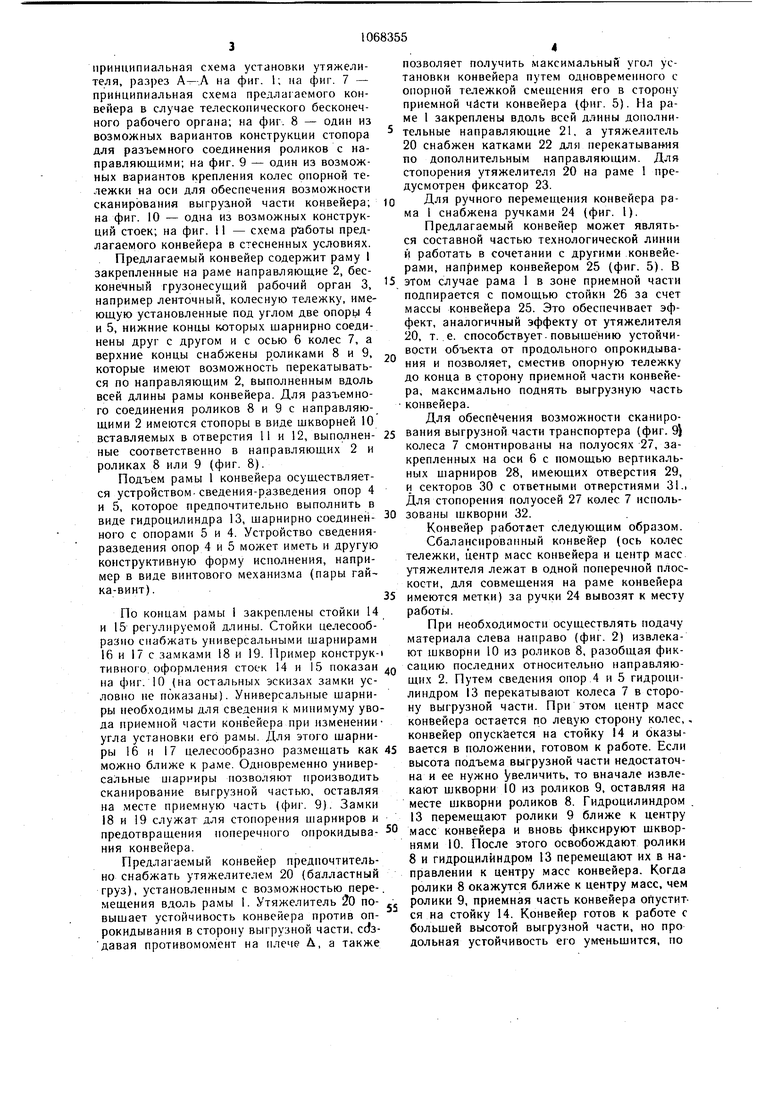
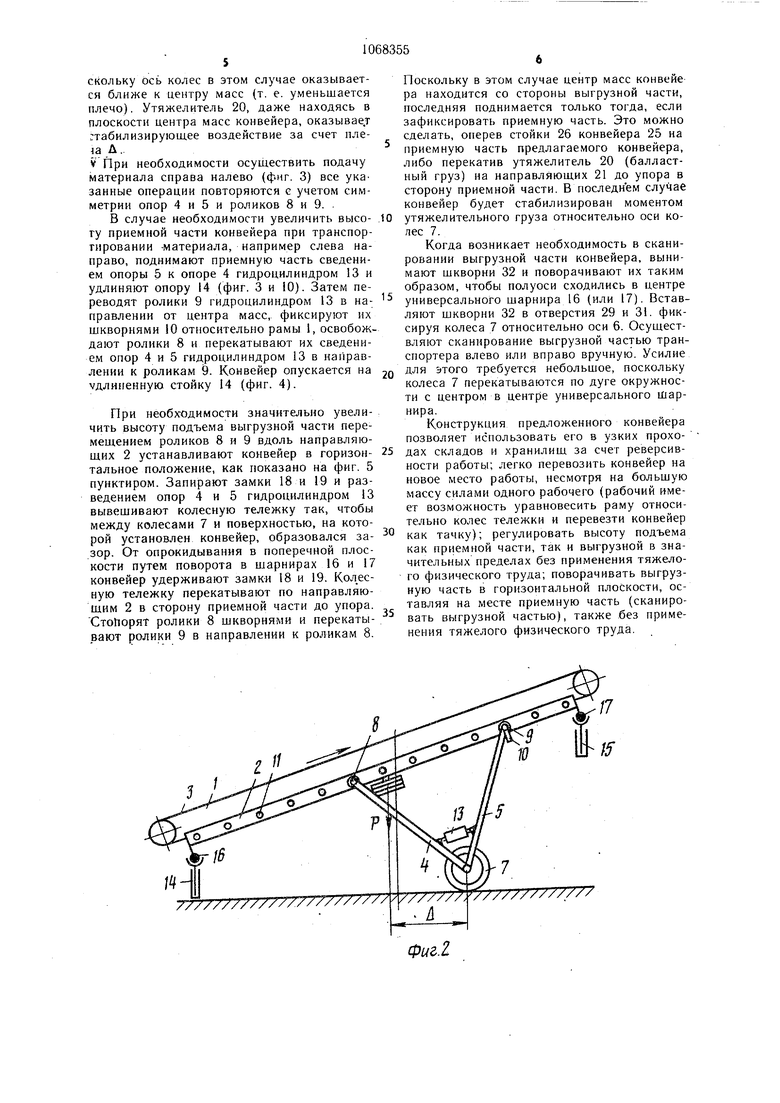
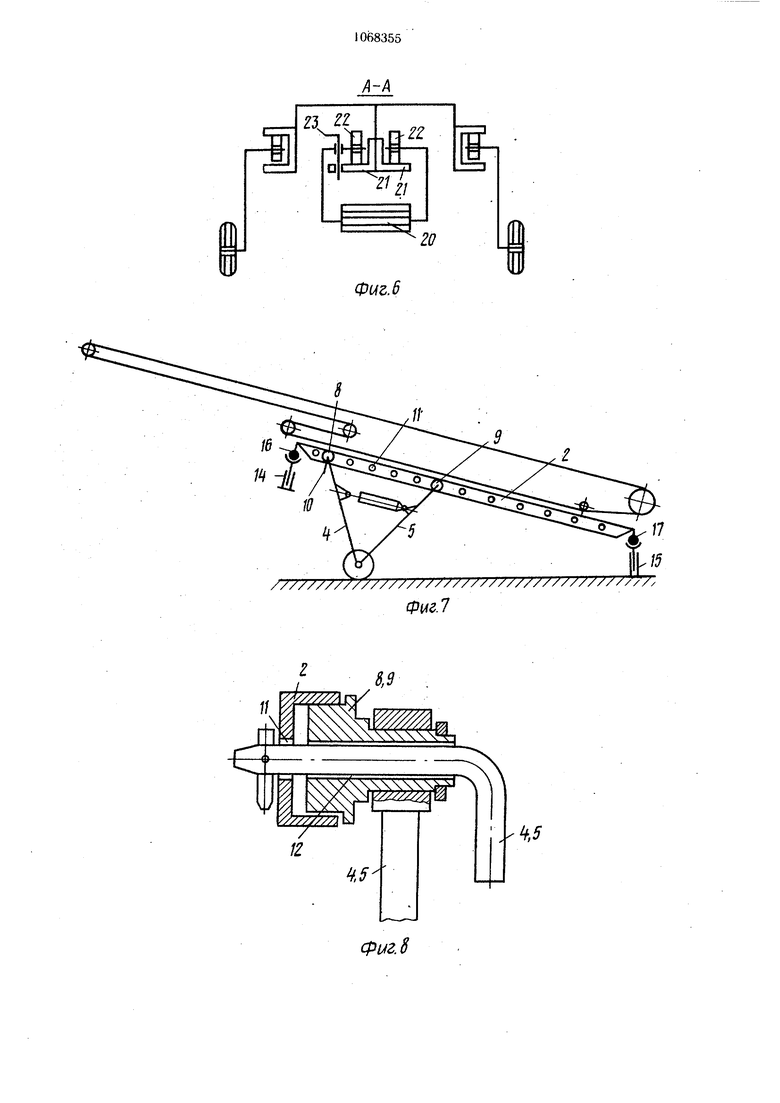
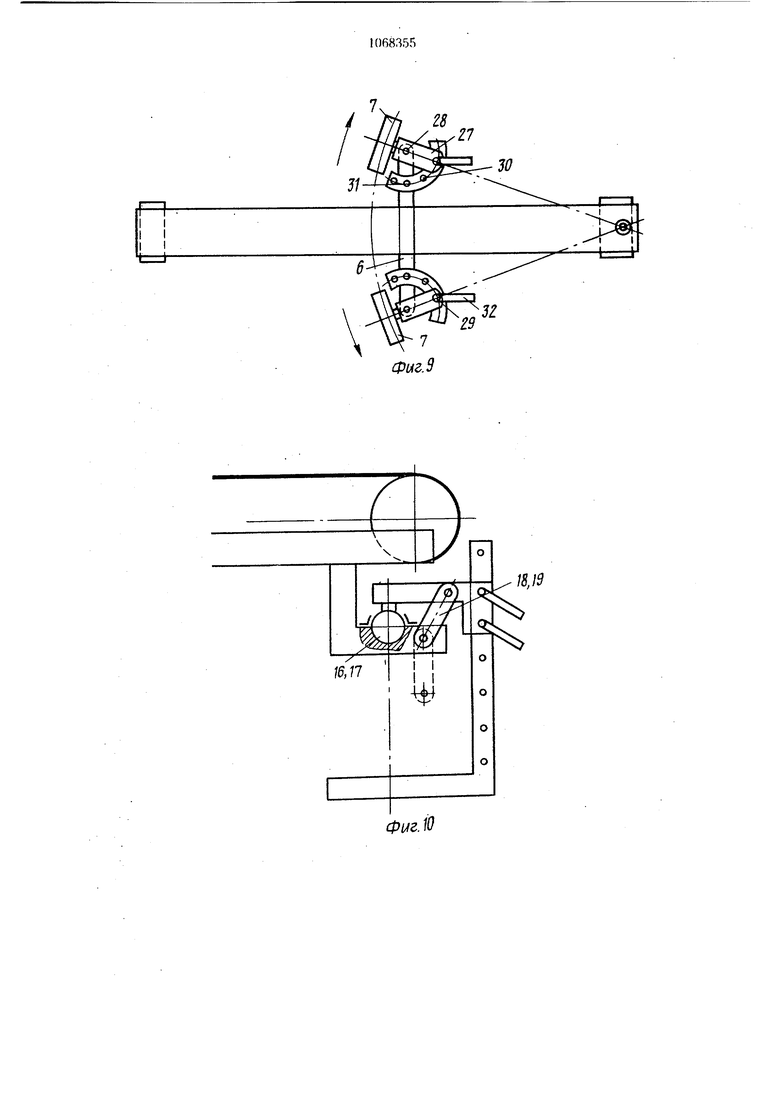
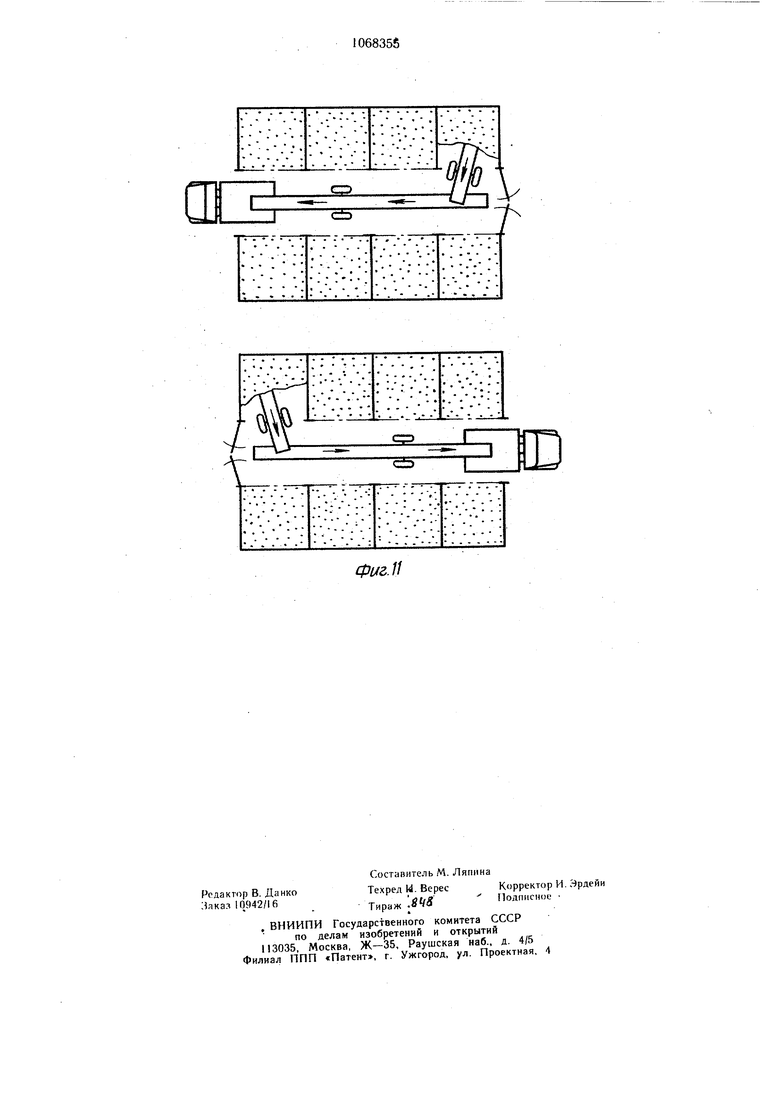
Изобретение относится к машинам непрерывного транспорта и может найти применение, в частности, для выполнения погруючно-разгрузочных работ в картофелехранилищах, зернохранилищах, складах минеральных удобрений и т. п. Известен конвейер с бесконечным грузонесущим рабочим органом, включающий раму и опорную колесную тележку с направляющими для перемещения тележки вдоль рамы. Опорная тележка имеет две пары.установленных под углом к другу симметричных стоек, которые жестко прикреплены к направляющим. По краям рамы укрепле ны ручки для ручной перевозки конвейера 1 Недостатком известного конвейера является отсутствие механизации для перемещения опорной тележки вдоль рамы и изменения, тем самым, высоты подъема выгрузного конца. Это ограничивает возможности его применения легкими конструкциями (в случае тяжелых конструкций потребовались бы специальные подъемные механизмы для подъ ема рамы). В противном случае 1-2 рабочих не в силах будут переместить тележку вдоль рамы, чтобы изменить высоту подъема конвейера или сбалансировать раму для ручной перевозки на новое место работы. Кроме того, известный конвейер не позволяет регулировать высоту подъема приемной части, нет возмо Кности также поворачивать конвейер в горизонтальной плоскости, оставляя на м.есте приемную часть. Все это снижает степень универсальности конвейера и ограничивает его функциональные возможности. Наиболее близким техническим рещением к изобретению является конвейер, включающий бесконечный грузонесущий рабочий орган, расположенный на раме с направляющими, соединенной с колесной тележкой щарнирно соединенными под углом друг к другу опорами, верхние концы одной ij,3 которых имеют ролики, расположенные в направляющих, и механизм сведения-разведения опор 2. Недостатком данного конвейера является ограниченность функциональных возможностей. Это связано с тем, что у конвейера строго фиксированы приемная и выгрузная части (что диктуется несимметричной конструкцией опорной тележки). Поэтому он может транспортировать материал только р одном направлении. В случае работы конвейера в стесненных условиях, например в узких проходах складов и хранилищ, при возникновении необходимости в изменении направления подачи материала на противоположное приходится выводить конвейер из склада и заводить вновь противоположным концом. На операцию манев)ирования затрачиваются время и средства, т. е. такая .огоаниченность функциональных возможносей приводит к снижению сменной производительности и создает неудобства в эксплуатации. Ограниченность функциональных возможностей проявляется также в нерациональности использования данной конструкции в случае телескопического грузонесущего рабочего органа. Это связано с тем, что. опорная колесная тележка в данном конвейере fie имеет возможности перемещаться вдоль рамы конвейера. Поэтому приходится устанавливать опорную тележку у выгрузного конца, чтобы при выдвижении ленты не произощло опрокидывание конвейера из-за силь но выдвинутого вперед центра тяжести. Однако при использовании конвейера с вдвинутой лентой и транспортировании сыпучего мате.риала в насыпь засыпаются колеса опорной тележки. Кроме того, невозможность сбалансировать конвейер относительно оси колес опорной тележки, что позволило бы перемещать его с одного места работы на другое вручную (приемная часть всегда тяжелее выгрузной для обеспечения устойчивости в работе, а тележка фиксирована относительно рамы), ограничивает возможности известной конструкции легкими типоразмерами и усложняет эксплуатацию. Целью изобретения является расщирение функциональных возможностей конвейера. Поставленная цель достигается тем, что конвейер, включающий бесконечный гру-зонесущий рабочий орган, расположенный на раме с направляющими, соединенной с колесной тележкой шарнирно-соединенными под углом друг к другу опорами, верхние концы одной из которых имеют ролики, расположенные в направляЕОщих, и механизм сведения-разведения опор, снабжен стойками, установленными по концам рамы с возможностью изменения их длины, а направляющие выполнены по всей длине рамы, и верхние концы другой опоры снабжены роликами, размещенными в нанравляющих, причем ролики выполнены со стопорами для соединения их с направляющими. При этом конвейер снабжен дополнительными направляющими, закрепленными на раме, и утяжелителем с катками, установленными на дополнительных направляющих. Кроме того, каждая стойка соединена с рамой посредством универсального щарнира с замками. На фиг. 1 показана принципиальная схема предлагаемого конвейера в транспортном положении; на фиг. 2 - ком.поновка предлагаемого конвейера при транспортировании материала слева направо; на фиг. 3 - то же, при транспортировании материала спраEjia налево; на фиг. 4 - то же, что на фиг. 2 но при увеличенной высоте установки приемной части; на фиг. 5 - порядок перестрой чИ предлагаемого конвейера на максималь дую вь1соту выгрузной части; на фиг. 6 принципиальная схема установки утяжелителя, разрез А-А на фиг. 1; на фиг. 7 - принципиальная схема предлагаемого конвейера в случае телескопического бесконечного рабочего органа; на фиг. 8 - один из возможных вариантов конструкции стопора для разъемного соединения роликов с направляющими; на фиг. 9 - один из возможных вариантов крепления колес опорной тележки на оси для обеспечения возможности сканирования выгрузной части конвейера; на фиг. 10 - одна из возможных конструкций стоек; на фиг. 11 - схема работы предлагаемого конвейера в стесненных условиях. Предлагаемый конвейер содержит раму I закрепленные на раме направляющие 2, бесконечный грузонесущий рабочий орган 3, например ленточный, колесную тележку, имеющую установленные под углом две опоры 4 и 5, нижние концы которых шарнирно соединены друг с другом и с осью 6 колес 7, а верхние концы снабжены роликами 8 и 9, которые имеют возможность перекатываться по направляющим 2, выполненным вдоль всей длины рамы конвейера. Для разъемного соединения роликов 8 и 9 с направляющими 2 имеются стопоры в виде шкворней 10 вставляемых в отверстия 11 и 12, выполненные соответственно в направляющих 2 и роликах 8 или 9 (фиг. 8). Подъем рамы 1 конвейера осуществляется устройством.сведения-разведения опор 4 и 5, которое предпочтительно выполнить в виде гидроцилиндра 13, шарнирно соединенного с опорами 5 и 4. Устройство сведенияразведения опор 4 и 5 может иметь и другую конструктивную форму исполнения, например в виде винтового механизма (пары гайка-винт). По концам рамы 1 закреплены стойки 14 и 15 регулируемой длины. Стойки целесообразно снабжать универсальными шарнирами 16 и 17с замками 18 и 19. Пример конструктивного. оформления стоек 14 и 15 показан на фиг. 10 (на остальных эскизах замки условно не показаны). Универсальные шарниры необходимы для сведения к минимуму уво да приемной части конвейера при изменении угла установки его рамы. Для этого шарниры 16 и 17 целесообразно размещать как можно ближе к раме. Одновременно универсальные шарниры позволяют производить сканирование выгрузной частью, оставляя на месте приемную часть (фиг. 9). Замки 18 и 19 служат для стопорения шарниров и предотвращения поперечного опрокидывания конвейера. Предлагаемый конвейер предпочтительно снабжать утяжелителем 20 (балластный груз), установленным с возможностью перемещения вдоль рамы 1. Утяжелитель 20 повышает устойчивость конвейера против опрокидывания в сторону выгрузной части, cd3давая проти омомент на плече А, а также позволяет получить максимальный угол установки конвейера путем одновременного с опорной тележкой смещения его в сторону приемной чисти конвейера (фиг. 5). На раме 1 закреплены вдоль всей длины дополнительные направляющие 21, а утяжелитель 20 снабжен катками 22 для перекатыван-ия ло дополнительным направляющим. Для стопорения утяжелителя 20 на раме 1 предусмотрен фиксатор 23. Для ручного перемещения конвейера рама 1 снабжена ручками 24 (фиг. I). Предлагаемый конвейер может являться составной частью технологической линии и работать в сочетании с другими конвейерами, например конвейером 25 (фиг. 5). В этом случае рама 1 в зоне приемной части подпирается с помощью стойки 26 за счет массы конвейера 25. Это обеспечивает эффект, аналогичный эффекту от утяжелителя 20, т. е. способствует, повышению устойчивости объекта от продольного опрокидывания и позволяет, сместив опорную тележку до конца в сторону приемной части конвейера, максимально поднять выгрузную часть конвейера. Для обеспечения возможности сканироваиия выгрузной части транспортера (фиг. 9) колеса 7 смонтированы на полуосях 27, закрепленных на оси 6 с помощью вертикальных шарниров 28, имеющих отверстия 29, и секторов 30 с ответными отверстиями 31.i Для стопорения полуосей 27 колес 7 использованы шкворни 32. Конвейер работает следующим образом. Сбалансированный конвейер (ось колес тележки, центр масс конвейера и центр масс утяжелителя лежат в одной поперечной плоскости, для совмещения на раме конвейера имеются метки) за ручки 24 вывозят к месту работы. При необходимости осуществлять подачу материала слева направо (фиг. 2) извлекают шкворни 10 из роликов 8, разобщая фиксацию последних относительно направляющих 2. Путем сведения опор 4 и 5 гидроцилиндром 13 перекатывают колеса 7 в сторону выгрузной части. При этом центр масс конвейера остается по левую сторону колес,, конвейер опускается на стойку 14 и оказывается в положении, готовом к работе. Если высота подъема выгрузной части недостаточна и ее нужно Увеличить, то вначале извлекают шкворни 10 из роликов 9, оставляя на месте шкворни роликов 8. Гидроцилиндром . 13 перемещают ролики 9 ближе к центру масс конвейера и вновь фиксируют шкворнями 10. После этого освобождают ролики 8 и гидроцилйндром 13 перемещают их в направлении к центру масс конвейера. Когда ролики 8 окажутся ближе к центру масс, чем ролики 9, приемная часть конвейера опустит, ся на стойку 14. Конвейер готов к работе с большей высотой выгрузной части, но про дольная устойчивость его уменьшится, по скольку ось колес в этом случае оказывается ближе к центру масс (т. е. уменьшается плечо). Утялселитель 20, даже находясь в плоскости центра масс конвейера, оказывае.т стабилизирующее воздействие за счет плеla А. V При необходимости осуществить подачу материала справа налево (фиг. 3) все указанные операции повторяются с учетом симметрии опор 4 и 5 и роликов 8 и 9. . В случае необходимости увеличить высоГУ приемной части конвейера при транспортировании -материала, например слева направо, поднимают приемную часть сведением опоры 5 к опоре 4 гидроцилиндром 13 и удлиняют опору 14 (фиг. 3 и 10). Затем переводят ролики 9 гидроцилиндром 13 в направлении от центра масс, фиксируют их шкворнями 10 относительно рамы 1, освобождают ролики 8 и перекатывают их сведением опор 4 и 5 гидроцилиндром 13 в направлении к роликам 9. Конвейер опускается на vдлиlleннyю стойку 14 (фиг. 4). При необходимости значительно увеличить высоту подъема выгрузной части перемещением роликов 8 и 9 вдоль направляющих 2 устанавливают конвейер в горизонтальное положение, как показано на фиг. 5 пунктиром. Запирают замки 18 и 19 и разведением опор 4 и 5 гидроцилиндром 13 вывещивают колесную тележку так, чтобы между колесами 7 и поверхностью, на которой установлен конвейер, образовался зазор. От опрокидывания в поперечной плоскости путем поворота в щарнирах 16 и 17 конвейер удерживают замки 18 и 19. Кол есную тележку перекатывают по направляющим 2 в сторону приемной части до упора. СтоПорят ролики 8 шкворнями и перекатывают ролики 9 в направлении к роликам 8.
//
Фиг.2 Поскольку в этом случае центр масс конвейе ра находится со стороны выгрузной части, последняя поднимается только тогда, если зафиксировать приемную часть. Это можно сделать, оперев стойки 26 конвейера 25 на приемную часть предлагаемого конвейера, либо перекатив утяжелитель 20 (балластный груз) на направляющих 21 до упора в сторону приемной части. В последнем случае конвейер будет стабилизирован моментом утяжелительного груза относительно оси колес 7. Когда возникает необходимость в сканировании выгрузной части конвейера, вынимают шкворни 32 и поворачивают их таким образом, чтобы полуоси сходились в центре универсального шарнира 16 (или 17). Вставляют шкворни 32 в отверстия 29 и 31. фиксируя колеса 7 относительно оси 6. Осуществляют сканирование выгрузной частью транспортера влево или вправо вручную. Усилие для этого требуется небольшое, поскольку колеса 7 перекатываются по дуге окружности с центром в центре универсального шарнира. Конструкция предложенного конвейера позволяет использовать его в узких проходах складов и хранилищ за счет реверсивности работы; легко перевозить конвейер на новое место работы, несмотря на большую массу силами одного рабочего (рабочий имеет возможность уравновесить раму относительно колес тележки и перевезти конвейер как тачку); регулировать высоту подъема как приемной части, так и выгрузной в значительных пределах без применения тяжелого физического труда; поворачивать выгрузную часть в горизонтальной плоскости, оставляя на месте приемную часть (сканировать выгрузной частью), также без применения тяжелого физического труда.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЕРЕГРУЖАТЕЛЬ | 2000 |
|
RU2172840C1 |
| Ленточный конвейер | 1989 |
|
SU1759755A1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
| Технологическая линия по производствуСТРОиТЕльНыХ издЕлий B КАССЕТНыХфОРМАХ | 1979 |
|
SU821155A1 |
| Телескопический ленточный конвейер | 1990 |
|
SU1799819A1 |
| Устройство для перемещения уборочного транспортера по полю | 1982 |
|
SU1128865A1 |
| Опорно-поворотное устройство двухосного прицепа | 2023 |
|
RU2805576C1 |
| Поточная линия формирования колесных пар подвижного состава | 1972 |
|
SU490701A1 |
| Опорно-поворотное устройство двухосного прицепа | 2022 |
|
RU2792193C1 |
1. КОНВЕЙЕР,включающий бесконечный грузонесущий рабочий орган, расположенный на раме с направляющими, соединенной с колесной тележкой шарнирносоединенными под углом друг к другу опорами, верхние концы одной из которых имеют ролики, расположенные в направляющих и механизм сведения-разведения опор, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен : стойками, установленными по концам рамы с возможностью изменения их длины, а направляющие выполнены по всей длине рамы, при этом верхние концы другой опоры снабжены роликами, размещенными в направляющих, причем ролики выполнены со .стопорами для соединения их с направляю щими. 2.Конвейер по п. 1, отличаюи(ийся тем, что он снабжен дополнительными направляющими, закрепленными на раме, и утяжелиi телем с катками, установленными на дополнительных направляющих. (Л 3.Конвейер по п. 1, отличаюш ийся тем, что каждая стойка соединена с рамой посредством универсального шарнира с замками. Ф оо со ел сл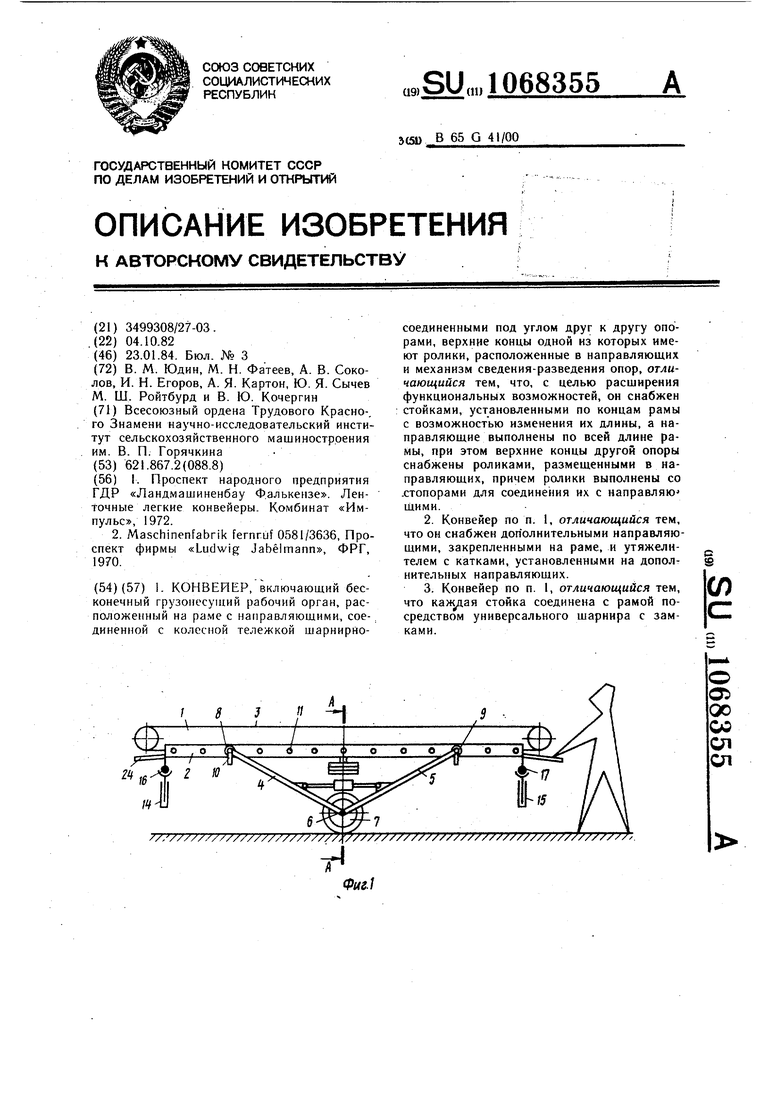
11
с±э
.П
| I | |||
| Проспект народного предприятия ГДР «Ландмашиненбау Ф.алькензе | |||
| Ленточные легкие конвейеры | |||
| Комбинат «Импульс, 1972 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автомобиль-сани, движущиеся посредством бесконечных цепей | 1922 |
|
SU581A1 |
