Изобретение относится к землеройной технике, в частности к многоковшовым траншейным дреноукладчикам и бестраншейньм дреноукладчикам с ножевым рабочим органом.
Цель изобретения - повышение эффективности работы устройства за сче уменьшения ложных срабатываний датчика.
На фиг. 1 изображено устройство, установленное на ножевом рабочем органе бестраншейного дреноукладчика, общий вид на фиг. 2 - то же, установленное на рабочем органе многоковшового траншейного дреноукладчика
Устройство содержит датчик 1 высотного положения, который установле на рабочем органе 2, который может быть выполнен, например, ножевым и многоковшовым, посредством кронштейна 3. На оси А датчика 1 закреплен направленный назад шарнирно-поворот- ный щуп 5, контактный элемент 6 которого опирается на копирньй трос 7, натянутый на кольш1ках 8, Угловое положение рабочего органа в продольной вертикальной плоскости определяется и неподвижной системе координат XOY начало которой находится на днообра- зующей кромке рабочего органа. Положение датчика 1 относительно рабочего органа 2 задано радиусом R и углом S для среднего положения рабочего органа. Угол поворота рабочего органа относительно среднего положения обозначен через tf . В среднем положении рабочего органа угол между коленом щупа 5 и копирным тросом 7 равен S, . Радиус колена щупа 5 обозначен через R,. В среднем положении рабочего органа, т.е. при q) О, контактный элемент 6 щупа 5 и днообразующая кромка рабочего органа находятся в одной поперечной вертикальной плоскости, в которой также лежит ось ординат OY.
Устройство работает следующим образом.
При повороте рабочего органа 2 на угол cf относительно центра в точке О изменение вертикального положения датчика 1 составляет ве
личину U. Y, которая с достаточной точностью определяется формулой
U Y R sin f| cos 8 (1)
Подъем датчика 1 на величину и Y сопровождается поворотом его корпуса на угол tp (что является следствием жесткого крепления датчика 1 к рабочему органу 2 в продольной вертикальной плоскости) и поворотом щупа 5 на угол cf, в неподвижной системе координат XOY. Зависимость угла Cf, от л Y с достаточной точностью определяется уравнением
uY R,-sin Q , . cos S, (2)
Из уравнений (1) и (2) следует, что угол Cf, равен углу (f при условии
R
cos
S, R
cos
(3)
которое выполняется в том случае, если контактный элемент 6 щупа 5 лежит в одной поперечной вертикальной гшоскости с днообразующей кромкой рабочего органа 2.
Равенство углов Cf, и qi означа- ет, что при изменении вертикального положения датчика 1 вследствие вращения рабочего органа вокруг точки О между щупом 5 и корпусом датчика 1 не будет происходить относитель- ного движения и на выходе датчика сигнала не будет, что и требуется для точного измерения высотного положения днообразующей кромки рабочего органа независимо от наклонов последнего в продольной вертикальной плоскости.
Таким образом, с помощью предлагаемого устройства становится возможным автоматическое -управление высотным положением рабочего органа машин без угловой стабилизации рабочего органа, на которых установка датчика на кронштейне с продольным шарниром крепления к рабочему органу невозможна из-за значительных продольных ускорений, вызывающих колебания кронштейна с датчиком в продольной плоскости.
Кроме того, предлагаемое устройство значительно увеличивает зону нечувствительности системы угловой стабилизации рабочего органа.
фиг.г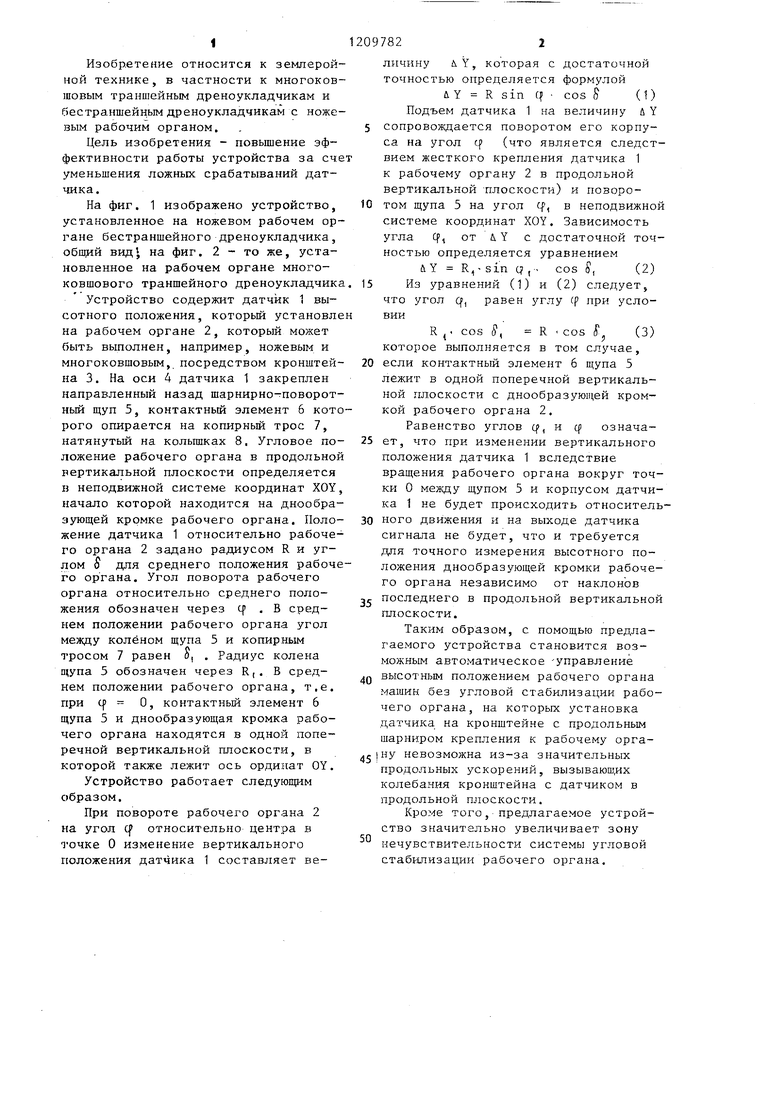
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик глубины копания рабочего органа дреноукладчика (его варианты) | 1981 |
|
SU1068580A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Датчик положения рабочего органа землеройной машины | 1984 |
|
SU1239232A2 |
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Датчик вертикального положения рабочего органа землеройной машины | 1985 |
|
SU1625961A1 |
| Устройство автоматического управления бестраншейного дреноукладчика | 1982 |
|
SU1063949A2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ВЫСОТНЫМ ПОЛОЖЕНИЕМ РАБОЧЕГО ОРГАНА ДРЕНОУКЛАДЧИКА | 2017 |
|
RU2650007C1 |
| Устройство для измерения высотного положения рабочего органа строительных и дорожных машин | 1979 |
|
SU863786A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| Автоматический регулятор землеройной машины | 1982 |
|
SU1120073A1 |

Редактор А.Козориз
Заказ 478/37Тираж 642 Подписное
ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ПИП Патент, г.Ужгород, ул.Проектная, 4
Составитель А.Петров
Техред Л.Микеш Корректор Т,Колб
| ДАТЧИК ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА К ЗЕМЛЕРОЙНО- ТРАНСПОРТНОЙ МАШИНЕ ДРЕНОУКЛАДЧИКУ12 | 0 |
|
SU306231A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Датчик положения рабочего органа землеройно-транспортной машины | 1980 |
|
SU901416A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
