Описываемое изобретение относится к многооперационным станкам-автоматам для изготовления трикотажных игл и других подобных изделий, выполненным в виде ряда формообразующих механизмов, обслуживаемых обп,ей автоматическоГ подачей для переноса заготовок.
По сравнению с известными автоматами того же назначения с винтовыми валиками для межоперационпой, транспортировки заготовок особенностями описываемой конструкции автомата, обеспечиваюпи1ми повышение производительности при отсутствии неуравповешепных механизмов, совершающих быстрое возвратно-поступательное перемещение, являются:
а)выполнение транспортных винтов1 1х валиков с кольцевыми витками по концам, индексирующими позиции загрузкп п съема заготовок с валиков, изготовление валиков с промежутками против формообразующих мехапизмов;
б)наличие механизма иереноса заготовок в промежутках, с остановками на осях формообразующих мехапизмов.
На фиг. I представлена в изометрической проекции кинематическая схема автомата; на фигурах 2, 3, 4, 5, 6 и 7 -различные иоложения механизмов автомата при перемеп1.епни ими заготовок.
Мащина приводится в движение от электродвигателя / ремнем 2 через вал с червяком .j на червячное колесо 4, насаженное на главном валу о.
От вала О вращение передается через щестерни 6. 7 и 6 валу .9,
11, J2 движение
а И1естернямп
передается валу 13.
Винтовые валики 14. приводятся в движеппе от вала 9 цепью через звездочки К) и 16 цилиндрическими шестернями 17, J8, 19, 20, спдяП1,имп на винтовых валиках.
Привод в движение клещеобразного захвата . укрепленного нп ползуне . и подающего изделия на обработку, производится от кулачка 3 через рычаг . Зажатие захватом изделия осуществляется посредством . Разжатие захвата происходит под влиянием унора 2 при возвратном движении ползуна 22.
Рейка с пружиппыми зажимам и расположенными на одной стойке. возвратно-поступательно перемещается вдоль нннтовых валиков 14, в промежутке между ними, получая движение от осевого кулачка i6 че. палец 2, рычаг 30, ползун н штЬк i):, прикрепленный к рейке.
Вертикальное перемещение рейки осуществляется двумя кулачками 33, сидящими на валу -5, через рычаги /W и стойки с направляющими 35.
Привод в движение ковочной головки 36 производится от вала 3 ремием 37. Движение прессов , 5.9 и 40 происходит от кулачков -.// через рычаги 42.
Вращение резцовой головки 43 осуп;,ествляется от вала J ремнем 44.
Работа автомата протекает следу юп,им образом.
Заготовки 45, уложенные на площадке 4(), подаются ползуном (на схеме не показан) к толкателю 47, который перемещается вертикально рычагом 48 от кулачка 4 и толкает заготовки поочередно в канавки винтовых валиков 14, но которым заготовки перемещаются к ковочной головке 36 и на другие операции. С валиков заготовки снимает левый пружинный зажим 50, расположенный па стойке рейки 27, и поднимает их на уровень подачи на операцию, где заготовки подхватываются и зажимаются захватом 2/и после опускания рейки 27 подаются на обработку.
После операций заготовки возвращаются захватом 21 в исходное положение, после чего они подхватываются правым пружинным зажимом 51, который, иеремещаясь с рейкой 27 вправо и вниз,, укладывает заготовки в канавки винтового валика.
Готовые изделия выдаются винтовыми валиками равномерно на площадку С)2.
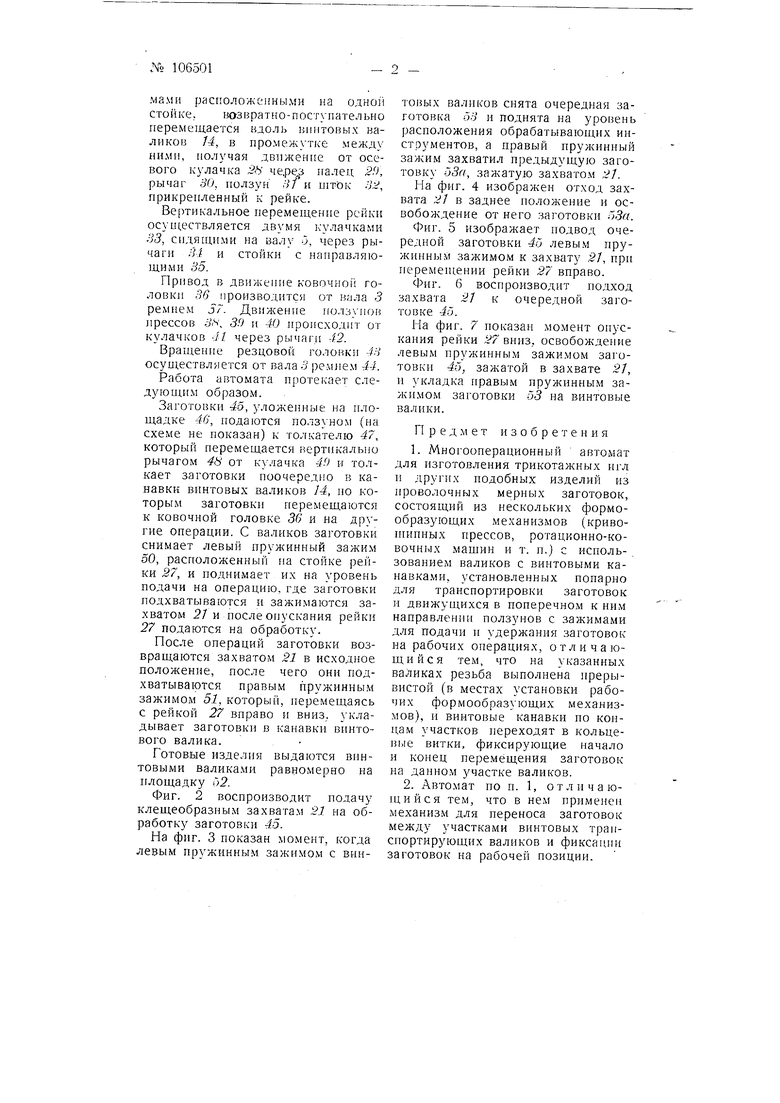
Фиг. 2 воспроизводит подачу клещеобразным захватам 21 на обработку заготовки 4.5.
На фиг. 3 показан момент, когда левым пружинным зажимом с виитовых валиков снята очередная заготовка -56 п поднята на уровень расположения обрабатывающих инструментов, а правый пружинный зажим захватил предыдущую заготовку у5г/, зажатую захватом 21.
На фиг. 4 изображен отход захвата 21 в заднее положение и освобождение от него заготовки Л5я.
Фиг. 5 изображает подвод очередной заготовки 4й левым пружинным зажимом к захвату 21, пр перемеп1.ении рейки 27 вправо.
Фиг. 6 воспроизводит подход захвата 21 к очередной заготовке 46.
На фиг. 7 иоказан момент оиускания рейки ,7 вниз, освобождение левым пружинным зажи.мом заготовки 46, зажатой в захвате 21, и укладка нравым пружинным зажпмом заготовки -55 на винтовые валики.
Предмет изобретения
1.Многооперационный автомат для изготовления трикотажных игл п других иодобных изделий из проволочных мерных заготовок, состоящий из нескольких формообразующих механизмов (кривоП1ИПНЫХ прессов, ротационно-ковочных машин и т. п.) с использование.м валиков с винтовыми канавка.ми, установленных попарно для транспортировки заготовок и движущихся в поперечном к ним направлении ползунов с зажимами для подачи и удержания заготовок на рабочих операциях, отличающийся тем, что на указанных валиках резьба выполнена прерывистой (в местах установки рабочих формообразующих механизмов), и винтовые канавки но концам }частков переходят в кольцеBi,ie витки, фиксирующие начало и конец перемещения заготовок на данном )частке валиков.
2.Автомат по п. 1, отличающийся тем, что в нем применен механизм для переноса заготовок между участками винтовых транспортирующих валиков и фиксации заготовок на рабочей позиции.
1
Фиг. 2
Фиг. 3
53а Si 2т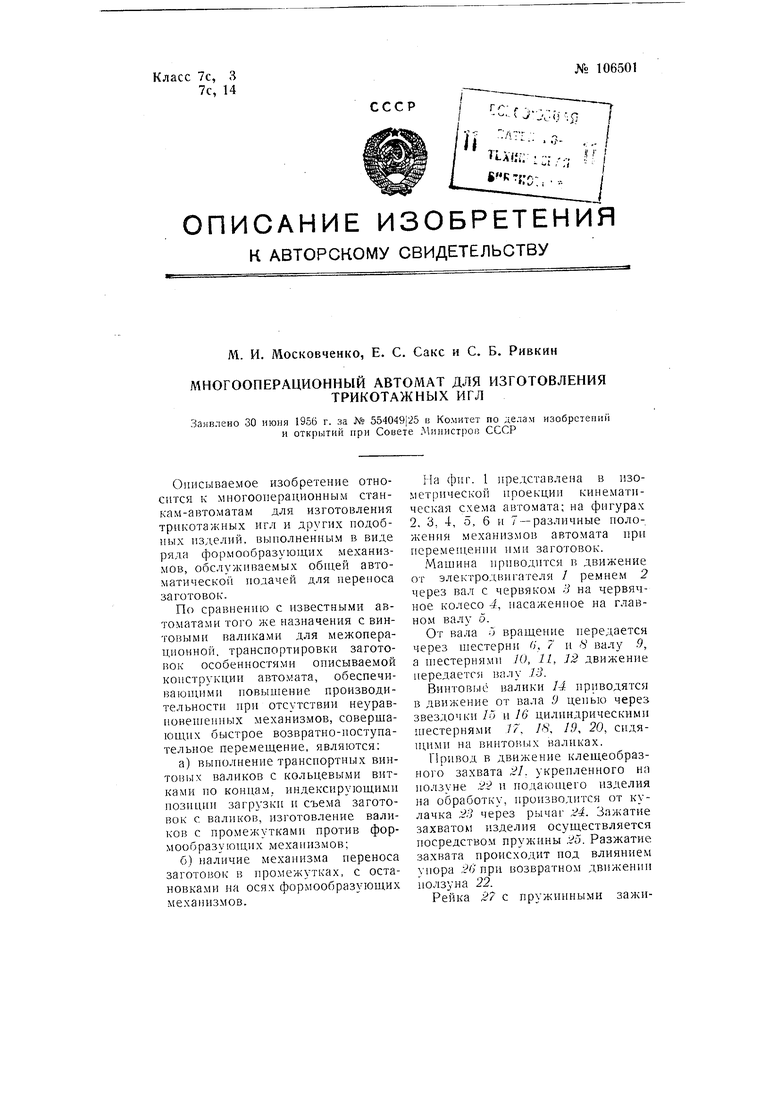
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления рыболовных крючков | 1933 |
|
SU98673A1 |
| СТАНОК-АВТОМАТ ДЛЯ СВЕРЛЕНИЯ | 2002 |
|
RU2236329C2 |
| Устройство для переноса заготовок | 1985 |
|
SU1297975A1 |
| Приспособление для автоматической подачи заготовки в горизонтально-сверлильных станках | 1940 |
|
SU86115A2 |
| Автоматический станок для изготовления петель | 1927 |
|
SU32471A1 |
| Автомат для отгибки зацепов пружин растяжения | 1989 |
|
SU1641491A1 |
| Автомат для изготовления гнутых изделий | 1986 |
|
SU1400739A1 |
| Автомат для нарезания гаек | 1961 |
|
SU149660A1 |
| Копировальный станок для изготовления изделий из целлюлоида и т.п. материалов | 1932 |
|
SU28754A1 |
| Устройство для перекладки заготовок | 1972 |
|
SU436698A1 |
53а
Фиг. 6
Фиг. 7
