узла установки времени срабатывания. о САР СС 00 
/ ////////////// /У // /Л 0-иЦ-г-0
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Эргометр-тренажер | 1975 |
|
SU593703A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Авторское свидетельство СССР ;МЬ 760946, кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| ) | |||
