2. Конвейер по п.1, о т л ичающийся тем, что дополнительный силовой цилиндр вьтолнен в виде гидроципиндра.

| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1983 |
|
SU1094816A1 |
| Шагающий конвейер | 1980 |
|
SU905167A1 |
| Шагающий конвейер | 1972 |
|
SU477075A1 |
| Шаговый конвейер бнч-3 | 1979 |
|
SU893743A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шаговый конвейер | 1982 |
|
SU1082712A1 |
| Шагающий конвейер для транспортирования цилиндрических грузов | 1980 |
|
SU908691A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Шагающий конвейер | 1980 |
|
SU905165A1 |
1. Шагающий конвейер, содержа неподвижное основание с жестко зак .репленными на нем опорными элемент ми, установленную на опорных элементах нижнюю подвижную раму, зак репленные на последней стойки с ро ликами, установленную на роликах стоек верхнюю подвижную раму, смон тированные на верхней и нижней подвижньЬс рамах параллельные горизонтальные зубчатые рейки, основной силовой цилиндр с закрепленным ка штоке зубчатым колесом, расположенным между зубчатыми рейками, и дополнительный силовой цилиндр, о тличающийся тем, что, с целью повьш1ения точности позиционирования и плавности работы, дополнительный силовой цилиндр закреплен на нижней подвижной раме, которая имеет направлякщую для размещения в ней зубчатой рейки, соединенной одним концом с плунжером дополнительного сапового цилиндра, при этом опорные элементы выполнены в виде подъемных силовых цилиндров с плунжерами, жестко соединенными с нижней подвижной рамой, причем дополнительный силовой цилиндр связан с подъемными силовыми цилиндрами посредством гибкого трубопровода, при этом верхняя подвижная рама снабжена упорами, а нижняя подвижная рама подпружиненными рычажными фиксатор ами, установленными с возможностью взаимодействия с упорами.
1
Изобретение относится к подъемнотранспортному машиностроению, а ..именно к шагающим конвейерам, и может быть использовано для перемещения штучных грузов в различных отраслях промышленности.
, Известен шагакиций конвейер,содержащий неподвижную раму, подвижную раму с упорами и привод вертикального и горизонтального перемещения подвижной рамы в виде двухкамерного силового цилиндра - lj
Наиболее близким к предлагаемому является шагакиций конвейер, содержащий неподвижное основание с жестко закрепленными на нем опорными элементами, установленную на опорных элементгЬс нижнюю подвшкную раму, закрепленные на последней стойки с роликами, установленную на роликах стоек верхнюю подвижную раму, смонтированные на верхней и нижней подвижных рамах параллельные горизонтальные зубчатые рейки, основной силовой цилиндр с закрепленным на штоке зубчатым колесом, расположенным между зубчатыми рейками, и дополнительный силовой цилиндр ZJ .
Недостатком указанных конвейеров является низкая точность позиционирования из-за того, что отсутствует точный вертикальный подъем подвижнр рамы, так как при подъеме грузонесущая подвижная рама, от смещения в горизонтальном направлении удерживается тормозным силовым цилиндром, котор б силу своей конструкции не обеспечивает жесткой фиксации грузонесущей подвижной рамы при подъеме. Кроме того, конструкция указанных конвейеров не обеспечивает плавност работы при подъеме и перемещении подвижной рамы из-за наличия толчков .между элементами конструкции при подъеме и перемещении грузонесущей подвижной рамы и неравномерно подачи энергоносителя в основной силовой цилиндр.
Цель изобретения - повьш1ение точности позиционирования и плавности работы.
Указанная цель достигается тем, что в шагающего конвейере,содержащем неподвижное основание с жестко закрепленными на нем опорными элементами, установленную на опорных элементах нижнюю.подвижную раму, закрепленные на последней стойки с роликами, установленную на роликах стоек верхнкяо подвижную раму, смонтированные на верхней и нижней подьижных рамах параллельные гбризоктальные зубчатые рейки, основной силовой цилиндр с закрепленным на штоке зубчатым колесом, расположенным между зубчатыми рейками, и дополнительный силовой цилиндр, последний закреплен на нижней подвижной раме, которая имеет направлякяцую для размещения в ней зубчатой рейки, соединенной одним концом с плунжером дополнительного силового цилиндра, при этом опорные элементы выполнены в виде подъемных силовых цилиндров с плунжерами, жестко соединенными с нижней подвижной рамой, причем дополнительный силовой цилиндр связан с подъем и 1ми силовыми цилиндрами посредством гибкого трубопровода, при этом верхняя подвижная рама снабжена упорами, а нижняя подвижная рама - подпружиненными рычажными фиксаторами, установленными с возможностью взаимодействия с упорами. .
Кроме того, дополнительный силово цилиндр вьтолнен в виде гидроцилиндра.
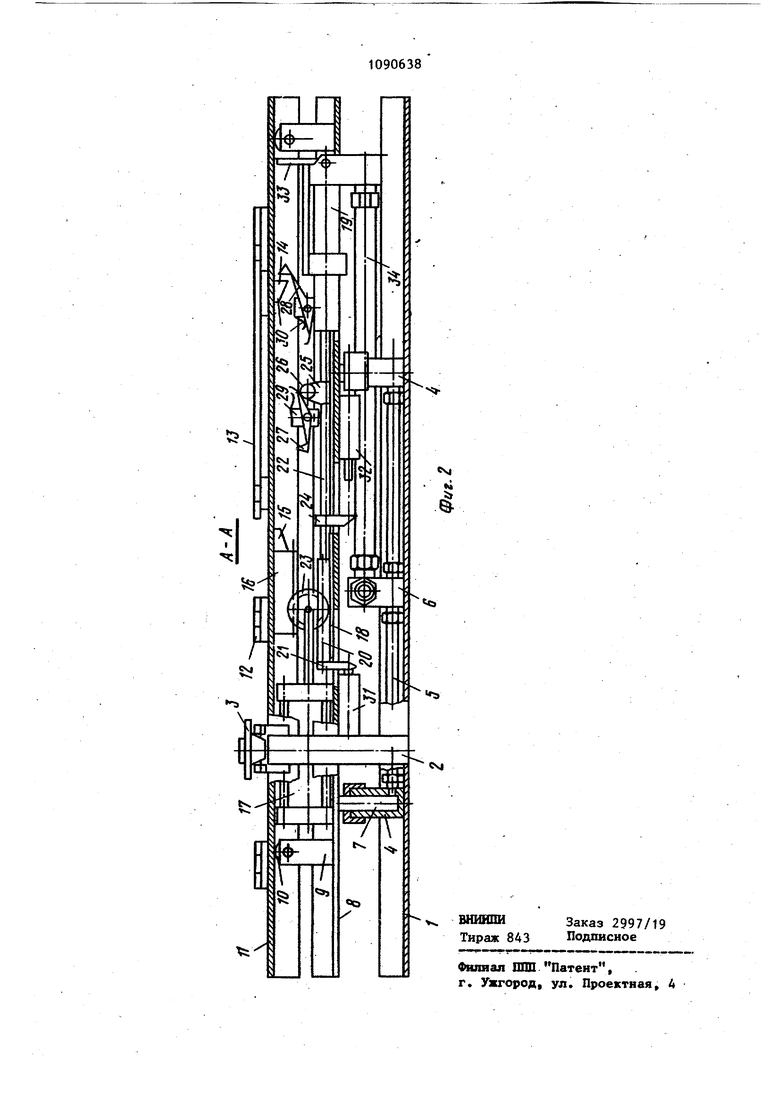
На фиг.1 изображен конвейер,вид сверху; на фиг.2 - разрез А-А на фиг.1.
Конвейер содержит неподвижное основание 1 со стойками 2, на которых размещаются перемещаемые грузы 3. На основании 1 жестко смонтированы опорные элементы - подъемные гидроцилиндры 4, полости которых
соединены гибкими шлангами 5 с трои НИКОМ 6. Плунжеры 7 подъемных гидроцилиндров 4 жестко соединены с нижней подвижной рамой 8, на которой закреплены стойки 9 с poликa ш 10, на которые опирается со свободой горизонтального перемещения верхняя подвижная рама 11. Верхняя подвижная рама 11 имеет захватные органы 12 и захватные устройства 13. В нижней части.верхняя подвижная рама 1 1 имеет неподвижные упоры - .передний 14 и задний 15,а также горизонтальную зубчатую рейку 16. На нижней раме 8 закреплены основной силовой пневмоцилиндр 17, направляющая 18 и дополнительный силовой цилиндр - насосный гидроцилиндр с управляемым обратным клапаном 19. В направляющей 18 параллельно зубчатой рейке 16 размещается зубчатая рейка 20 с задним упором 21, связанная штоком 22 с плунжером гидро- . цилиндра 19 и входящая в зацепление с зубчатым колесом 23, закрепленным на штоке основного силового пневмоцилиндра 17. Колесо 23 зацепляется также с зубчатой рейкой 16 верхней рамы 11.На штоке 22 закреплены упор 24, стойка 25 с роликом 26, контактирующим с подпружиненными рычажными фиксаторами - задним 27 и передним 28, шарнирно закрепленными на стойках 29 нижней подвижной рамы 8 и возвращаемые в исходное положение пружинами 30. Для торможения рейки 20 в конце диапазона перемещения снизу рамы 8 закр,еплены гидротормоза 31 и 32. Гидроцилиндр 19 управляется от рычага 33, который имеет возможность контактировать с упором 14.s Гибкий трубопровод шланг 34 соединяет полость гидроцилиндра 19 с тройником 6 и, следовательно, с полостями подъемных гидроцилиндров 4.
При впуске воздуха в левую полость силового пневмоцилйндра зубчатое колесо 23 начинает перекатываться по рейке 16, двигая вперед рейку 20.Рама 11 в этот момент удерживазтся от пе ремещения рычажш 1ми фиксаторами 28.
Плунжер насосного гидроцилиндра с управляемым обратным клапаном 19 вытесняет жидкость в подъемные гидроцклиндры 4, и происходит подъем рам 11 и 8. В конце диапазона перемещения рейки 20 упор 24 сталкивается со штоком .гидротормоза 32, и стойка 25 с роликом 26 плавно поворачивает фиксатор 28 , освобождая передний упор 14. Рама 11 получает возможность горизонтального перемещения , и теперь колесо 23 начинает перекатываться по рейке 20, двигая вперед раму 11. В этот момент обратный клапан гидроцилиндра 19 не позволяет перетекать жидкости из подъемных гидроцилиндров 4 в насосный гидроцилиндр 19, и поэтому не происходит опускания рам. В конце диапазона перемещения верхней рамы 11 упор 14 нажимает на рычаг 33 обратного клапана, а упор 15 зацепляется с фиксатором 27. В этот момент рама 11 уже не может перемещаться в обратном направлении, а жидкость может перетекать из гидроцшшндров 4 гидроцилиндр 19. При выпуске воздуха из левой попостц пневмоцилйндра 17 и впуске его в правую полость колесо 23 начинает перекатываться по рейке 16 в обратном направлении,двигая назад рейку 20 и плунжер гидроцилиндра 19. Жидкость перетекает из подъемных гидроцилиндров 4 в насосный гидроцилиндр 19, и происходит опускание рам. В конце диапазона перемещения рейки 20 упор 21 нажимает на шток гидротормоза 31 и стойка 25 с роликом 26 плавно нажимает на подпружиненный фиксатор 27, упор 15 освобождается, и рама 11 получает возможность перемещаться в обратном направлении. В этот момент рамы 11 и 8 уже находятся § своем нижнем исходном положении. Колеса 23 перекатываются по рейхе 20, двигая назад рейку 16 и раму 11 к исходному положению.
Далее цикл работы конвейера повторяется .
В связи с демпфирунмцими свойствами жидкости при ее перетекании по трубам отпадает необходимость при енения тормозных устройств на плунжерах подъемных гидроцилиндров. Подъем грузов происходит плавно.
Указанная конструкция обеспечивает точность позиционирования при плавной работе конвейера.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Пропорциональный модулятор давления | 1984 |
|
SU1286452A1 |
| Горный компас | 0 |
|
SU81A1 |
| Приспособление к индикатору для определения момента вспышки в двигателях | 1925 |
|
SU1969A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шагающий конвейер | 1972 |
|
SU477075A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| . | |||
