зования перемещений вьетолнен в виде зубчатой рейки, закрепленной на плече параллелограммного механизма, жестко связанной с копирной пластиной и входящей в зацепление с валом шестерней,,установленным на маятнике с возможностью поворота вокруг собственной оси и жестко соединенны с установленным соосно на вале-шестерне шкивом, на котором закреплен один конец троса, другой конец которого закреплен на переключающем механизме, причем отношение диаметра шкива к диаметру делительной окружности вала-шестерни равно отнолению расстояния от точки шарнирного подвеса корпуса, до центра днообразующей кромки рабочего органа к расстоянию от точки шарнирного подвеса корпуса до точки контакта копирного стержня с копирной пластиной .
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Устройство для слежения за высотным положением рабочего органа землеройной машины | 1984 |
|
SU1209782A1 |
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 1970 |
|
SU269800A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1983 |
|
SU1139810A1 |
| Датчик глубины копания рабочего органа траншейного экскаватора | 1988 |
|
SU1652467A1 |
| Гидравлический демпфер для маятниковой подвески датчика положения рабочего органа землеройной машины | 1984 |
|
SU1173014A2 |
1. Датчик глубины копания рабочего органа дреноукладчика, содержа11и1й маятник, на котором закреплен переключающий механизм с механизмом его перемещения, связанный со щупом, и компенсатор сяаибки, включающий копирный стержень и копирную пластину и соединенный с механизмом перемещения переключающего механизма через блок преобразования механизма, от.л и чающийся тем, что, с целью повьлиения точности измерения глубины, компенсатор ошибки снабжен закрепленнйм шарнирно на рабочем органе дополнительным маятником, к которому посредством параллелограммного механизма прикреплена горизонтальная копирная пластина, копирный стержень закреплен жестко на.рабочем органе над копнрной пластиной с возможностью контактирования с ней, причем прямая, проходящая через точку контакта копирного стержня с копирной пластиной и точку шарнирного подвеса маятника, параллельна прямой, проходящей через центр днообразующей кромки органа и точку ширнирного подвеса корпуса. 2.Датчик поп. 1,отличающ и и с я тем, что -блок преобразования перемещений выполнен в виде двух потенциометров, жестко соединенных соответст-венно с копирным стержнем и с шарнирно подвешенным корпусом, при этом подвижная часть первого потенциометра жестко связана с копирной пластиной, подвижная часть второго потенциометра жестко связана с переключающим механизмом, а электрические выходы обоих потенциометров подключены к входу дифференциального усилителя, выход которого через электрогидравлический (Л распределитель соединен с механизмом перемещения переключающего мес ханизма. 3.Датчик глубины копания рабочего органа дреноукладчика, содержащий маятник, на котором закреплен переключающий механизм с механизмом его перемещения, связанный со щупом, и компенсатор ошибки, включающий копирный стержень и копирную пластину и соединенный с механизмом перемеО) щения переключающего механизма ел рез блок преобразования перемещений, отл ич ающий с я тем, что, с целью повышения точности измерения ОС глубины, копирная пластина закреплена горизонтально посредством параллелограммного механизма на маятнике , а копирный стержень закреплен жестко.на рабочем органе, над копирной пластиной с возможностью контактирования с ней, а точка контакта копирного стержня с копирной пластиной на прямой, проходящей через центр днообразующей кромки рабочего органа и точку шарнирного подвеса корпуса. 4.Датчик по п. 3, о т-л и ч аю щ и и с я тем, что блок преобра
1
Изобретение относится к строителному и дорожному машиностроению и представляет собой датчик глубины копания рабочего органа строительных и дорожных.машин, в частности дреноукладчиков, служащий для измерения глубины копанияи величины ошибки измерения глубины копания, при. изменении углового положения рабочего органа в пространстве, а также для компенсации этой ошибки.
Известно устройство для измерения глубины- копания, включающее фотоприемник, установленный на вертикальной стойке, образующей совместн с рамой рабочего органа экскаватора и двумя шарнирно присоединенными звеньями четнрехзвенный механизм, который позволяет компенсировать величину ошибки измерения глубины копания рабочего органа, вызванной изменением его углового положения в продольной вертикальной плоскости при выглублении и заглублении HiНедостатком данного устройства является то, что оно не позволяет компенсировать величину ошибки измерения глубины копания рабочего органа, вызванной изменением его углового положения в поперечной вертикальной плоскости при движении экскватора по трассе,
Известен датчик глубины копания рабочего органа дреноукладчика, содержащий маятник, на котором закреплен переключающий механизм с меха.низмом его перемещения, связанный со щупом, и компенсатор ошибки, включающий копирный стержень и копирную пластину и соединенный с механизмом перемещения переключающего механизма через блок преобразования перемещений ; J.
.Недостатком такого дatчикa является то, что даже при расположении датчика в продольной вертикальной плоскости симметрии рабочего оргайа раншейного экскаватора регист рация (еличины ошибки измерения глубины
копания осуществляется с некоторой погрешностью. При изменении углового положения рабочего органа как в поперечной так и в продольной вертикальных плоскостях появляется нескомпенсированная ошибка измерения глубины копания, которую невозможно устранить даже теоретически в силу геометрических соотношений, заложенных в кон.струкцию датчика. Эта ошибка существенно увеличивается и становится недопустимой в том случае, когда конструктивные особенности траншейного экскаватора не позволяют расположить датчик в продольной вертикальной плоскости симметрии рабочего органа. Последнее обстоятельство.приводит в конечном итоге к снижению точности выдерживания заданной глубины копания траншейного экскаватора.
Целью изобретения является повышение точности измерения глубины.
Поставленная цель по первому варианту достигается тем, что в датчике глубины копания, содержащем
5 маятник, на котором закреплен переключающий механизм с механизмом его перемещения, связанный со щупом, и компенсатор ошибки, включающий копирный стержень и копирную пластину и соединенный с механизмом перемещения переключающего механизма через блок преобразования перемещений, компенсатор ошибки снабжен закрепленным шарнирно на рабочем органе дополнительным маятгником, к которому посредством параллельного механизма, прикреплена горизонтально копирная пластина, копирный стерженЬ закреплен жестко на рабочем органе над копирной пластиной с возможностью контактирования с ней, причем прямая, проходящая через точку контакта копирного стержня с копирной пластичной и точку шарнирного подвеса маятника, параллельна прямой, про5 ходящей через центр днообразующей кромки рабочего органа и точку шарнирного подвеса корпуса. При этом блок преобразования перемещений выполнен в виде двух потенциометров, жестко соединенных соответственно с копирным стержнем и с шарнирно подвешенным корпусом,при этом подвижная часть первого потенциометра жестко связана с копирной пластиной, подвижная часть второго потенциометра жестко связана с переключающим механизмом, а электрические выходы обоих потенциометров подключены к входу дифференциального усилителя, выход которого через электрогидравлическцй распределитель соединен с механизмом перемещения переключающего механизма,
Кроме того, по второму варианту в датчике глубины копания рабочего органа дреноукладчика, содержащем маятник, на котором закреплен переключающий механизм с механизмом его перемещения,, связанный со щупом, и компенсатор ошибки, включающий копирный стержень и.копирную пластину и соединенный с механизмом перемещения переключающего механизма через блок преобразования перемещений, копирная пластина закреплена -горизонтально посредством параллельного механизма на маятнике, а копирный стержень закреплен жестко на рабочем органе над копирной пластиной с возможностью контактирования с ней,а точка контакта копирного стержня с копирной пластиной лежит на прямой, проходящей через центр днообразующей кромки рабочего органа и точку шарнирного подвеса корпуса. При этом блок преобразования перемещений выполнен ввиде зубчатой рейки, закрепленной на плече параллелограммного механизма, жестко связанной с копирной пластиной и входящей в зацепление с валом-шестерней, установленным на маятнике с возможностью поворота вокруг собственной оси и жестко соединенным с установленным соосно на вале-шестерне шкивом, на котором закреплен один конец троса, другой конец которого закреплен на переключающем механизме, причем отношение диаметра шкива к диаметру делительной окружности вала-шестерни равно отношению расстояния от точки шарнирного подвеса корпуса до центра днробразукнцей кромки рабочего органа к расстоянию от точки шарнирного подвеса корпуса до Точки контакта копирного стержня с копирной пластиной
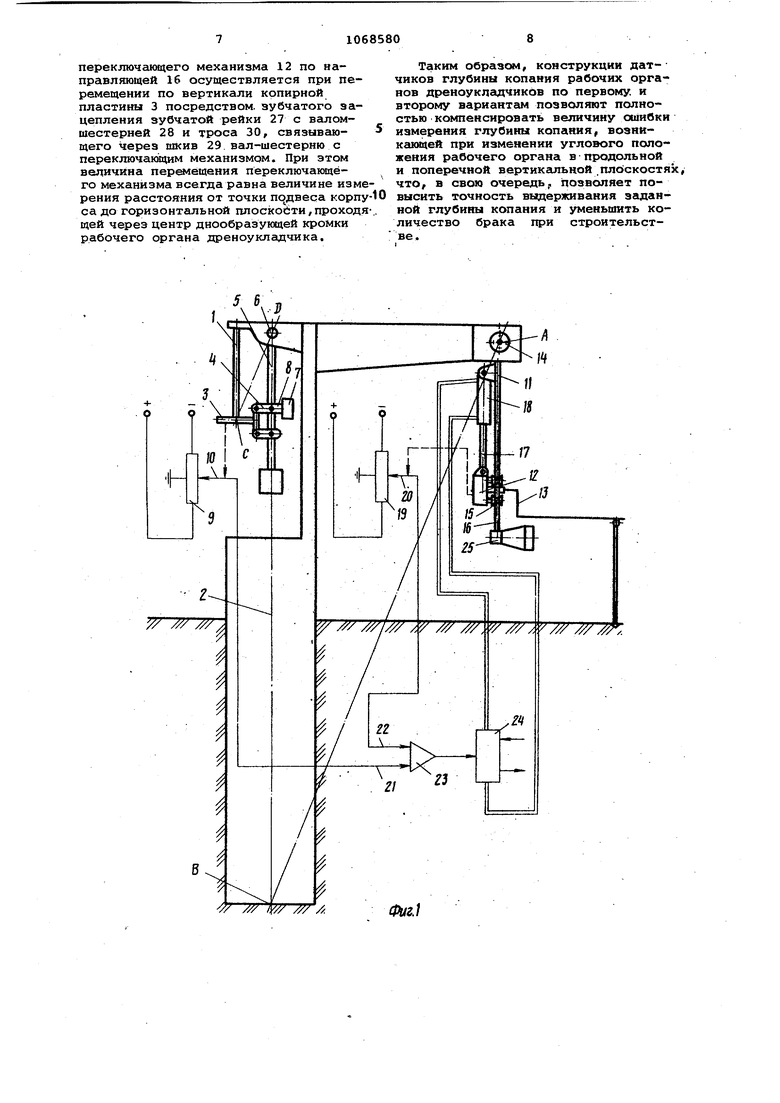
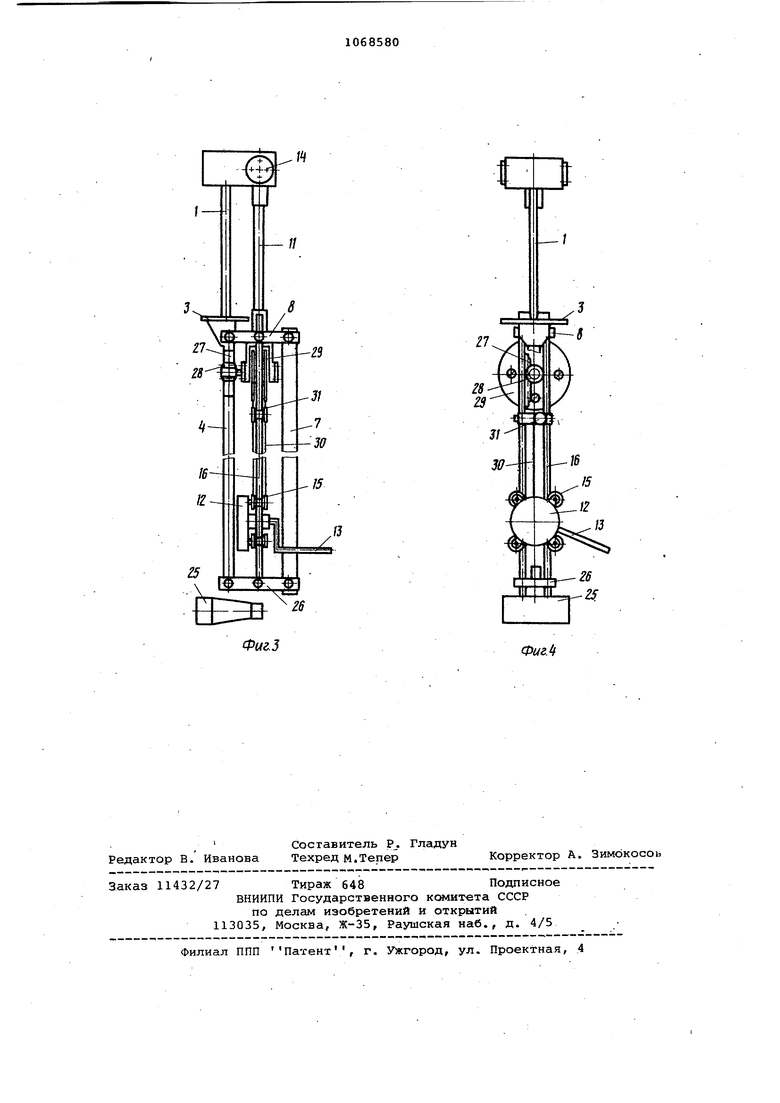
На фиг. 1 показана конструкция датчика по первому варианту и его установка на рабочем органе дреноукладчика; на фиг. 2 - конструкция датчика по второму варианту и его установка на рабочем органе дреноукладчика; на фиг. 3 - датчик глубины
копания, общий вид; на фиг. 4 - то же, вид слева.
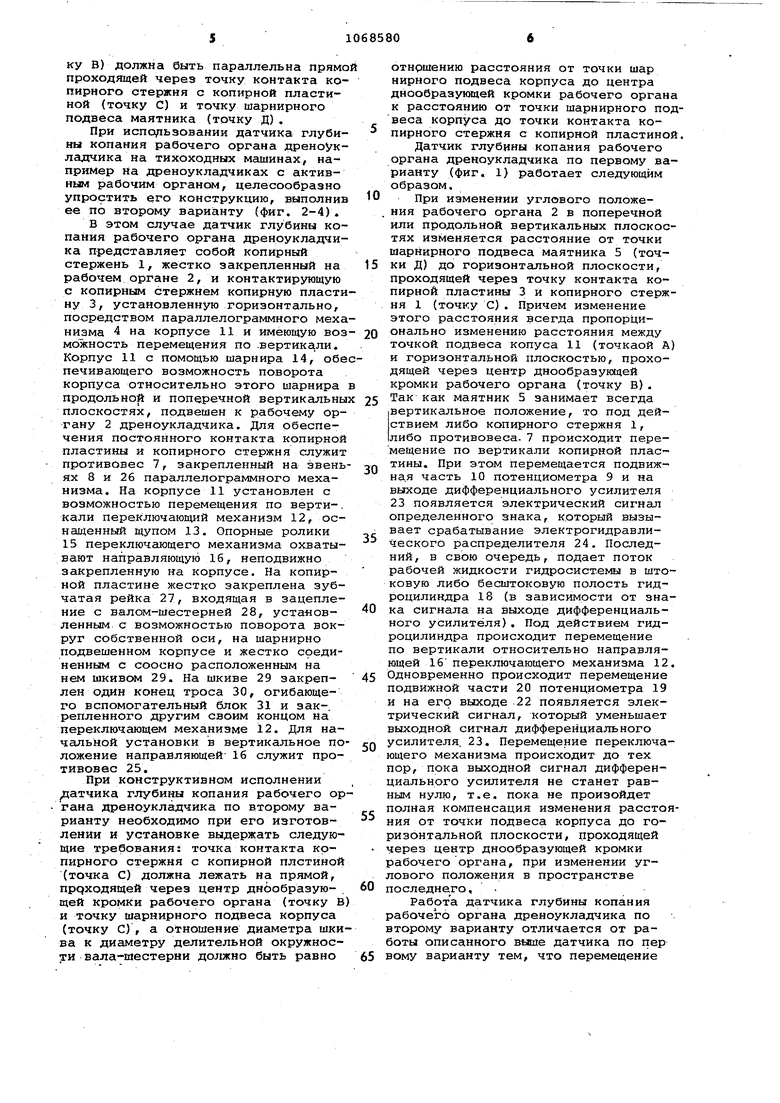
Датчик глубины копания рабочего органа дреноукладчика по первому варианту (фиг. 1) представляет собой
копирный стержень 1, жестко закрепленный на рабочем органе 2 дреноукладчика, и контактирующую с копир- . ным стержнем копирную пластину 3, установленную горизонтально посредством параллелограммного механизма 4 на маятнике 5 и имеющую возможность перемещения по вертикали. Маятник 5 с помощью шарнира 6, обеспечивающего возможность поворота маятника
относительно этого шарнира в продольной и поперченой вертикальных плоскостях, подвешен к рабочему органу 2 дреноукладчика и в его продольной вертикальной плоскости симметрии и
в месте наименьшего влияния на маятник инерционных помех. Для обеспе- . чения постоянного контакта копирной пластины и копирного стержня служит противовес 7, .закрепленный на звене
8 параллелограммного механизма 4. На маятнике 5 жестко установлен потенциометр 9, подвижная часть 10 которого также жестко связана с копирной пластиной 3. Корпус 11 с переключающим механизмом 12 и шупом
13 установлен на рабочем органе 2 посредством шарнира 14, обеспечивающего возможность поворота корпуса относительно этого шарнира в продольной и поперечной вертикальных
плоскостях. Переключающий механизм . 12 расположен на корпусе.с возможностью пер емещения по вертикгши. Для этой цели служат опорные ролики 15, охватывающие направляющую 16 корпуса. С переключающим механизме соединен шток 17 гидроцилиндра 18, цилиндр которого закреплен на корпусе 11. На корпусе 11 неподвижно установлен потенциометр 19, подвижная
часть 20 которого жестко соединена с переключающим механизмом.- Электрические выходы 21 и 22 потенциометров 9 и 19 соответственно подключены к входу дифференцигшьного усилителя 23, выход которого в свою очередь подключен к электрогидравлическому распределителю 24, служащему для управления работой гидроцилиндра 18. Для начальной установки в вертикальное положение направд1якицей
16 корпуса 11 служит противовес 25, закрепленный на корпусе. При конструктивном исполнении датчика глубины копания рабочего органа дреноукладчика по первому варианту необходимо
при начальной его установке на рабочем органе выдержать следующее требование: прямая, проходящая через точку шарнирного подвеса корпуса (точку А, фиг. 1) и цейтр днообразующей кромки рабочего органа (точку В) должна быть параллельна прямо проходящей череэ точку контакта копирного стержня с копирной пластиной (точку С) и точку шарнирного подвеса маятника (точку Д).
При испо71ьзовании датчика глубины копания рабочего органа дреноукладчика на тихоходных машинах, например на дреноукладчиках с активным рабочим органом, целесообразно упростить его конструкцию, выполнив ее по второму варианту (фиг. 2-4).
В этом случае датчик глубины копания рабочего органа дреноукладчика представляет собой копйрный стержень 1, жестко закрепленный на рабочем органе 2, и контактирующую с копирным стержнем копирную Пластину 3, установленную горизонтально, посредством параллелограммного механизма 4 на корпусе 11 и имеющую возможность перемещения по .вертикали. Корпус 11 с помощью шарнира 14, обепечивающего возможность поворота корпуса относительно этого шарнира продольной и поперечной вертикальны плоскостях, подвешен к рабочему органу 2 дреноукладчика. Для обеспечения постоянного контакта копирной пластины и копирного стержня служит противовес 7, закрепленный на звеньях 8 и 26 параллелограммного механизма. На корпусе 11 установлен с возможностью перемещения по верти-, кали переключающий механизм 12, осна111енный щупом 13. Опорные ролики 15 переключающего механизма охватывают направляющую 16, неподвижно закрепленную на корпусе. На копирной пластине жестко закреплена зубчатая рейка 27, входящая в зацепление с валом-шестерней 28, уста«овленным с возможностью поворота вокруг собственной оси, на шарнирно подвешенном корпусе и жестко соединенным с соосно расположенным на нем шкивом 29. На шкиве 29 закреплен один конец троса 30, огибающего вспомогательный блок 31 и закрепленного другим своим концом на переключающем механизме 12. Для начальной установки в вертикальное положение направляющей- 16 служит противовес 25.
При конструктивном исполнении
датчика глубины копания рабочего органа дреноукладчика по второму варианту необходимо при его изготовлении и установке выдержать следующие требования: точка контакта крпирного стержня с копирной плстиной (точка С) должна лежать на прямой, пррходящей через центр днообразующей кромки рабочего органа (точку В и точку шарнирного подвеса корпуса (точку С), а отношение диаметра шкива к диаметру делительной окружности вала-шестерни должно быть равно
отнршению расстояния от точки шар нирного подвеса корпуса до центра днообразующей кромки рабочего орган к расстоянию от точки шарнирного повеса корпуса до точки контакта копирного стержня с копирной пластино
Датчик глубины копания рабочего органа дреноукладчика по первому варианту (фиг. 1) работает следующим образом.
При изменении углового положения рабочего органа 2 в поперечной или продольной вертикальных плоскостях изменяется расстояние от точки шарнирного подвеса маятника 5 (точки Д) до горизонтальной плоскости, проходящей через точку контакта копирной пластины 3 и копирного стержня 1 (точку С). Причем изменение этого расстояния всегда пропорционально изменению расстояния между точкой подвеса копуса 11 (точкаой А и горизонтальной Плоскостью, проходящей через центр днообразунхцей кромки рабочего органа (точку В). Так как маятник 5 занимает всегда вертикальное положение, то под действием либо копирного стержня 1, либо противовеса. 7 происходит перемещение по вертикали копирной пластины. При этом перемещается подвижна.я часть 10 потенциометра 9 и на выходе дифференциального усилителя 23 появляется электрический сигнаьл определенного знака, который вызывает срабатывание электрогидравлического распределителя 24. Последний, в свою очередь, подает поток рабочей жидкости гидросистемы в штоковую либо бесштоковую полость гидроцилиндра 18 (в зависимости от знака сигнала на выходе дифференциального усилителя). Под действием гидроцилиндра происходит перемещение по вертикали относительно направляющей 16 переключающего механизма 12 Одновременно происходит перемещение подвижной части 20 потенциометра 19 и на его выходе 22 появляется электрический сигнал, который уменьшает выходной сигнал дифференциального усилителя. 23. Перемещение переключающего механизма происходит до тех пор, пока выходной сигнал дифференциального усилителя не станет равным нулю, т.е. пока не произойдет полная компенсация изменения расстония от точки подвеса корпуса до горизонтальной плоскости, проходящей через центр днообразующей кромки рабочего органа, при изменении углового положения в пространстве последне го,
Работа датчика глубины копания рабочего органа дреноукладчика по второму варианту отличается от работы описанного выше датчика по пер вому варианту тем, что перемещение
переключающего механизма 12 по направляющей 16 осуществляется при перемещении по вертикали копирной пластины 3 посредством, зубчатого зацепления зубчатой рейки 27 с валомшестерней 28 и троса 30, связывающего через шкив 29. вал-шестерню с переключакщим механизмом. При зтом величина перемещения переключающего механизма всегда равна величине измерения расстояния от точки подвеса корпу-Ю са до горизонтальной плоскости, проходя-., щей через центр днообразующей кромки рабочего органа дреноуклгщчика. V//
Таким образом, конструкции датчиков глубины копания рабочих органов дреноуклсщчиков по первому, и второму вариантсМ позволяют полностью Компенсировать величину ошибки измерения глубины копания, возникаквдей при изменении углового положения рабочего органа в продольной и поперечной вертикальной плоскостя что, в свою очередь,, позволяет повысить точность выдерживания заданной глубины копания и уменьшить количество брака при строительстве. /// Л
И
гз
26
Фи&.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4034490, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Чугунный экономайзер с вертикально-расположенными трубами с поперечными ребрами | 1911 |
|
SU1978A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ДАТЧИК ГЛУБИНЫ КОПАНИЯ РАБОЧЕГО ОРГАНА ТРАНШЕЙНОГО ЭКСКАВАТОРА | 0 |
|
SU269800A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| (прототип). | |||
